基于矩阵色点识别的构件边缘检测方法与流程
1.本发明涉及一种机器视觉度量方法,尤其涉及一种基于矩阵色点识别的构件边缘检测方法。
背景技术:
2.建筑工程中常常涉及到钢构件或混凝土构件的尺寸测量,以往大多采用传统卷尺、全站仪等设备进行人工测量,这种测量方式的效率相对较低,且无法形成测量数据的自动记录,必须采用人工记录的方式。
3.利用机器视觉进行结构尺寸的度量是一种新的自动化测量方法,但目前大多数机器视觉度量需在待测结构物附近放置标准尺或标靶作为参考物,方可实现待测结构物的实际尺寸识别,这种方式同样存在操作不便的问题。且这种方式大多通过识别待测结构物的灰度值或rgb值进行边缘检测,不仅对光照强度要求高,同时图像分析的计算量相对较大。
技术实现要素:
4.针对现有的利用机器视觉进行结构尺寸度量时,所存在的操作不便、对光照强度要求高、图像分析计算量大等问题,本发明提供了一种基于矩阵色点识别的构件边缘检测方法。
5.为解决以上技术问题,本发明包括如下技术方案:
6.一种基于矩阵色点识别的构件边缘检测方法,包括:
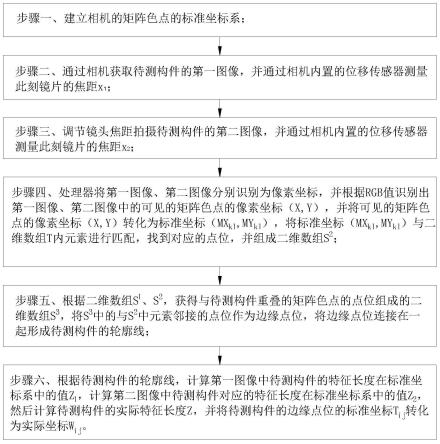
7.步骤一、建立相机的矩阵色点的标准坐标系,所述矩阵色点内置于相机内,且位于光线至感光元器件的路径上;所述矩阵色点为m行、n列,行列间距均为d;所述标准坐标系以矩阵色点的左上角的点位(1,1)标记为原点o,右上角的点位(1,n)作为x轴控制点k1,左下角的点位(m,1)作为y轴控制点k2;所述矩阵色点的点位组成二维数组s1;所述点位的标准坐标值组成二维数组t,t
ij
=(t
ijx
,t
ijy
)=((j-1)d,(i-1)d),其中i=1,2,
…
,m,j=i=1,2,
…
,n;
8.步骤二、通过相机获取待测构件的第一图像,并通过相机内置的位移传感器测量此刻镜片的焦距x1;
9.步骤三、调节镜头焦距拍摄待测构件的第二图像,并通过相机内置的位移传感器测量此刻镜片的焦距x2;
10.步骤四、处理器将第一图像、第二图像分别识别为像素坐标,并根据rgb值识别出第一图像、第二图像中的可见的矩阵色点的像素坐标(x,y),并将可见的矩阵色点的像素坐标(x,y)转化为标准坐标(mx
kl
,my
kl
),将标准坐标(mx
kl
,my
kl
)与二维数组t内元素进行匹配,找到对应的点位,并组成二维数组s2;
11.步骤五、根据二维数组s1、s2,获得与待测构件重叠的矩阵色点的点位组成的二维数组s3,将s3中的与s2中元素邻接的点位作为边缘点位,将边缘点位连接在一起形成待测构件的轮廓线;
12.步骤六、根据待测构件的轮廓线,计算第一图像中待测构件的特征长度在标准坐标系中的值z1,计算第二图像中待测构件对应的特征长度在标准坐标系中的值z2,然后计算待测构件的实际特征长度z,并将待测构件的边缘点位的标准坐标t
ij
转化为实际坐标w
ij
;待测构件的特征长度可以为待测构件的宽度、高度或周长;其中,
[0013][0014][0015]
进一步,步骤四中,所述的将可见的矩阵色点的像素坐标(x,y)转化为标准坐标(mx
kl
,my
kl
),包括如下步骤:
[0016]
a1.建立图像像素坐标系,以图像左上角的第一个像素点原点,以右上角的像素点为x轴控制点,以左下角的像素点为y轴控制点;
[0017]
a2.根据rgb值识别出矩阵色点,其中左上角、右上角、左下角的矩阵色点分为为标准坐标系中的原点o以及控制点k1、k2,像素点坐标分为(xo,yo)、(x
k1
,y
k1
)、(x
k2
,y
k2
);
[0018]
a3.处理器识别出的矩阵色点像素坐标,矩阵色点的任意一点的像素坐标记为(x
kl
,y
kl
),将其转化为(mx
kl
,my
kl
),满足:
[0019][0020][0021]
进一步,当一个矩阵色点显示为多个相邻的像素点时,取中心处或靠近中心处的像素点的坐标作为矩阵色点的像素坐标。
[0022]
进一步,矩阵色点左上角、右上角、左下角的色点的rgb值分别为(255,255,0)、(0,255,0)、(0,255,255),其它色点的rgb值为(255,0,0)。
[0023]
进一步,步骤四中,将标准坐标(mx
kl
,my
kl
)与二维数组t内元素进行匹配的判定规则为:
[0024]
当|mx
kl-t
ijx
|≤
△
d,且|my
kl-t
ijy
|≤
△
d时,判定二者相匹配,其中
△
d为预设值,且
△
d《《d。
[0025]
进一步,
△
d=0.1d。
[0026]
进一步,步骤四中,边缘点位的确定包括如下方法:
[0027]
b1.将二维数组s2中点位的矩阵色点赋值1,将二维数组s3中点位的矩阵色点赋值0,得到赋值后的二维数组
[0028]
b2.将二维数组的行向量分别向上、向下减去相邻的行向量,将列向量分别向左、向右减去相邻的列向量,将值为-1的点位记为索引点位,所有索引点位组成索引向量j,索引向量j中的索引点位均未边缘点位。
[0029]
本发明由于采用以上技术方案,使之与现有技术相比,具有以下的优点和积极效果:本发明提供的基于矩阵色点识别的构件边缘检测方法,通过在相机内设置矩阵色点,然后拍摄两张不同焦距下的矩阵色点与构件图像重叠的图像,然后利用处理器进行像素识别
并根据矩阵色点识别出控制点,找出未与构件重叠的矩阵色点,从而获得与构件重叠的矩阵色点,然后找出边缘点位形成构件轮廓线,根据两次焦距及对应的轮廓线特征长度计算出实际的轮廓线特征长度及边缘点位的实际坐标,根据边缘点位的实际坐标可以得出需要的构件长度、高度、周长、面积等数据。该方法降低了对光照强度的要求,并且图像分析的计算量大大降低,大大提高了测量速度。
附图说明
[0030]
图1为本发明一实施例中的基于矩阵色点识别的构件边缘检测方法的流程图;
[0031]
图2为本发明一实施例中的矩阵色点以及原点、控制点k1、k2的示意图;
[0032]
图3为本发明一实施例中的矩阵色点与待测构件部分重叠的示意图;
[0033]
图4为本发明一实施例中的待测构件轮廓线示意图。
具体实施方式
[0034]
以下结合附图和具体实施例对本发明提供的基于矩阵色点识别的构件边缘检测方法作进一步详细说明。结合下面说明,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0035]
结合图1至图4所示,本实施例提供的基于矩阵色点识别的构件边缘检测方法,包括如下方法:
[0036]
步骤一、建立相机的矩阵色点的标准坐标系(参见图2),所述矩阵色点内置于相机内,且位于光线至感光元器件的路径上;所述矩阵色点为m行、n列,行列间距均为d;所述标准坐标系以矩阵色点的左上角的点位(1,1)标记为原点o,右上角的点位(1,n)作为x轴控制点k1,左下角的点位(m,1)作为y轴控制点k2;所述矩阵色点的点位组成二维数组s1;所述点位的标准坐标值组成二维数组t,t
ij
=(t
ijx
,t
ijy
)=((j-1)d,(i-1)d),其中i=1,2,
…
,m,j=i=1,2,
…
,n。
[0037]
矩阵色点可以设置于平面镜片上,将其设置于相机镜头上或设置于镜头与相机镜片与焦距之间的位置处。矩阵色点可采用现有的激光雕刻或镭射雕刻完成。
[0038]
步骤二、通过相机获取待测构件的第一图像,并通过相机内置的位移传感器测量此刻镜片的焦距x1。所述第一图像为焦距为x1时,矩阵色点图像与构件图像重叠的图像,参见图3。
[0039]
步骤三、调节镜头焦距拍摄待测构件的第二图像,并通过相机内置的位移传感器测量此刻镜片的焦距x2。所述第二图像为焦距为x2时,矩阵色点图像与构件图像重叠的图像。
[0040]
步骤四、处理器将第一图像、第二图像分别识别为像素坐标,并根据rgb值识别出第一图像、第二图像中的可见的矩阵色点的像素坐标(x,y),并将可见的矩阵色点的像素坐标(x,y)转化为标准坐标(mx
kl
,my
kl
),将标准坐标(mx
kl
,my
kl
)与二维数组t内元素进行匹配,找到对应的点位,并组成二维数组s2。
[0041]
处理器可自动识别图片的像素,并将图片的宽度和高度均以像素点表示。处理器可识别需要的像素点,并表示出像素点位,因此可以处理器中的像素为基础建立像素坐标
系。
[0042]
步骤五、根据二维数组s1、s2,获得与待测构件重叠的矩阵色点的点位组成的二维数组s3,将s3中的与s2中元素邻接的点位作为边缘点位,将边缘点位连接在一起形成待测构件的轮廓线。
[0043]
步骤六、根据待测构件的轮廓线,计算第一图像中待测构件的特征长度在标准坐标系中的值z1,计算第二图像中待测构件对应的特征长度在标准坐标系中的值z2,然后计算待测构件的实际特征长度z,并将待测构件的边缘点位的标准坐标t
ij
转化为实际坐标w
ij
;待测构件的特征长度可以为待测构件的宽度、高度或周长;其中,
[0044][0045][0046]
本实施例提供的基于矩阵色点识别的构件边缘检测方法,通过在相机内设置矩阵色点,然后拍摄两张不同焦距下的矩阵色点与构件图像重叠的图像,然后利用处理器进行像素识别并根据矩阵色点识别出控制点,找出未与构件重叠的矩阵色点,从而获得与构件重叠的矩阵色点,然后找出边缘点位形成构件轮廓线,根据两次焦距及对应的轮廓线特征长度计算出实际的轮廓线特征长度及边缘点位的实际坐标,根据边缘点位的实际坐标可以得出需要的构件长度、高度、周长、面积等数据。
[0047]
进一步,步骤四中,所述的将可见的矩阵色点的像素坐标(x,y)转化为标准坐标(mx
kl
,my
kl
),包括如下步骤:
[0048]
a1.建立图像像素坐标系,以图像左上角的第一个像素点原点,以右上角的像素点为x轴控制点,以左下角的像素点为y轴控制点;
[0049]
a2.根据rgb值识别出矩阵色点,其中左上角、右上角、左下角的矩阵色点分为为标准坐标系中的原点o以及控制点k1、k2,像素点坐标分为(xo,yo)、(x
k1
,y
k1
)、(x
k2
,y
k2
);
[0050]
a3.处理器识别出的矩阵色点像素坐标,矩阵色点的任意一点的像素坐标记为(x
kl
,y
kl
),将其转化为(mx
kl
,my
kl
),满足:
[0051][0052][0053]
当一个矩阵色点显示为多个像素点时,通过rgb值识别可能出多个相邻的像素点,取中心处或靠近中心处的像素点的坐标作为矩阵色点的像素坐标。
[0054]
进一步,矩阵色点左上角、右上角、左下角的色点的rgb值分别为(255,255,0)、(0,255,0)、(0,255,255),其它色点的rgb值为(255,0,0)。也就是说,所述标准坐标系中,原点o以及控制点k1、k2的rgb值为黄色、绿色、青色,其它色点的rgb值为红色。处理器可以根据像素的rgb值直接识别出未与构件重叠的色点的像素坐标,通过将像素坐标转化为标准坐标后,可判断出未与构件重叠的色点的点位信息。
[0055]
进一步,步骤四中,将标准坐标(mx
kl
,my
kl
)与二维数组t内元素进行匹配的判定规则为:
[0056]
当|mx
kl-t
ijx
|≤
△
d,且|my
kl-t
ijy
|≤
△
d时,判定二者相匹配,其中
△
d为预设值,且
△
d《《d。本实施例是为了防止像素坐标与标准坐标之间存在误差,导致判定错误的问题,从而提高匹配的准确性。作为举例:
△
d=0.1d、0.05d或0.02d。
[0057]
进一步,步骤四中,边缘点位的确定包括如下方法:
[0058]
b1.将二维数组s2中点位的矩阵色点赋值1,将二维数组s3中点位的矩阵色点赋值0,得到赋值后的二维数组
[0059]
b2.将二维数组的行向量分别向上、向下减去相邻的行向量,将列向量分别向左、向右减去相邻的列向量,将值为-1的点位记为索引点位,所有索引点位组成索引向量j,索引向量j中的索引点位均未边缘点位,参见图4。作为举例,当特征长度z1为轮廓线周长时,以坐标模最小的点位为起点q1,查询距离最短的点位作为其相邻点位q2,计算两者连线长度z1;然后,以q2为参照,向后查询距离最短的点位作为其下一个相邻点位q3,计算两者连线长度z2;以此类推,直至最后一个点位qj,并计算最后连线长度zj;将z1,z2,
…
,zj累加便得出构件边缘周长z1。
[0060]
当然,边缘点位的确定还可以采用相邻像素的色差判定,或通过二维数组s3中元素与二维数组s2中元素的最小距离与间距d之间的关系判定。
[0061]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0062]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1