基于点云法向量差的大型风电叶片飞边特征提取方法
1.本发明属于三维点云技术领域,涉及点云的特征提取方法,尤其是一种基于法向量差的大型风电叶片的飞边提取方法。
背景技术:
2.我国东南沿海地区具有丰富的海上风能资源,十分有利于海上风电场的建设。而建设海上风电场需要有一定规模数量的风电机组和输电系统,其中风电机组是将风能转化为电能的关键设备。而叶片是风机最重要的部件,风机叶片的制造成本约为风机生产成本的15-20%。
3.叶片生产流程分为成型阶段和后处理阶段,成型阶段向模具中灌注材料,并进行合模。后处理阶段主要对脱模后的叶片进行处理。脱模后首先需要切除飞边,并对飞边进行打磨,该工艺目前主要由人工进行操作,工作环境恶劣,操作难度高,是风电叶片自动化加工需要解决的难题之一。
4.三维点云技术已经广泛应用于测绘、智能驾驶、逆向工程等领域。在大型风电叶片的表面加工领域,也引入了三维点云技术。飞边特征位于风电叶片曲面上,脱模后的叶片在经过飞边切割后,其特征仅突出叶片约1~2mm,宽度为15mm左右,常见叶片截面宽高均在1m以上。同时叶片具有复杂的三维表面,放置时往往会发生较大变形和扭转,因此在获取该工序后叶片的三维点云后,叶片飞边特征的点云提取成为了一大难题,而目前对风电叶片飞边特征的提取少有研究。
技术实现要素:
5.本发明的目的在于解决现有技术风电叶片飞边特征点云提取困难的问题,提供一种基于点云法线微分的大型风电叶片飞边特征提取方法,便于风电叶片飞边特征的点云提取,提取飞边特征提取效果好,具有较强的鲁棒性。
6.为了实现上述目的,本发明所采用的技术方案如下:
7.一种基于点云法向量差的大型风电叶片飞边特征提取方法,包括以下步骤:
8.s1.点云预处理:通过rgbd相机获取风电叶片的叶片点云数据,对叶片点云数据进行初次滤波,获得预处理后的叶片点云数据;
9.s2.基于法向量差的特征分割:计算叶片的点云分辨率,根据点云分辨率确定大小两个支撑半径,计算两个支撑半径下的法向量,根据两个支撑半径的法向量差进行条件滤波,去除叶片点云中小于设定阈值的点,将飞边特征与叶片点云分离;
10.s3.聚类分割:对叶片点云数据进行再次滤波,通过聚类分割彻底分离飞边与叶片,获得叶片飞边的特征点云。
11.进一步地,初次滤波包括直通滤波和统计滤波,直通滤波用于根据rgbd相机与风电叶片的距离去除无关区域的点,统计滤波用于去除叶片点云中的无关点和噪点。
12.进一步地,统计滤波的过程为:
13.通过计算点云中每个点到其n个邻近点的距离li,其中i=1,2,3
……
n,,再根据距离li计算平均距离和平均距离值的方差σ,计算结果符合高斯分布统计滤波去除距离li在范围外的点,其中m为设置的值,通过改变m的大小可以改变滤波效果。
14.进一步地,点云分辨率的计算方法为,遍历点云数据中的每个点,找到每个点距离最近的点,并求两点之间的距离;将所有的距离累加,并除以点云数据中点的数量。
15.进一步地,法向量计算采用主成分分析法,并引入视点用于确定法向量方向,视点默认为坐标系原点,视点也可单独设置为坐标系其它点。
16.进一步地,对点云中点p,先计算点p支撑半径下的区域质心,区域质心的公式为:
[0017][0018]
式中,k表示点p支撑半径内点的数量,为该区域的三维质心。
[0019]
进一步地,根据点p支撑半径下的区域质心建立协方差矩阵,协方差矩阵的公式为:
[0020][0021]
式中,c表示协方差矩阵。
[0022]
进一步地,根据计算得到的协方差矩阵c,计算协方差矩阵c的特征值和特征向量,特征值和特征向量的公式为:
[0023][0024]
式中,λi表示协方差矩阵的第i个特征值,表示协方差矩阵的第j个特征向量。
[0025]
进一步地,根据特征值和特征向量的公式,最小特征值对应的特征向量为点p处的法向量,法向量需要满足公式:
[0026][0027]
式中,为法向量,v
p
为视点。
[0028]
进一步地,点云中任意点p的法向量差为:
[0029][0030]
式中,为大支撑半径下点p的法向量,为小支撑半径下点p的法向量。
[0031]
与现有技术相比,本发明可以实现庞大风电叶片上飞边这一相对较小特征的提取,同时可以快速部署本发明基于点云法向量差的大型风电叶片飞边特征提取方法,无需依赖大量数据进行模型训练;本发明提取飞边特征提取效果好,飞边特征的提取效果不受到扫描角度、采样噪点等影响,具有较强的鲁棒性。
附图说明
[0032]
图1为风电叶片的飞边特征的示意图。
[0033]
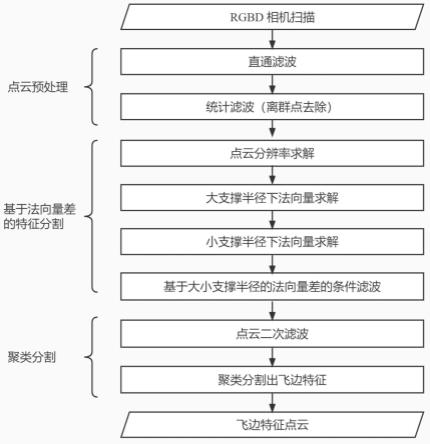
图2为本发明基于点云法向量差的大型风电叶片飞边特征提取方法的流程示意图。
[0034]
图3为法向量差在飞边特征处的示意图。
[0035]
图4为分割风电叶片飞边特征的示意图,其中,a为原始点云图,b为直通滤波后的效果图,c为统计滤波后的效果图,d为法向量差特征计算结果示意图,e为条件滤波后的效果图,f为聚类效果图。
[0036]
图5为分割出的纯净的风电叶片飞边特征点云示意图,其中,a为侧面视角的飞边特征点云示意图,b为正面视角的飞边特征点云示意图。
具体实施方式
[0037]
下面结合附图和具体实施例对本发明基于点云法向量差的大型风电叶片飞边特征提取方法作进一步说明。
[0038]
风电叶片截面宽和高均超过1米,脱模后的叶片首先需要进行飞边切割,切割完成后残留飞边特征位于该截面前端和尾端上。请参阅图1,残留飞边特征凸出叶片表面大约2mm,飞边宽15mm左右,相对叶片整体,残留飞边特征不够明显,视觉识别难度非常高。因此,亟需一种有效的飞边特征提取方法对叶片飞边特征的点云进行提取。
[0039]
请参阅图2,针对叶片飞边特征提取困难的问题,本发明公开了一种基于点云法向量差的大型风电叶片飞边特征提取方法,包括以下步骤:
[0040]
s1.点云预处理:通过rgbd相机获取风电叶片的叶片点云数据,对叶片点云数据进行初次滤波,获得预处理后的叶片点云数据。
[0041]
s2.基于法向量差的特征分割:计算叶片的点云分辨率,根据点云分辨率确定大小两个支撑半径,计算两个支撑半径下的法向量,根据两个支撑半径的法向量差进行条件滤波,去除叶片点云中小于设定阈值的点,将飞边特征与叶片点云分离。
[0042]
s3.聚类分割:对叶片点云数据进行再次滤波,通过聚类分割彻底分离飞边与叶片,获得叶片飞边的特征点云。
[0043]
步骤s1中,初次滤波包括直通滤波和统计滤波,直通滤波用于根据rgbd相机与风电叶片的距离去除无关区域的点,统计滤波用于去除叶片点云中的无关点和噪点。对叶片点云数据进行初次滤波时,先根据rgbd相机与待测风电叶片的距离进行直通滤波,将超出距离的点去除,随后使用统计滤波去除叶片点云中的无效点和噪点。
[0044]
统计滤波通过计算点云中每个点到其n个邻近点的距离li,其中i=1,2,3
……
n,,再根据距离li计算平均距离和平均距离值的方差σ,计算结果符合高斯分布统计滤波去除距离li在范围外的点,其中m为设置的值,通过改变m的大小可以改变滤波效果。m=1,2,3,为得到较好的滤波效果,m可以取1。
[0045]
步骤s2中,计算预处理后的叶片点云数据的点云分辨率,并确定一大一小两个法向量计算的支撑半径。基于大小支撑半径计算法向量,并计算大小支撑半径的法向量差特征,并依据计算结果进行条件滤波。
[0046]
点云分辨率的计算方法为,遍历点云数据中的每个点,找到每个点距离最近的点,并求两点之间的距离;将所有的距离累加,并除以点云数据中点的数量。大小支撑半径可以根据点云分辨率确定,大支撑半径一般为小支撑半径的2倍。
[0047]
法向量的计算采用主成分分析法(pca),并引入视点用于确定法向量方向,视点默认为坐标系原点,视点也可单独设置为坐标系其它点。
[0048]
对点云中点p,先计算点p支撑半径下的区域质心,区域质心的公式为:
[0049][0050]
式中,k表示点p支撑半径内点的数量,为该区域的三维质心。
[0051]
根据点p支撑半径下的区域质心建立协方差矩阵,协方差矩阵的公式为:
[0052][0053]
式中,c表示协方差矩阵。
[0054]
根据计算得到的协方差矩阵c,计算协方差矩阵c的特征值和特征向量,特征值和特征向量的公式为:
[0055][0056]
式中,λi表示协方差矩阵的第i个特征值,表示协方差矩阵的第j个特征向量。
[0057]
根据特征值和特征向量的公式,最小特征值对应的特征向量为点p处的法向量,由于计算的法向量不具备唯一性,因此引入视点以解决该问题,法向量需要满足公式:
[0058][0059]
式中,为法向量,v
p
为视点。
[0060]
点云中任意点p的法向量差为:
[0061][0062]
式中,为大支撑半径下点p的法向量,为小支撑半径下点p的法向量。
[0063]
请参阅图3,从图3中可以看出,大支撑半径下法向量的计算受到小尺度结构的影响较小,而小支撑半径下法向量的计算容易受到小尺度结构的影响,如果两种支撑半径取值下算得的法向量变化较小,则曲面结构不会发生较大改变。而法向量变化较大,则曲面结构会发生较大的变化。
[0064]
根据计算得到大小支撑半径下的法向量差,设置阈值进行条件滤波,可以将飞边特征与叶片曲面点云完全分离。风电叶片飞边分割阈值一般小于0.1。根据法向量差特征筛选曲面上凸起位置,或曲率发生突变的位置,并去除该部分的点,将飞边特征与叶片曲面完全分离。
[0065]
步骤s3中,采用聚类分割,通过设置搜索半径、聚类最小点数和最大点数将飞边点
云与叶片曲面彻底分割,得到纯净的飞边特征的点云。
[0066]
请参阅图4和图5,本发明基于点云法向量差的大型风电叶片飞边特征提取方法,以rgbd相机扫描的风电叶片模型为实验对象,实验步骤如下:
[0067]
1、对rgbd相机扫描到的点云进行预处理,采取直通滤波和统计滤波去除噪点和无关点,得到纯净的风电叶片表面点云。
[0068]
1.1、相机距离模型600mm,采集到的原始点云数据如图4a所示,因本实验采用的rgbd相机存在300mm的视觉盲区,直通滤波设置在z方向去除离相机光心300mm~600mm以外的数据。同时由于采集支架靠墙,墙面距离光心160mm,因此需要在x方向去除大于160mm的点。直通滤波效果如图4b所示。
[0069]
1.2、统计滤波设置考虑的最近邻近点个数为50个,σ=1。滤波效果如图4c所示。
[0070]
1.3、经过预处理后点云数据点的数量为278378。
[0071]
2、计算点云分辨率,确定大小支撑半径,计算大小支撑半径下点云的法向量,计算法向量差特征,并设置阈值进行条件滤波。
[0072]
2.1、实验点云的分辨率为0.471509,小支撑半径取分辨率的10倍,为4.71509。大支撑半径为小支撑半径的两倍,为9.43018。
[0073]
2.2、法向量差特征计算完毕后,计算结果如图4d所示。随后利用条件滤波去除小于阈值的点,本次实验取0.056。效果如图4e所示。
[0074]
3、根据前序计算结果进行聚类分割,得到纯净的飞边特征点云,聚类效果如图4f所示。
[0075]
3.1、聚类分割前再进行一次统计滤波,去除无关点。
[0076]
3.2、实验聚类的搜索半径为1,聚类最低数为2000,聚类最高数为60000。
[0077]
3.3、分割得到的飞边点云如图5所示,图5a为侧面视角的飞边特征点云图,图5b为正面视角的飞边特征点云图。
[0078]
综上所述,本发明可以实现庞大风电叶片上飞边这一相对较小特征的提取,同时可以快速部署本发明基于点云法向量差的大型风电叶片飞边特征提取方法,无需依赖大量数据进行模型训练;本发明提取飞边特征提取效果好,飞边特征的提取效果不受到扫描角度、采样噪点等影响,具有较强的鲁棒性。
[0079]
上述说明是针对本发明较佳可行实施例的详细说明,但实施例并非用以限定本发明的专利申请范围,凡本发明所揭示的技术精神下所完成的同等变化或修饰变更,均应属于本发明所涵盖专利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1