一种船型性能预报与优化方法及系统与流程
1.本发明涉及计算机仿真设计技术领域,具体涉及一种船型性能预报与优化方法及系统。
背景技术:
2.船型优化设计是船舶总体设计的核心环节,近年来一种面向知识化、智能化的船型设计模式——基于仿真的设计(simulation based design,sbd)技术悄然兴起,将传统的“先提方案后做评估”的正向设计模式转变为新型的“以设计目标驱动方案生成”的逆向设计模式,大幅提升了船型智能设计能力。船型优化设计的核心是找到性能较优的船体外形,同时由于船体外形复杂多变,为能更加精确和丰富地表达船体外形,需要采用众多参数来控制船体外形,实现船体外形的连续型变化。船型优化问题的设计变量即为控制船体外形变形的参数,控制船体变形的参数越多,意味着船型优化问题的维度越大,需要启动大量的船型特征变化和水动力性能cfd计算工作,对计算资源消耗较大。为此,引入机器学习和人工智能技术,探索船型智能化优化设计技术,正逐步成为船型设计技术的新发展方向。
3.但目前的船型优化技术方案,缺乏对船型特征逆向识别的技术开发,且主要是基于单一样本船型变形生成新的船型样本点,并通过训练得到船舶性能预报模型,能够适用的船型覆盖面较窄,适用的船型会局限在与样本船型几何特征差别较小的同类特征船型,难以涵盖千差万别的船型特征,同时利用样本船型训练获得船舶性能预报模型,在应用过程中同类技术往往需要在船型预报与优化应用时进行船型三维模型预处理,提取型值点,导入预报模型进行预报优化并输出新的型值点,而船舶水动力研究后续流程常需要开展模型试验,模型加工是基于船体三维几何模型进行数控切削,预报模型导出的型值点,需要再绘制型线图,并基于三维建模软件建立船体优化后船体三维模型,流程繁琐且需要技术人员手动计算目标船型特征参数,导入到系统中进行评估和优化,而无法通过导入三维模型(如iges格式文件)的方式实现自动化性能分析与船型优化设计,人工成本高、时间消耗大且船型评估和优化效率也比较低下。
技术实现要素:
4.为解决现有船型优化过程中存在的人工成本高、时间消耗大、对船型的评估和优化效率低下以及船型适用方面有较大局限性等问题,本发明提供了一种船型性能预报与优化方法,基于多样本船型,采用特定的船型特征提取方法、船型曲面特征变形方法和船型性能预报模型生成方法,训练生成与所选样本船型相对应的多个船舶性能预报模型,并基于船型三维几何模型建立船型特征比较分析目标函数,从众多样本船型中筛选出与目标船型相匹配的母型船,通过船型比较分析确定预报模型输入参数,构建基于目标船型三维几何模型的预报与优化设计方法,能够有效扩展船舶性能预报模型所能涵盖的船型范围,提高预报模型的适用范围和应用效果。本发明还涉及一种船型性能预报与优化系统。
5.本发明的技术方案如下:
6.一种船型性能预报与优化方法,其特征在于,包括以下步骤:
7.船型特征提取步骤:获取多个母型船为样本船型的三维几何模型,基于三维几何模型提取各样本船型的尺度特征参数,并对三维几何模型和尺度特征参数进行标准化处理;基于标准化处理后的三维几何模型,提取各样本船型的船型特征线,根据船型特征线获取各样本船型的船型特征拐点三维坐标和型值点三维坐标;
8.船型曲面特征变形步骤:根据标准化处理后的尺度特征参数、船型特征线、船型特征拐点三维坐标和型值点三维坐标,计算出各样本船型曲面不同特征区域的特征长度和位置坐标;基于特征长度、位置坐标和船型特征线,利用曲面变形技术对各样本船型曲面构建三维几何变形控制体,得到各样本船型的曲面变形控制参数及其变化范围,并采用拉丁超立方算法对样本船型的曲面变形控制参数变化范围内的多个样本点进行采集,基于采集的多个样本点,利用曲面变形技术对各样本船型进行三维几何变形,得到与曲面变形控制参数一一对应的多个船型样本点三维几何模型;
9.性能预报模型生成步骤:基于多个船型样本点三维几何模型,采用船舶cfd技术计算出船舶水动力性能特征参数,将变形后的样本船型各样本点对应的尺度特征参数和曲面变形控制参数作为输入,船舶水动力性能特征参数作为输出,基于bp神经网络方法进行模型训练,得到多个样本船型的性能预报模型;
10.目标函数构建步骤:获取目标船型的三维几何模型,并根据船型特征提取步骤和船型曲面特征变形步骤获得目标船型的型值点三维坐标和曲面变形控制参数,根据目标船型和样本船型的型值点三维坐标计算出目标船型与样本船型的型值点平均间距和间距最大值,在给定船型特征的限制条件下,根据型值点平均间距和间距最大值,构建目标船型与样本船型特征对比分析的目标函数;
11.参数值获取步骤:以目标船型的曲面变形控制参数作为输入,目标函数作为输出,基于遗传算法迭代计算出目标函数的最小值,以筛选出与目标船型相匹配的样本船型,并获取目标函数最小值时的船型曲面变形控制参数值,将船型曲面变形控制参数值输入与目标船型相匹配的样本船型的性能预报模型中,得到目标船型的水动力性能数据;
12.船型优化步骤:以目标船型的曲面变形控制参数作为输入,以性能预报模型输出的水动力性能数据为目标函数作为输出,基于遗传算法对目标船型进行分析和优化,得到目标船型的性能优化方案以及对应的船型曲面变形控制参数组,根据船型曲面变形控制参数组,重复船型曲面特征变形步骤,对目标船型进行三维几何变形,完成目标船型的三维几何模型优化。
13.优选地,所述船型特征提取步骤中,所述尺度特征参数包括船型基本尺度参数和船型全局特征参数,所述船型基本尺度参数包括船舶垂线间长、船舶设计水线长、船舶型宽、船舶设计吃水、螺旋桨轴高和螺旋桨盘面距艉垂线的距离的任意组合,所述船型全局特征参数包括船舶长宽比、船舶宽度吃水比、方形系数、船舶湿表面积和浮心纵向位置的任意组合。
14.优选地,所述船型特征提取步骤中,所述船型特征线包括船体横剖线、船体纵剖线、水线、中纵剖线、首尾轮廓线、平边线、平底线和船舶横剖面积分布曲线的任意组合。
15.优选地,所述目标函数构建步骤中,根据方形系数和浮心纵向位置计算出目标船型与样本船型的方形系数残差和浮心纵向位置残差,以构建出船型特征限制条件。
16.优选地,所述参数值获取步骤中,在计算目标函数的最小值时,还根据目标船型与样本船型的方形系数残差和浮心纵向位置残差与预设阈值的比对结果判断计算的目标函数的最小值是否有效,若方形系数残差小于第一预设阈值,且浮心纵向位置残差小于第二预设阈值,则计算的目标函数的最小值有效。
17.一种船型性能预报与优化系统,其特征在于,包括依次连接的船型特征提取模块、船型曲面特征变形模块、性能预报模型生成模块、目标函数构建模块、参数值获取模块以及船型优化模块,
18.船型特征提取模块,获取多个母型船为样本船型的三维几何模型,提取三维几何模型中各样本船型的尺度特征参数,并对三维几何模型中的三维几何模型和尺度特征参数进行标准化处理;基于标准化处理后的三维几何模型,提取各样本船型的船型特征线,根据船型特征线获取各样本船型的船型特征拐点三维坐标和型值点三维坐标;
19.船型曲面特征变形模块,根据标准化处理后的尺度特征参数、船型特征线、船型特征拐点三维坐标和型值点三维坐标,计算出各样本船型曲面不同特征区域的特征长度和位置坐标;基于特征长度、位置坐标和船型特征线,利用曲面变形技术对各样本船型曲面构建三维几何变形控制体,得到各样本船型的曲面变形控制参数及其变化范围,并采用拉丁超立方算法对样本船型的曲面变形控制参数变化范围内的多个样本点进行采集,基于采集的多个样本点,利用曲面变形技术对各样本船型进行三维几何变形,得到与曲面变形控制参数一一对应的多个船型样本点三维几何模型;
20.性能预报模型生成模块,基于多个船型样本点三维几何模型,采用船舶cfd技术计算出船舶水动力性能特征参数,将变形后的样本船型各样本点对应的尺度特征参数和曲面变形控制参数作为输入,船舶水动力性能特征参数作为输出,基于bp神经网络方法进行模型训练,得到多个样本船型的性能预报模型;
21.目标函数构建模块,获取目标船型的三维几何模型,并根据船型特征提取模块和船型曲面特征变形模块获得各目标船型的型值点三维坐标和曲面变形控制参数,根据目标船型和样本船型的型值点三维坐标计算出目标船型与样本船型的型值点平均间距和间距最大值,在给定船型特征的限制条件下,根据型值点平均间距和间距最大值,构建目标船型与样本船型特征对比分析的目标函数;
22.参数值获取模块,以目标船型的曲面变形控制参数作为输入,目标函数作为输出,基于遗传算法迭代计算出目标函数的最小值,以筛选出与目标船型相匹配的样本船型,并获取目标函数最小值时的船型曲面变形控制参数值,将船型曲面变形控制参数值输入与目标船型相匹配的样本船型的性能预报模型中,得到目标船型的水动力性能数据;
23.船型优化模块,以目标船型的曲面变形控制参数作为输入,以性能预报模型输出的水动力性能数据为目标函数作为输出,基于遗传算法对目标船型进行分析和优化,得到目标船型的性能优化方案以及对应的船型曲面变形控制参数组,根据船型曲面变形控制参数组,重复船型曲面特征变形步骤,对目标船型进行三维几何变形,完成目标船型的三维几何模型优化。
24.优选地,所述尺度特征参数包括船型基本尺度参数和船型全局特征参数,所述船型基本尺度参数包括船舶垂线间长、船舶设计水线长、船舶型宽、船舶设计吃水、螺旋桨轴高和螺旋桨盘面距艉垂线的距离的任意组合,所述船型全局特征参数包括船舶长宽比、船
舶宽度吃水比、方形系数、船舶湿表面积和浮心纵向位置的任意组合。
25.优选地,所述船型特征线包括船体横剖线、船体纵剖线、水线、中纵剖线、首尾轮廓线、平边线、平底线和船舶横剖面积分布曲线的任意组合。
26.优选地,所述目标函数构建模块中,根据方形系数和浮心纵向位置计算出目标船型与样本船型的方形系数残差和浮心纵向位置残差,以构建出船型特征限制条件。
27.优选地,所述参数值获取模块中,在计算目标函数的最小值时,还根据目标船型与样本船型的方形系数残差和浮心纵向位置残差与预设阈值的比对结果判断计算的目标函数的最小值是否有效,若方形系数残差小于第一预设阈值,且浮心纵向位置残差小于第二预设阈值,则计算的目标函数的最小值有效。
28.本发明的有益效果为:
29.本发明提供的一种船型性能预报与优化方法,基于多个样本船型的三维几何模型,采用特定的船型特征提取方法、船型曲面特征变形方法和船型性能预报模型生成方法,训练生成多个船舶性能预报模型,能够有效扩展船舶性能预报模型所能涵盖的船型范围;再采用特定的计算方式构建目标船型与样本船型特征对比分析的目标函数,可以进行目标船型与样本船型特征比较分析,从众多样本船型(母型船)中筛选出与目标船型相匹配的母型船,合理选择与目标船型相匹配的样本船型及船舶性能预报模型,通过特征比较分析确定目标船型与样本船型参数对应关系,以及船型性能预报模型的输入参数,有效提高船型性能预报模型的适用范围和应用效果;最后采用特定的优化方法构建目标船型预报与优化设计,在应用时可以直接导入目标船型iges格式的三维几何模型,进行船型性能快速预报与优化,通过优化返回新的目标船型三维几何模型,可直接应用于后续模型试验船模加工等流程,无需如现有技术对船体三维几何模型重复建模等人工操作的繁琐流程,有效提高了工作效率。
30.本发明还涉及一种船型性能预报与优化系统,该系统与上述的船型性能预报与优化方法相对应,可理解为是一种实现上述船型性能预报与优化方法的系统,包括依次相连的船型特征提取模块、船型曲面特征变形模块、性能预报模型生成模块、目标函数构建模块、参数值获取模块以及船型优化模块,各模块相互协同工作,基于多个样本船型的三维几何模型,采用特定的船型特征提取方法、船型曲面特征变形方法和性能预报模型生成方法,训练生成多个船舶性能预报模型,并基于建立目标船型与样本船型特征对比分析的目标函数,可以进行目标船型与样本船型特征比较分析,从众多样本船型中筛选出与目标船型相匹配的母型船,同时构建目标船型预报与优化设计,能够有效扩展船舶性能预报模型所能涵盖的船型范围,提高预报模型的适用范围和应用效果。
附图说明
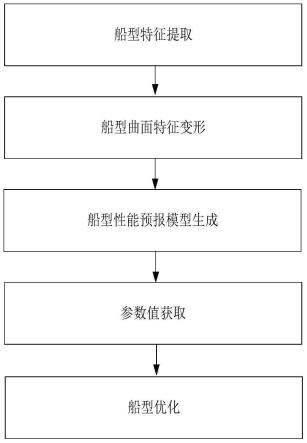
31.图1是本发明船型性能预报与优化方法的流程图。
32.图2是本发明船型性能预报与优化方法的优选流程图。
具体实施方式
33.下面结合附图对本发明进行说明。
34.本发明涉及一种船型性能预报与优化方法,该方法的流程图如图1所示,依次包括
以下步骤:
35.船型特征提取步骤:获取多个母型船为样本船型的三维几何模型,基于三维几何模型提取各样本船型的尺度特征参数,并对三维几何模型和尺度特征参数进行标准化处理;基于标准化处理后的三维几何模型,提取各样本船型的船型特征线,根据船型特征线获取各样本船型的船型特征拐点三维坐标和型值点三维坐标;
36.具体地,如图2所示的优选流程图,先获取多个母型船作为样本船型的三维几何模型(igs/iges格式),三维几何模型长度单位为“米”,模型坐标原点位于船舶尾垂线与船舶基线交点处,坐标系x轴方向为从船尾致船首方向,y轴方向为船舶右舷指向左舷,z轴方向为船底指向甲板垂直向上方向;再基于三维几何模型提取各样本船型的尺度特征参数,其中,尺度特征参数为代数型参数,根据参数特点可以分为两类,第一类尺度特征参数为船型基本尺度参数,直接通过三维模型测量提取或通过输入参数值来获得,包括:船舶垂线间长、船舶设计水线长、船舶型宽、船舶设计吃水、螺旋桨轴高和螺旋桨盘面距艉垂线的距离,此类参数单位为长度单位“米”。
37.第一类尺度特征参数,船型基本尺度特征参数的获取方法如下:
38.船舶垂线间长(表示为l
bp
):通过提取艏柱与设计水线交点与船舶艉垂线间x方向距离来获取,单位为:米;
39.船舶设计水线长(表示为l
wl
):基于船舶设计吃水提取船舶设计水线,通过读取设计水线前端与后端沿x方向的距离来获取,单位为:米;
40.船舶型宽(表示为b):通过提取船舶左右舷表面与船舶舯线面交线在y方向的最大距离来获取,单位为:米;
41.船舶设计吃水(表示为td):通过输入参数值来获取,单位为:米;
42.其中,螺旋桨轴高(即螺旋桨轴距基线高度,表示为hs)、螺旋桨盘面距艉垂线距离(表示为x
p
)、螺旋桨直径(表示为d
p
)等参数通过输入参数值来获取,单位均为:米。
43.第二类尺度特征参数为船舶全局特征参数,能够反映不同船型外形全局特点,此类参数是通过船型第一类特征参数间的组合运算或通过船体几何模型积分获得,包括:长宽比、宽度吃水比、方形系数、船舶湿表面积和浮心纵向位置。
44.第二类尺度特征参数,船舶全局特征参数的表示如下:
45.长宽比(表示为l
bp
/b):
[0046][0047]
宽度吃水比(表示为b/td):
[0048][0049]
方形系数(表示为cb):
[0050][0051]
其中:为船舶排水体积,单位为:米3,通过船舶设计水线以下体积积分来获得;
[0052]
船舶湿表面积(表示为s),单位为:米2,通过船舶设计水线以下表面积积分来获得;
[0053]
船舶浮心纵向位置(表示为l
cb
):
[0054][0055]
其中:x
cb
为船舶浮心x方向坐标,单位为:米,通过获取船舶设计水线以下体积形心来获得。
[0056]
然后,对三维几何模型和尺度特征参数进行标准化处理,具体地,定义船长为标准长度,确定船舶缩尺比λ,船舶缩尺比确定方法如下:
[0057][0058]
其中:l
bp
为船舶垂线间长,单位为“米”;ln为船舶归一化处理后的标准船长,单位为“米”。
[0059]
依据船舶缩尺比λ将样本船型几何模型缩尺至标准船长,将船舶主尺度参数依照缩尺比转换到标准化船舶尺度下的对应值。
[0060]
在标准化处理完成后,基于标准化处理后的三维几何模型,提取各样本船型的船型特征线。船型特征线包括船体横剖线、纵剖线、水线、中纵剖线、首尾轮廓线、平边线、平底线以及船舶横剖面积分布曲线;
[0061]
其中,船型特征线提取方法为:沿着x轴和z轴按照等间距平面对船体几何模型进行剖分,获得船舶各站横剖线和船舶不同吃水下水线;提取z=0平面与船体曲面交线中y≠0的曲线段,获得船舶平底线;提取y=b/2平面与船体表面交线,获得船舶平边线;提取y=0平面与船体曲面交线,获得船舶中纵剖线;针对船舶各站横剖线,针对设计吃水以下部分进行积分,获得船舶横剖面面积曲线。可以理解的是,其余船型特征线均按照类似剖切船体曲面的方式来获取,此处不再赘述。
[0062]
然后,根据提取的船型特征线获取标准化船体几何曲面上的各样本船型的船型特征拐点三维坐标和型值点三维坐标;
[0063]
具体实现方法为:提取船舶平边线平行中体直线段至艏艉曲线段转折点三维坐标,获取平行中体起始位置点三维坐标d
ps
(x
ps
,y
ps
,z
ps
)和结束位置点d
pe
(x
pe
,y
pe
,z
pe
)三维坐标;提取平边线与船舶设计水线交点三维坐标d
ps1
(x
ps1
,y
ps1
,z
ps1
)和d
pe1
(x
pe1
,y
pe1
,z
pe1
),以及船舶中纵剖线起始点三维坐标d
st
(x
st
,y
st
,z
st
);提取平边线、平底线与船舶各站横剖线的交点三维坐标;提取船舶水线与船舶横剖线、艏艉轮廓线的系列交点,获得船体表面型值点及其三维坐标值;其余船型特征点三维坐标均按照类似方法,提取船型特征线交点或曲率转折点的方式来获取,此处不再赘述。
[0064]
船型曲面特征变形步骤:根据标准化处理后的尺度特征参数、船型特征线、船型特征拐点三维坐标和型值点三维坐标,计算出各样本船型曲面不同特征区域(如船舶艏艉曲面、平行中体以及艏艉曲面至平行中体过渡区域)的特征长度和位置坐标;
[0065]
其中,确定船舶平行中体长度l
pb
=x
pe-x
ps
;船舶设计水线平行中体段长度为l
pbwl
=x
pe1-x
ps1
;艏部进流段曲面起始位置x坐标为x
in1
=x
ps1
,特征长度l
in
=x
bp-x
in1
;艉部去流段曲面起始位置x坐标为x
out1
=x
p
,终止位置x坐标为x
out2
=x
ps
,特征长度l
in
=x
out2-x
out1
,其中xp为螺旋桨盘面纵向位置;确定船舶艉封板位置x
st
=l
bp-l
wl
;艉封板至船舶尾部去流段曲面起始点长度l
sp
=x
p-(l
bp-l
wl
)等。
[0066]
在计算出船型曲面不同特征区域的特征长度和位置坐标后,基于特征长度、位置
坐标和船型特征线,利用曲面变形技术对各样本船型曲面构建三维几何变形控制体,得到各船型的曲面变形控制参数及其变化范围;具体地,先建立任意曲面几何变形控制体,然后将船型特征提取步骤获得的船型特征线、特征长度和位置坐标与控制体的尺度位置相关联,使控制体覆盖船体艏艉曲面、船舶平行中体、船舶艉封板区域以及船舶球鼻艏等船体曲面;并设置控制体内的变形控制点,将控制点的移动方向和移动距离设定为船体曲面变形控制参数;通过改变控制点位置和方向,改变控制体的形状,进而改变样本船型形状,实现船型整体丰满度变化、船舶艏部和尾部丰满度变化、船舶艏艉排水量分布变化、船舶艏尾横剖面线uv度变化等船型细节曲面特征变形。其中,通过船型y方向和z方向缩尺变形,实现船型长宽比l
bp
/b、宽度吃水比b/td变化,进而实现船型曲面特征变形。
[0067]
然后采用拉丁超立方算法对各样本船型的曲面变形控制参数变化范围内的多个样本点进行采集,获得各样本点对应的船型曲面变形控制参数,采用曲面变形技术对各样本船型进行三维几何变形,得到与曲面变形控制参数一一对应的多个船型样本点三维几何模型,构建出基于样本船型的新的衍生船型数据集。
[0068]
性能预报模型生成步骤:基于多个样本船型变形得到的多个船型样本点三维几何模型,采用船舶cfd技术计算出船舶水动力性能特征参数,其中,船型水动力性能特征参数为船舶阻力系数、船舶推进因子等船舶快速性特征参数,也可以是船舶快速性、耐波性水动力性能特征参数中的一种或几种;
[0069]
然后将变形后的各个样本船型的各样本点对应的船型全局特征参数和曲面变形控制参数作为输入,船舶水动力性能特征参数作为输出,基于bp神经网络方法分别进行模型训练,得到各个样本船型对应的船舶性能预报模型;并对性能预报模型进行精度检验,根据检验结果重复上述步骤进行船型样本点补充和精度完善,直至性能预报模型精度达到目标要求。
[0070]
目标函数构建步骤:获取目标船型的三维几何模型,并根据船型特征提取步骤和船型曲面特征变形步骤获得各目标船型的型值点三维坐标和曲面变形控制参数,根据目标船型和样本船型的型值点三维坐标计算出目标船型与样本船型的型值点平均间距和间距最大值,在给定船型特征的限制条件下,根据型值点平均间距和间距最大值,构建目标船型与样本船型特征对比分析的目标函数;
[0071]
具体地,型值点三维坐标的提取是基于船舶水线与船舶横剖线、艏艉轮廓线的系列交点,并对交点依据水线从船底向上、从船尾到船艏的顺序进行编号,例如目标船型和样本船型编号为ij的型值点及其三维坐标分别表示为p
ij
(x
ij
,y
ij
,z
ij
)和p
′
ij
(x
′
ij
,y
′
ij
,z
′
ij
)。
[0072]
根据型值点三维坐标计算出目标船型与样本船型相同编号的型值点间距d
ij
,按照下式进行计算:
[0073][0074]
并计算出目标船型与样本船型各区域相同编号多个型值点平均间距d
average
,按照下式进行计算:
[0075]
[0076]
上式中,i和j分别对应横剖线和对应横剖线上型值点的编号;m和n分别代表水线数量和每条水线上选取的型值点的数量,在水线上的型值点采用非均匀排布,艏艉几何曲率较复杂的区域分布更多的点,更好的反映船型几何特征。
[0077]
再计算出目标船型与样本船型多个型值点中间距最大值d
max
,按照下式进行计算:
[0078][0079]
上式中,i=1,2,...m j=1,2,...n。
[0080]
并根据目标船型方形系数、目标船型浮心纵向位置、样本船型方形系数、样本船型浮心纵向位置计算出目标船型与样本船型方形系数残差ε1和浮心纵向位置残差ε2,其中,方形系数残差ε1按照下式进行计算:
[0081][0082]
浮心纵向位置残差ε2按照下式进行计算:
[0083][0084]
上式中,ε1为目标船型和样本船型方形系数残差,无量纲,采用百分比表示;ε2为目标船型和样本船型浮心纵向位置残差,无量纲,采用百分比表示;cb为目标船型方形系数,无量纲;c'b为样本船型方形系数,无量纲;l
cb
为目标船型浮心纵向位置,无量纲;l'
cb
为样本船型浮心纵向位置,无量纲。
[0085]
在得到目标船型与样本船型的型值点平均间距和间距最大值后,根据型值点平均间距、型值点间距最大值、目标船型和样本船型方形系数残差以及目标船型和样本船型浮心纵向位置残差构建目标船型与样本船型特征对比分析的目标函数d
function
:
[0086]dfuncsion
=αd
average
+βd
max
ꢀꢀ
(11)
[0087]
ε1《δ1ꢀꢀ
(12)
[0088]
ε2《δ2ꢀꢀ
(13)
[0089]
上式中,d
funrtion
为目标船型和样本船型型值点加权间距,其数值越小,反映目标船型与样本船型型值点越贴近;α和β为权重系数,取值范围为0-1;δ1和δ2为方形系数残差和浮心纵向位置残差限制值(即预设阈值),当ε1和ε2小于残差限制值时,视为满足限制条件,否则视为无效方案。
[0090]
参数值获取步骤:以目标船型曲面变形控制参数作为自变量输入,以目标函数作为输出,并以公式(12)和公式(13)为限制条件,基于遗传算法开展目标船型与多个样本船型中选定的样本船型的几何模型贴近,并判定目标函数、方形系数残差ε1和浮心纵向位置ε2残差是否达到几何贴近标准,若未达到几何贴近标准,则从多个样本船型中重新选取新的样本船型进行几何特征分析与船型几何贴近,直至几何贴近达标,计算出几何模型贴近达标值,即目标函数的最小值,以筛选出与目标船型相匹配的样本船型(母型船),并获取几何模型贴近达标时的船型曲面变形控制参数值,将该船型曲面变形控制参数值输入几何贴近达标时的样本船型的性能预报模型中,得到目标船型的水动力性能数据,实现目标船型性能预报。
[0091]
船型优化步骤:以目标船型的曲面变形控制参数作为输入,以性能预报模型输出
的水动力性能数据为目标函数作为输出,基于遗传算法对目标船型进行分析和优化,得到目标船型的性能优化方案以及对应的船型曲面变形控制参数组;并根据船型曲面变形控制参数组,重复船型曲面特征变形步骤,对目标船型进行三维几何变形,并获取优化后的目标船型三维几何模型,完成目标船型的三维几何模型优化。
[0092]
本发明还涉及了一种船型性能预报与优化系统,该系统与上述船型性能预报与优化方法相对应,可理解为是实现上述方法的系统,该系统包括依次相连的船型特征提取模块、船型曲面特征变形模块、船型性能预报模型生成模块、目标函数构建模块、参数值获取模块以及船型优化模块,具体地,
[0093]
船型特征提取模块,获取多个母型船为样本船型的三维几何模型,提取三维几何模型中各样本船型的尺度特征参数,并对三维几何模型中的三维几何模型和尺度特征参数进行标准化处理;基于标准化处理后的三维几何模型,提取各样本船型的船型特征线,根据船型特征线获取各样本船型的船型特征拐点三维坐标和型值点三维坐标;
[0094]
船型曲面特征变形模块,根据标准化处理后的尺度特征参数、船型特征线、船型特征拐点三维坐标和型值点三维坐标,计算出各样本船型曲面不同特征区域的特征长度和位置坐标;基于特征长度、位置坐标和船型特征线,利用曲面变形技术对各样本船型曲面构建三维几何变形控制体,得到各样本船型的曲面变形控制参数及其变化范围,并采用拉丁超立方算法对样本船型的曲面变形控制参数变化范围内的多个样本点进行采集,基于采集的多个样本点,利用曲面变形技术对各样本船型进行三维几何变形,得到与曲面变形控制参数一一对应的多个船型样本点三维几何模型;
[0095]
性能预报模型生成模块,基于多个船型样本点三维几何模型,采用船舶cfd技术计算出船舶水动力性能特征参数,将变形后的样本船型各样本点对应的尺度特征参数和曲面变形控制参数作为输入,船舶水动力性能特征参数作为输出,基于bp神经网络方法进行模型训练,得到多个样本船型的性能预报模型;
[0096]
目标函数构建模块,获取目标船型的三维几何模型,并根据船型特征提取模块和船型曲面特征变形模块获得各目标船型的型值点三维坐标和曲面变形控制参数,根据目标船型和样本船型的型值点三维坐标计算出目标船型与样本船型的型值点平均间距和间距最大值,在给定船型特征的限制条件下,根据型值点平均间距和间距最大值,构建目标船型与样本船型特征对比分析的目标函数;
[0097]
参数值获取模块,以目标船型的曲面变形控制参数作为输入,目标函数作为输出,基于遗传算法迭代计算出目标函数的最小值,以筛选出与目标船型相匹配的样本船型(母型船),并获取目标函数最小值时的船型曲面变形控制参数值,将船型曲面变形控制参数值输入与目标船型相匹配的样本船型的性能预报模型中,得到目标船型的水动力性能数据;
[0098]
船型优化模块,以目标船型的曲面变形控制参数作为输入,以性能预报模型输出的水动力性能数据为目标函数作为输出,基于遗传算法对目标船型进行分析和优化,得到目标船型的性能优化方案以及对应的船型曲面变形控制参数组,根据船型曲面变形控制参数组,重复船型曲面特征变形步骤,对目标船型进行三维几何变形,完成目标船型的三维几何模型优化。
[0099]
优选地,尺度特征参数包括船型基本尺度参数和船型全局特征参数,所述船型基本尺度参数包括船舶垂线间长、船舶设计水线长、船舶型宽、船舶设计吃水、螺旋桨轴高和
螺旋桨盘面距艉垂线的距离的任意组合,所述船型全局特征参数包括船舶长宽比、船舶宽度吃水比、方形系数、船舶湿表面积和浮心纵向位置的任意组合。
[0100]
优选地,船型特征线包括船体横剖线、船体纵剖线、水线、中纵剖线、首尾轮廓线、平边线、平底线和船舶横剖面积分布曲线的任意组合。
[0101]
优选地,目标函数构建模块中,根据方形系数和浮心纵向位置计算出目标船型与样本船型的方形系数残差和浮心纵向位置残差,以构建出船型特征限制条件。
[0102]
优选地,参数值获取模块中,在计算目标函数的最小值时,还根据目标船型与样本船型的方形系数残差和浮心纵向位置残差与预设阈值的比对结果判断计算的目标函数的最小值是否有效,若方形系数残差小于第一预设阈值,且浮心纵向位置残差小于第二预设阈值,则计算的目标函数的最小值有效。
[0103]
本发明提供了客观、科学的船型性能预报与优化方法及系统,基于多个样本船型的三维几何模型,采用特定的船型特征提取方法、船型曲面特征变形方法和船型性能预报模型生成方法,训练生成多个船舶性能预报模型,并基于建立的船型三维几何模型的船型特征比较分析目标函数,从众多样本船型中筛选出与目标船型相匹配的母型船,同时构建目标船型预报与优化设计,能够有效扩展船舶性能预报模型所能涵盖的船型范围,提高预报模型的适用范围和应用效果。
[0104]
应当指出,以上所述具体实施方式可以使本领域的技术人员更全面地理解本发明创造,但不以任何方式限制本发明创造。因此,尽管本说明书参照附图和实施例对本发明创造已进行了详细的说明,但是,本领域技术人员应当理解,仍然可以对本发明创造进行修改或者等同替换,总之,一切不脱离本发明创造的精神和范围的技术方案及其改进,其均应涵盖在本发明创造专利的保护范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1