设备部件的管理方法、装置、设备及计算机可读存储介质与流程
本技术实施例涉及计算机,特别涉及一种设备部件的管理方法、装置、设备及计算机可读存储介质。
背景技术:
1、随着无人驾驶技术的飞速发展,无人驾驶设备也得到了广泛的应用。尤其在配送领域中,采用无人驾驶设备进行物品配送,能够大大提高配送效率。然而,在无人驾驶设备的配送过程中,无人驾驶设备处于不同的运行状态时,无人驾驶设备的部件,如中央处理器、图形处理器的运行情况均是一样的。
2、因此,亟需一种设备部件的管理方法对无人驾驶设备包括的部件进行管理,以使无人驾驶设备的部件在不同的运行状态下的运行情况有所区别,进而提高无人驾驶设备的使用寿命。
技术实现思路
1、本技术实施例提供了一种设备部件的管理方法、装置、设备及计算机可读存储介质,可用于解决相关技术中的问题。所述技术方案如下:
2、第一方面,本技术实施例提供了一种设备部件的管理方法,所述方法包括:
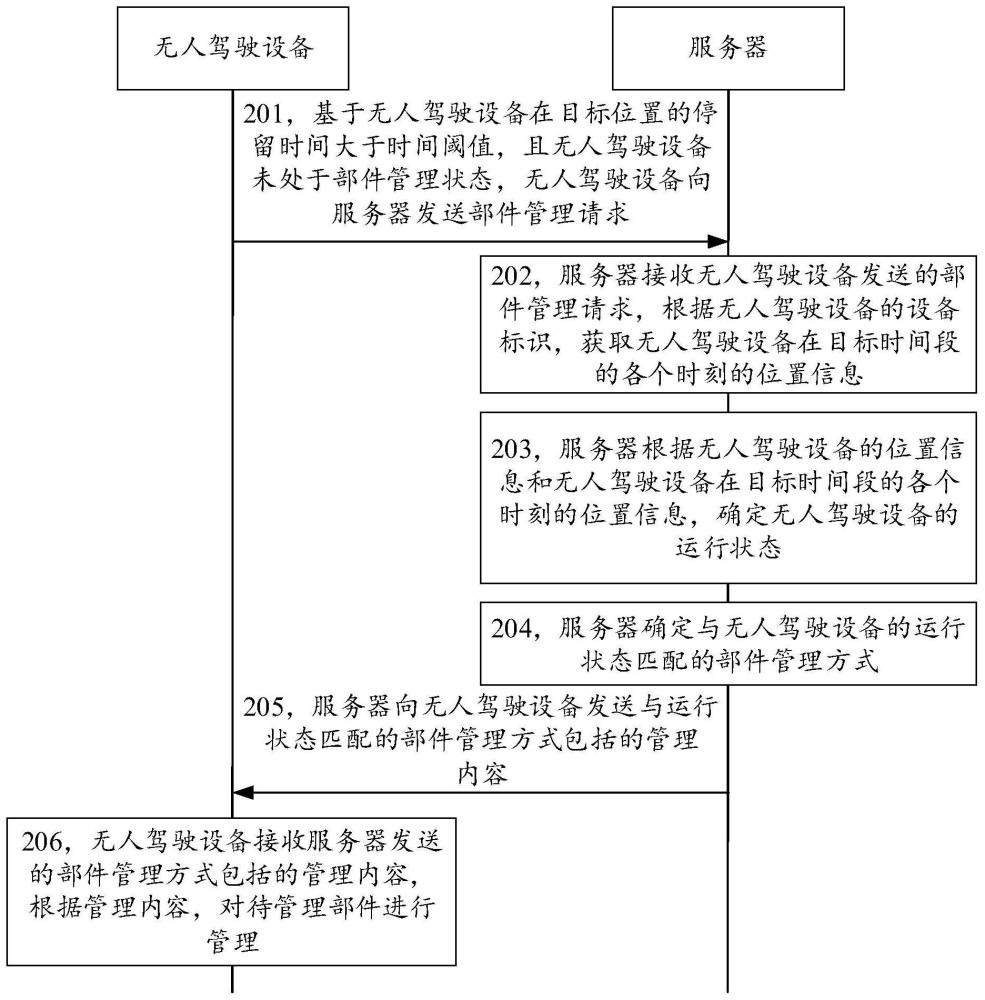
3、接收无人驾驶设备发送的部件管理请求,所述部件管理请求中包括所述无人驾驶设备的设备标识和所述无人驾驶设备的位置信息;
4、根据所述无人驾驶设备的设备标识,获取所述无人驾驶设备在目标时间段的各个时刻的位置信息;
5、根据所述无人驾驶设备的位置信息和所述无人驾驶设备在所述目标时间段的各个时刻的位置信息,确定所述无人驾驶设备的运行状态;
6、向所述无人驾驶设备发送与所述运行状态匹配的部件管理方式包括的管理内容,所述管理内容中包括所述部件管理方式对应的待管理部件和所述待管理部件的管理方式,以用于所述无人驾驶设备根据所述待管理部件的管理方式对所述待管理部件进行管理。
7、在一种可能的实现方式中,所述根据所述无人驾驶设备的位置信息和所述无人驾驶设备在所述目标时间段的各个时刻的位置信息,确定所述无人驾驶设备的运行状态,包括:
8、获取所述无人驾驶设备最近一次上报的目标站点的位置信息;
9、根据所述目标站点的位置信息和所述无人驾驶设备的位置信息,确定所述无人驾驶设备和所述目标站点之间的位置关系;
10、根据所述无人驾驶设备在所述目标时间段的各个时刻的位置信息,确定所述无人驾驶设备的行驶速度;
11、基于所述位置关系指示所述无人驾驶设备位于所述目标站点之内,且所述无人驾驶设备的行驶速度不大于速度阈值,获取所述目标站点的站点类型和所述无人驾驶设备的旅程信息对应的路径长度;
12、根据所述站点类型和所述路径长度,确定所述无人驾驶设备的运行状态。
13、在一种可能的实现方式中,所述运行状态包括空闲状态、等单状态和交接状态;
14、所述根据所述站点类型和所述路径长度,确定所述无人驾驶设备的运行状态,包括:
15、基于所述站点类型指示所述目标站点为具有分拣功能的站点,且所述路径长度不大于长度阈值,确定所述无人驾驶设备的运行状态为所述空闲状态,所述空闲状态指示所述无人驾驶设备停留在所述目标站点之内,且未分配有配送任务;
16、基于所述站点类型指示所述目标站点为具有分拣功能的站点,且所述路径长度大于所述长度阈值,确定所述无人驾驶设备的运行状态为所述等单状态,所述等单状态指示所述无人驾驶设备停留在所述目标站点之内,分配有配送任务,且未开始执行所述配送任务;
17、基于所述站点类型指示所述目标站点不是具有分拣功能的站点,且所述目标站点对应的订单数量满足数量要求,确定所述无人驾驶设备的运行状态为所述交接状态,所述交接状态指示所述无人驾驶设备停留在所述目标站点之内,且所述无人驾驶设备正在执行配送任务。
18、在一种可能的实现方式中,所述方法还包括:
19、确定所述无人驾驶设备在所述目标站点的预计离开时间;
20、将接收到所述部件管理请求的时间和所述预计离开时间之间的时间差值作为部件管理时长;
21、所述向所述无人驾驶设备发送与所述运行状态匹配的部件管理方式包括的管理内容,包括:
22、向所述无人驾驶设备发送与所述运行状态匹配的部件管理方式包括的管理内容和所述部件管理时长,以用于所述无人驾驶设备在所述部件管理时长内根据所述待管理部件的管理方式对所述待管理部件进行管理。
23、在一种可能的实现方式中,所述根据所述目标站点的位置信息和所述无人驾驶设备的位置信息,确定所述无人驾驶设备和所述目标站点之间的位置关系,包括:
24、根据所述目标站点的位置信息,确定目标区域;
25、基于所述无人驾驶设备的位置信息位于所述目标区域之内,确定所述位置关系指示所述无人驾驶设备位于所述目标站点之内。
26、在一种可能的实现方式中,所述根据所述无人驾驶设备在所述目标时间段的各个时刻的位置信息,确定所述无人驾驶设备的行驶速度,包括:
27、确定任意两个时刻对应的位置信息之间的距离和所述任意两个时刻之间的时间差值;
28、根据所述任意两个时刻对应的位置信息之间的距离和所述任意两个时刻之间的时间差值,确定所述无人驾驶设备的行驶速度。
29、在一种可能的实现方式中,所述方法还包括:
30、基于所述位置关系指示所述无人驾驶设备位于所述目标站点之外,和/或,所述无人驾驶设备的行驶速度大于所述速度阈值,向所述无人驾驶设备发送通知消息,所述通知消息用于通知所述无人驾驶设备请求进行部件管理失败。
31、在一种可能的实现方式中,所述无人驾驶设备的运行状态为空闲状态、等单状态和交接状态中的任一种;
32、基于所述无人驾驶设备的运行状态为所述空闲状态,与所述空闲状态匹配的部件管理方式包括的管理内容为将中央处理器cpu的主频频率降低至第一数值、将图形处理器gpu的主频频率降低至第二数值、将激光雷达的扫描频率降低至第三数值、关闭感知功能、关闭预测功能、关闭规划与控制功能、关闭激光雷达的数据记录功能和关闭摄像装置的数据记录功能;
33、基于所述无人驾驶设备的运行状态为所述等单状态,与所述等单状态匹配的部件管理方式包括的管理内容为将所述cpu的主频频率降低至第四数值、将所述gpu的主频频率降低至第五数值、将所述激光雷达的扫描频率降低至第六数值、关闭所述感知功能、关闭所述预测功能、关闭所述规划与控制功能、关闭所述激光雷达的数据记录功能、将所述摄像装置的数据记录的分辨率降低至第七数值;
34、基于所述无人驾驶设备的运行状态为所述交接状态,与所述交接状态匹配的部件管理方式包括的管理内容为将所述cpu的主频频率降低至第八数值、将所述gpu的主频频率降低至第九数值、将所述激光雷达的扫描频率降低至第十数值、将所述激光雷达的数据记录的分辨率降低至第十一数值和将所述摄像装置的数据记录的分辨率降低至第十二数值。
35、第二方面,本技术实施例提供了一种设备部件的管理方法,所述方法包括:
36、基于无人驾驶设备在目标位置的停留时间大于时间阈值,且所述无人驾驶设备未处于部件管理状态,向服务器发送部件管理请求,所述部件管理请求中包括所述无人驾驶设备的设备标识和所述无人驾驶设备的位置信息;
37、接收所述服务器发送的与所述无人驾驶设备的运行状态匹配的部件管理方式包括的管理内容,所述管理内容中包括所述部件管理方式对应的待管理部件以及所述待管理部件的管理方式;
38、根据所述管理内容,对所述待管理部件进行管理。
39、在一种可能的实现方式中,所述方法还包括:
40、接收所述服务器发送的部件管理时长;
41、所述根据所述管理内容,对所述待管理部件进行管理,包括:
42、按照所述部件管理时长,根据所述管理内容,对所述待管理部件进行管理。
43、第三方面,本技术实施例提供了一种设备部件的管理装置,所述装置包括:
44、接收模块,用于接收无人驾驶设备发送的部件管理请求,所述部件管理请求中包括所述无人驾驶设备的设备标识和所述无人驾驶设备的位置信息;
45、获取模块,用于根据所述无人驾驶设备的设备标识,获取所述无人驾驶设备在目标时间段的各个时刻的位置信息;
46、确定模块,用于根据所述无人驾驶设备的位置信息和所述无人驾驶设备在所述目标时间段的各个时刻的位置信息,确定所述无人驾驶设备的运行状态;
47、发送模块,用于向所述无人驾驶设备发送与所述运行状态匹配的部件管理方式包括的管理内容,所述管理内容中包括所述部件管理方式对应的待管理部件和所述待管理部件的管理方式,以用于所述无人驾驶设备根据所述待管理部件的管理方式对所述待管理部件进行管理。
48、在一种可能的实现方式中,所述确定模块,用于获取所述无人驾驶设备最近一次上报的目标站点的位置信息;
49、根据所述目标站点的位置信息和所述无人驾驶设备的位置信息,确定所述无人驾驶设备和所述目标站点之间的位置关系;
50、根据所述无人驾驶设备在所述目标时间段的各个时刻的位置信息,确定所述无人驾驶设备的行驶速度;
51、基于所述位置关系指示所述无人驾驶设备位于所述目标站点之内,且所述无人驾驶设备的行驶速度不大于速度阈值,获取所述目标站点的站点类型和所述无人驾驶设备的旅程信息对应的路径长度;
52、根据所述站点类型和所述路径长度,确定所述无人驾驶设备的运行状态。
53、在一种可能的实现方式中,所述运行状态包括空闲状态、等单状态和交接状态;
54、所述确定模块,用于基于所述站点类型指示所述目标站点为具有分拣功能的站点,且所述路径长度不大于长度阈值,确定所述无人驾驶设备的运行状态为所述空闲状态,所述空闲状态指示所述无人驾驶设备停留在所述目标站点之内,且未分配有配送任务;
55、基于所述站点类型指示所述目标站点为具有分拣功能的站点,且所述路径长度大于所述长度阈值,确定所述无人驾驶设备的运行状态为所述等单状态,所述等单状态指示所述无人驾驶设备停留在所述目标站点之内,分配有配送任务,且未开始执行所述配送任务;
56、基于所述站点类型指示所述目标站点不是具有分拣功能的站点,且所述目标站点对应的订单数量满足数量要求,确定所述无人驾驶设备的运行状态为所述交接状态,所述交接状态指示所述无人驾驶设备停留在所述目标站点之内,且所述无人驾驶设备正在执行配送任务。
57、在一种可能的实现方式中,所述确定模块,还用于确定所述无人驾驶设备在所述目标站点的预计离开时间;
58、将接收到所述部件管理请求的时间和所述预计离开时间之间的时间差值作为部件管理时长;
59、所述发送模块,用于向所述无人驾驶设备发送与所述运行状态匹配的部件管理方式包括的管理内容和所述部件管理时长,以用于所述无人驾驶设备在所述部件管理时长内根据所述待管理部件的管理方式对所述待管理部件进行管理。
60、在一种可能的实现方式中,所述确定模块,用于根据所述目标站点的位置信息,确定目标区域;
61、基于所述无人驾驶设备的位置信息位于所述目标区域之内,确定所述位置关系指示所述无人驾驶设备位于所述目标站点之内。
62、在一种可能的实现方式中,所述确定模块,用于确定任意两个时刻对应的位置信息之间的距离和所述任意两个时刻之间的时间差值;
63、根据所述任意两个时刻对应的位置信息之间的距离和所述任意两个时刻之间的时间差值,确定所述无人驾驶设备的行驶速度。
64、在一种可能的实现方式中,所述发送模块,还用于基于所述位置关系指示所述无人驾驶设备位于所述目标站点之外,和/或,所述无人驾驶设备的行驶速度大于所述速度阈值,向所述无人驾驶设备发送通知消息,所述通知消息用于通知所述无人驾驶设备请求进行部件管理失败。
65、在一种可能的实现方式中,所述无人驾驶设备的运行状态为空闲状态、等单状态和交接状态中的任一种;
66、基于所述无人驾驶设备的运行状态为所述空闲状态,与所述空闲状态匹配的部件管理方式包括的管理内容为将中央处理器cpu的主频频率降低至第一数值、将图形处理器gpu的主频频率降低至第二数值、将激光雷达的扫描频率降低至第三数值、关闭感知功能、关闭预测功能、关闭规划与控制功能、关闭激光雷达的数据记录功能和关闭摄像装置的数据记录功能;
67、基于所述无人驾驶设备的运行状态为所述等单状态,与所述等单状态匹配的部件管理方式包括的管理内容为将所述cpu的主频频率降低至第四数值、将所述gpu的主频频率降低至第五数值、将所述激光雷达的扫描频率降低至第六数值、关闭所述感知功能、关闭所述预测功能、关闭所述规划与控制功能、关闭所述激光雷达的数据记录功能、将所述摄像装置的数据记录的分辨率降低至第七数值;
68、基于所述无人驾驶设备的运行状态为所述交接状态,与所述交接状态匹配的部件管理方式包括的管理内容为将所述cpu的主频频率降低至第八数值、将所述gpu的主频频率降低至第九数值、将所述激光雷达的扫描频率降低至第十数值、将所述激光雷达的数据记录的分辨率降低至第十一数值和将所述摄像装置的数据记录的分辨率降低至第十二数值。
69、第四方面,本技术实施例提供了一种设备部件的管理装置,所述装置包括:
70、发送模块,用于基于无人驾驶设备在目标位置的停留时间大于时间阈值,且所述无人驾驶设备未处于部件管理状态,向服务器发送部件管理请求,所述部件管理请求中包括所述无人驾驶设备的设备标识和所述无人驾驶设备的位置信息;
71、接收模块,用于接收所述服务器发送的与所述无人驾驶设备的运行状态匹配的部件管理方式包括的管理内容,所述管理内容中包括所述部件管理方式对应的待管理部件以及所述待管理部件的管理方式;
72、管理模块,用于根据所述管理内容,对所述待管理部件进行管理。
73、在一种可能的实现方式中,所述接收模块,还用于接收所述服务器发送的部件管理时长;
74、所述管理模块,用于按照所述部件管理时长,根据所述管理内容,对所述待管理部件进行管理。
75、第五方面,本技术实施例提供了一种服务器,所述服务器包括处理器和存储器,所述存储器中存储有至少一条程序代码,所述至少一条程序代码由所述处理器加载并执行,以使服务器实现上述第一方面所述的设备部件的管理方法。
76、第六方面,本技术实施例提供了一种无人驾驶设备,所述无人驾驶设备包括处理器和存储器,所述存储器中存储有至少一条程序代码,所述至少一条程序代码由所述处理器加载并执行,以使无人驾驶设备实现上述第二方面所述的设备部件的管理方法。
77、第七方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以使计算机实现上述任一所述的设备部件的管理方法。
78、第八方面,还提供了一种计算机程序或计算机程序产品,所述计算机程序或计算机程序产品中存储有至少一条计算机指令,所述至少一条计算机指令由处理器加载并执行,以使计算机实现上述任一种设备部件的管理方法。
79、本技术实施例提供的技术方案至少带来如下有益效果:
80、本技术实施例提供的技术方案根据无人驾驶设备的设备标识和位置信息,确定无人驾驶设备和目标站点的位置关系以及无人驾驶设备的行驶速度,在无人驾驶设备和目标站点的位置关系满足要求且无人驾驶设备的行驶速度满足要求的情况下,确定无人驾驶设备的运行状态,进而按照无人驾驶设备的运行状态确定部件管理方式,使得确定的部件管理方式与无人驾驶设备的匹配度较高。无人驾驶设备根据该部件管理方式包括的管理内容对无人驾驶设备中待管理部件进行管理,能够提高无人驾驶设备的有效行驶里程、有效存储数据占比、降低无人驾驶设备的能耗,进而能够提高无人驾驶设备的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!