一种任意点三维坐标的计算方法与流程
1.本技术涉及一种任意点三维坐标的计算方法及处理器,属应用科学领域,交叉学科研究领域、工程技术研究领域、应用数学研究领域、信息科学研究领域等,具体涉及工程测量领域子项线路与桥隧工程测量技术研究、建设工程测量检测技术研究、量子数学模型和算法研究、计算几何学应用研究、代数域论应用研究、信息数据化研究、数据处理和传输等领域。
背景技术:
2.现有线路与桥隧测量算法的数学模型是“将直线段视为一种特殊的曲线元,直线段曲线元的转角为0
°
,对于非直线段的曲线元,其转角大于0
°”
。
3.与本发明所涉及专业技术范围基本相同的专著是,湖南交通职业学院王中伟教授编著的《casiofx-5800p计算器与道路施工放样程序》,在以下相同专业技术范围内,其观点和方法包括:
4.200:线元要素与坐标的统一计算公式(p106~3.3.3);路线坐标积分计算的数值算法(p110~3.3.4);
5.300:道路中线外一点的坐标计算(p114~3.4.1);
6.400:由路线外一点反求桩号的计算(p116~3.4.2):逐步趋近的算法;
7.500:纵断面计算:中桩坐标与设计高程计算模式(p196~6.3.1);
8.600:横断面计算:路基填挖放样模式(p207~6.3.4)。
9.与本发明的部分内容相同的发明专利包括,申请公布号cn112651068a,申请公布日2021.04.13,一种计算各类线路任意线元坐标的方法;申请公布号cn113934974a,申请公布日2022.01.14,一种路线上任意桩号处的坐标的计算方法;申请公布号cn112733223a,申请公布日2021.04.30,一种已知坐标点反算对应线路里程和偏距的方法。
10.根据目前现有线路与桥隧测量算法基本模型产生的以上计算方法都有局限性,有时因为没有计算结果而造成死循环,所以无法保证全部测量计算成果的准确率为百分之百;现有测量计算主要依赖测量工程师个人的经验和技术水平;为避免测量计算工作出现重大偏差,目前制度和行业规范要求的方法是:实行核对制度,即项目部测量工程师报验,第三方测量工程师复核。因此,有必要提高测量计算的可靠性、准确性和速度,创新一个全部测量计算成果的准确率为百分之百的测量计算方法,建立一个测量检测标准,以便对建设工程勘察设计和施工过程实施有效的、可靠的测量检测。
技术实现要素:
11.本技术实施例的目的是提供一种任意点三维坐标的计算方法及处理器。
12.本发明是开拓性发明,是一种全新的技术方案,在技术史上未曾有过先例,同现有技术相比,具有突出的实质性特点和显著的进步,发明的创造性包括:本发明采用交叉学科研究方法,将工程勘察设计、施工测量和测量检测过程中需要解决的问题归纳为一个计算
任意点三维坐标的数学问题,然后利用数学研究手段,创新模型和算法,再结合计算机编程技术,计算任意点三维坐标值,最终应用在工程勘察设计、施工测量和测量检测过程中;本发明创立了点域数学模型、垂足域数学模型、量子数学模型、异强坐标系数学模型,实现了实际宏观世界与虚拟量子微观世界之间的互相穿越;本发明的模型和算法与现有技术的模型和算法完全相反,认为曲线是特殊的直线,而现有技术的模型和算法则认为直线是特殊的曲线;本发明应用计算几何学原理,用三角函数和加减乘除四则混合运算方式,取代现有技术的积分计算方法,简便、快捷、准确地计算直线、圆曲线和缓和曲线上任意点的平面坐标,反算并确定已知坐标值任意点对应的垂足中桩以及偏距。
13.为了实现上述目的,本技术第一方面提供一种任意点三维坐标的计算方法,包括以下步骤:
14.步骤100:建立数据库,发明异强坐标系,并按异强坐标系的规定,输入设计图纸中已有的、与任意点p对应的辅助性参数k
p
、j
p
、h
p
、l
p
,其中k
p
是任意中桩,是描述实体工程中心位置的数据;j
p
是交角,是描述实体工程几何外形的数据;h
p
、l
p
是工程细部尺寸数据;
15.步骤200:根据任意中桩kp数值和平曲线要素子数据库的数据,计算任意中桩的平面坐标值k
p
(xk、yk)和切线方位角qie-ang1;
16.步骤300:根据数据j
p
、h
p
、l
p
、xk、yk,计算任意点的平面坐标值p(x
p
,y
p
);
17.步骤400:反算并确定已知坐标值任意点p(x
p
,y
p
)对应的垂足中桩a以及偏距ap;
18.步骤500:纵断面计算:根据竖曲线要素子数据库的数据,计算垂足中桩a的高程z1;
19.步骤600:横断面计算:根据横断面坡度、宽度子数据库的数据与垂足中桩a的高程z1,计算任意点的高程z
p
;
20.步骤700:任意点的三维坐标值是p(x
p
,y
p
,z
p
)。
21.在本技术的实施例中,计算方法是根据线路与桥隧测量的各种特定条件和场景、结合数据的几何形态发明的、有针对性的计算方法,特点包括:发明异强坐标系模型和算法,直接计算基于路线整体坐标系的三维坐标值;发明一种量子数学模型和算法,直接反算和确定已知坐标值任意点对应的垂足中桩及偏距;计算方法适用于路线平曲线的直线、圆曲线和缓和曲线三种线形元素;计算方法适用于任意转角的圆曲线和各种类型的缓和曲线;计算方法适用于道路、桥梁、涵洞、隧道上的任意点。
22.在本技术的实施例中,计算方法的数据库包括平曲线要素子数据库,竖曲线要素子数据库和横断面坡度、宽度子数据库。
23.本技术第二方面提供一种点域模型和算法,用于计算任意中桩的平面坐标,点域是点的集合,是实数域,点域内的所有点都有共性:有一个共同的中桩桩号,相同的平面坐标值,相同的切线方位角;路线平曲线是一个由有限数量点域组成的串珠,是一条特殊的直线,箭直的转角为0
°
,弯弓、弦月的转角不为0
°
;路线平曲线的三种形状弯弓、弦月和箭直,分别对应缓和曲线、圆曲线和直线三种线形元素;点域模型和算法,首先用局部平面坐标系计算缓和曲线、圆曲线的弦长,用局部极坐标系计算缓和曲线、圆曲线的转角,然后统一按极坐标法,计算直线、圆曲线和缓和曲线任意中桩的平面坐标。
24.本技术第三方面提供一种任意中桩平面坐标的计算方法,步骤200包括以下步骤:
25.步骤201:以一个已知中桩k0为原点,以已知中桩k0切线方向为x轴,以法线方向为y
轴,建立局部平面坐标系,计算任意中桩在局部平面坐标系中的x、y值;
26.步骤202:以已知中桩k0的切线方向为起始边,建立局部极坐标系,计算任意中桩在局部极坐标系中的转角和弦切角;
27.步骤203:计算任意中桩的平面坐标和切线方位角。
28.本技术第四方面提供一种异强坐标系数学模型和算法,用于计算任意点的平面坐标或三维坐标,包括:异强坐标系以中桩k为原点,以路线切线方向或结构物的短轴线方向为h轴,以长轴线方向为l轴,h轴与l轴的交角为j,异强坐标系是平面斜交坐标系;异强坐标系是以数形结合法为基础、就地取材的、自定义工程坐标系;异强坐标系数学模型是一个综合模型,是对道路、桥梁、通涵、隧道中常用数学模型的概括和总结,包容局部平面坐标系和局部极坐标系;当j为90
°
时,异强坐标系等同于局部平面坐标系;当h或l值为0时,异强坐标系等同于局部极坐标系;异强坐标系数学模型和算法,属于计算几何学范畴,即模型总是收敛的,且不需要进行训练、学习,而是直接利用平面几何学公式计算数学模型的结果。
29.本技术第五方面提供一种任意点平面坐标的计算方法,从异强坐标系,转换至路线整体坐标系,直接计算任意点的平面坐标值。
30.本技术第六方面提供一种量子数学模型和算法,模型和算法具有开拓性,包括:垂足域是点的集合,是实数域;垂足,平面解析几何学中两条直线正交于该点,交角≡90
°
整,是一个没有大小的点,是垂足域中的一个特殊点,垂足域中所有的点都和垂足一样,满足近似垂直条件要求;量子垂足域碰撞模型是一种量子数学模型,也是一种平面几何模型,k0是所研究路段已知坐标值的任意中桩,是已知点,连结已知坐标值的任意中桩k0和已知坐标值任意点p,得到已知线段pk0,然后在已知坐标值任意中桩k0切线方向上作已知坐标值任意点p的垂足b0,得到异强直角三角形pk0b0;在异强直角三角形中,pk0是异强斜边,pb0是异强正弦边,k0b0是异强余弦边,α0是异强斜边pk0与任意中桩k0切线方向的夹角;然后以量子点域k0为标准,以α0余弦值指引的方向:当α0余弦值为正则向大桩号方向找到与量子点域k0是碰撞关系的量子点域k1,当α0余弦值为负则向小桩号方向找到与量子点域k0是碰撞关系的量子点域k1,建立异强直角三角形pk1b1;α1是异强斜边pk1与中桩k1切线方向的夹角;按照以上方法,对于路线平曲线上点kn,都依次建立异强直角三角形pk
nbn
,得到夹角αn,直到αn满足垂直条件要求为止;量子几何模型始终是收敛的:αn是判定垂直的定性指标,当αn的值与垂直条件差值小于1
°
时,其对应的量子点域kn处于核心区;在核心区内,αn逐渐趋近垂直条件,量子点域kn与量子垂足域a发生碰撞或相交,当αn的值满足垂直条件时,量子点域kn与量子垂足域a相交或重合,训练结束;异强余弦边yq是判定垂足的定量指标,在核心区外的异强余弦边yq绝对值较大,在核心区内,异强余弦边yq绝对值则较小;随着nn逐渐趋近垂直条件,异强余弦边yq的值达到量子级,并逐渐趋近0,中桩kn也逐渐趋近垂足中桩a的值,训练结束;学习率:将点域作为一个学习率,模型收敛的速度很慢;异强余弦边,是一个动态的值,是非常合适的学习率取值,在核心区外的异强余弦边绝对值较大,模型收敛的速度很快;在核心区内,异强余弦边绝对值则较小,模型收敛的速度会变慢;在核心区的中心地段,模型收敛的速度会变得越来越慢,随着αn逐渐趋近垂直条件,异强余弦边的值达到量子级,并逐渐趋近0;总体而言,选择异强余弦边值作学习率取值,模型收敛的速度由快变慢,结果也特别理想;算法:首先确定计算精度,工程测量计算精度为10-4
m,当满足条件异强余弦边小于10-4
m时,则垂足中桩a的值等于中桩kn的值,偏距ap的值等于异强正弦边的值。
31.本技术第七方面提供一种反算并确定任意点已知坐标值对应的垂足中桩及偏距的计算方法,其特征在于,步骤400包括以下步骤:
32.步骤401:确定工程测量计算精度10-4
m;
33.步骤402:k0是所研究路段已知坐标值的任意中桩,是已知点,连结已知坐标值的任意中桩k0和已知坐标值任意点p,得到已知线段pk0,然后在已知坐标值任意中桩k0切线方向上作已知坐标值任意点p的垂足b0,得到异强直角三角形pk0b0;
34.步骤403:计算斜边pk0长度;
35.步骤404:计算斜边pk0的方位角;
36.步骤405:计算斜边与已知坐标值的任意中桩k0切线方向的夹角α0;
37.步骤406:计算异强余弦边长度值yq0;
38.步骤407:如果yq0≥10-4
m,则:k1=k0+yq0;
39.或yqn≥10-4
m,则:k
n+1
=kn+yqn;
40.计算中桩k
n+1
的平面坐标值和切线方位角x
n+1
、y
n+1
、qie-ang
n+1
,并以中桩k1的数据替代已知坐标值的任意中桩k0的数据,或以中桩k
n+1
的数据替代中桩kn的数据;
41.步骤408:重复步骤402~407,直至满足yqn《10-4
m的条件,得到垂足中桩a和偏距ap;
42.步骤409:对于有多个垂足中桩的复杂曲线,可以将研究路段的起点或终点作为k0,同时设置异强改正系数,使αn始终从单一方向逐渐趋近垂直条件,直到得到第一个垂足中桩a和偏距ap;然后以a值与一个经验值的和为第二次研究路段的起点,继续向单一方向开展研究,直到研究路段的终点或起点,求得全部的垂足中桩和偏距;
43.本技术第八方面提供一种处理器,被配置成执行上述的任意点三维坐标的计算方法。
44.通过上述技术方案,产生的有益效果包括:
45.本发明是应用技术,属第三方检测范畴,是建设工程检测新技术,一种任意点三维坐标的计算方法,也可以称为异强坐标系线路与桥隧测量检测法,或简称为异强坐标系测量检测法,可以应用于线路与桥隧工程勘察设计、施工测量和测量检测全过程,可以针对具体工程项目的具体实际情况,发现、分析和解决工程项目设计阶段、施工阶段中,影响质量、安全的重大难题;
46.在工程勘察设计过程中,利用本发明,可以判定拟定设计线与已知地标特征点或构造物之间关系,在工程勘察设计验收阶段,可以计算已知地标特征点或构造物与拟建工程的空间位置关系;
47.设计图纸会审时,采用本发明算法,用几何公式法进行验算,可以提出符合现场实际情况的、科学的、合理的、可行的设计图纸优化建议,设计图纸采用通用绘图软件,用几何作图法绘制而成,通常情况下,可能有一些遗漏,甚至错误;
48.在施工过程中,直接面对工程项目设计图纸,进行事前、事中控制,以科学、准确、权威的测量计算成果指导施工方和监理方的测量工程师,可以避免盲目测量放样,可以避免返工处理,可以提高工作效率,提高测量放样工作的准确率;
49.在施工验收阶段,以标准化、程序化、准确率百分之百的测量计算成果,检测已经完工的工程实体的测量放样成果,检测工程项目主要控制指标,包括路线平面线型、纵断
面、横断面、视距、超高、加宽,检测路面纵坡坡度和横坡坡度、边坡坡度是否与批复的设计文件相符合,检测工程项目桥涵、隧道结构物的位置、标高、外观尺寸、几何形状是否与批复的设计文件相一致,检测工程项目是否满足规范的要求,保证竣工后的工程项目实体与设计图纸相一致,确保工程项目线形连续、指标均衡、视觉良好、景观协调,确保行车安全、舒适、快速。
50.本技术实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
51.附图是用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本技术实施例,但并不构成对本技术实施例的限制。全部附图都属于平面图,在附图中:
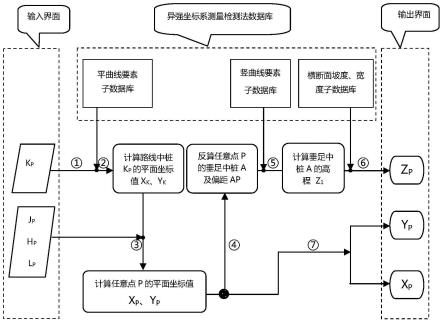
52.图1示意性示出了根据本技术实施例的一种任意点三维坐标的计算方法的流程示意图;
53.图2示意性示出了根据本技术实施例的一种确定已知坐标值任意点对应的垂足中桩和偏距的流程示意图;
54.图3示意性示出了根据本技术实施例的异强坐标系与路线整体坐标系关系的平面示意图;
55.图4示意性示出了根据本技术实施例的异强坐标系与整体极坐标系转换的示意图;
56.图5示意性示出了根据本技术实施例的路线平曲线的点域模型示意图;
57.图6示意性示出了根据本技术实施例的直线段垂足域量子模型示意图;
58.图7示意性示出了根据本技术实施例的曲线段的量子垂足域碰撞模型的原理示意图;
59.图8示意性示出了根据本技术实施例的缓和曲线路段中桩计算“弯弓”示意图;
60.图9示意性示出了根据本技术实施例的直线段中桩计算直示意图;
61.图10示意性示出了根据本技术实施例的圆曲线路段中桩计算“弦月”示意图;
62.图11示意性示出了根据本技术实施例的路线整体坐标系平面示意图;
63.图12示意性示出了根据本技术实施例的局部坐标系示意图;
64.图13示意性示出了根据本技术实施例的局部极坐标系示意图;
65.图14示意性示出了根据本技术实施例的整体极坐标系示意图;
66.图15示意性示出了根据本技术实施例的简化的量子垂足域碰撞模型示意图;
67.图16示意性示出了根据本技术实施例的已知坐标任意点反算对应垂足桩号及偏距平面示意图;
68.图17示意性示出了根据本技术又一实施例的一种任意点三维坐标的计算方法的流程示意图。
具体实施方式
69.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,应当理解的是,此处所描
述的具体实施方式仅用于说明和解释本技术实施例,并不用于限制本技术实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
70.本发明为了解决上述问题,提供了一种任意点三维坐标的计算方法。
71.一种任意点三维坐标计算方法的总的发明构思,包括以下五个发明,其中,方法发明1是组合发明,方法发明4是开拓性发明。
72.方法发明1:一种任意点三维坐标的计算方法;
73.方法发明2:一种任意中桩平面坐标的数学模型和算法;
74.方法发明3:一种任意点平面坐标的数学模型和算法;
75.方法发明4:一种反算并确定任意点已知坐标值p(x
p
,y
p
)对应的垂足中桩a和偏距ap的数学模型和算法;
76.产品发明1:一种线路与桥隧测量检测方法的数据处理器;
77.在第一个总的实施例中,提供了一种任意点三维坐标计算方法的总的技术方案,计算程序流程图如图1所示,包括以下步骤100~步骤700:
78.步骤100:建立数据库,并按异强坐标系的规定,输入设计图纸中已有的、与任意点p对应的辅助性参数k
p
、j
p
、h
p
、l
p
,其中k
p
是中桩,是描述实体工程中心位置的数据;j
p
是交角,是描述实体工程几何外形的数据;h
p
、l
p
是工程细部尺寸数据;
79.步骤200:根据任意中桩kp和平曲线要素子数据库的数据,计算中桩的平面坐标值k
p
(xk、yk)和切线方位角qie-ang1;
80.步骤300:根据数据j
p
、h
p
、l
p
、xk、yk,计算任意点的平面坐标值p(x
p
,y
p
);
81.步骤400:反算并确定已知坐标值任意点p(x
p
,y
p
)对应的垂足中桩a以及偏距ap,计算程序流程图如图2所示;
82.步骤500:纵断面计算:根据竖曲线要素子数据库的数据,计算垂足中桩a的高程z1;
83.步骤600:横断面计算:根据横断面坡度、宽度子数据库的数据与垂足中桩a的高程z1,计算任意点的高程z
p
;
84.步骤700:任意点的三维坐标值是p(x
p
,y
p
,z
p
)。
85.总的技术方案与现有技术casiofx-5800p计算器与道路施工放样程序的相同点,包括:
86.1)相同的研究领域:线路与桥隧测量工程;
87.2)相同的研究对象:三种线形元素,直线、圆曲线和缓和曲线;
88.3)相同的五个计算步骤:步骤200~步骤600,先计算中桩、边桩的平面坐标值,然后反算对应的桩号和偏距,在纵断面和横断面中计算高程;
89.4)相同的计算工具产品:计算机编程技术。
90.总的技术方案与现有技术casiofx-5800p计算器与道路施工放样程序的不同点,包括:
91.1)数学模型完全相反:现有技术认为直线是特殊的曲线,而本发明认为曲线是特殊的直线;
92.2研究重点完全不同,现有技术重点研究缓和曲线计算方法,并将计算方法推广到
圆曲线和直线;本发明重点研究直线的算法,并将算法推广到圆曲线和缓和曲线。
93.在实施例1中,建立了异强坐标系测量检测法数据库,确定了与任意点p对应的辅助性参数k
p
、j
p
、h
p
、l
p
,步骤100包括以下步骤:
94.步骤101:首先对设计图纸的三视图立体模型对应的平、纵、横的所有数据进行分析、归纳、总结、分类,按数据的形状、作用分为以下三类:
95.1)控制性参数。控制性参数是指控制路线走向、描述路线特征时必不可少、缺一不可的基本参数;控制性参数用于以交点法计算交点范围内的中桩坐标值;如:平曲线要素中路线交点的桩号、平面坐标、曲线半径、缓和曲线长度;竖曲线要素的变坡点桩号、高程、曲线半径;标准横坡值、超高值;
96.2)辅助性参数,是指由控制性参数中的平曲线要素计算得到,用于线元法计算其余路段中桩坐标值时,必不可少的参数;如直缓点的参数,包括桩号、平面坐标、切线方位角;
97.3)描述性参数,用于描述事物特性的参数,分以下两类:
98.3.1)设计图纸原始数据,如中桩桩号、工程细部尺寸数据;中桩桩号,是唯一的一个特殊描述性参数,是平、纵、横的联系桥梁,平、纵、横中都离不开中桩桩号;也是使用频率最高的参数,对于给定的中桩桩号,就意味着提供了这些信息,包括位具体位置,距起点的距离、三维坐标值、切线方位角、法线方位角;
99.3.2)由控制参数计算出来的非辅助性参数,如平曲线转角、缓和曲线角、曲线长度、切线长度;竖曲线的坡度、坡长;
100.步骤102:建立数据库模型,数据库是专用数据库,是根据设计图纸的三视图模型和项目特点建设的数据库,一个项目建一次库,数据库,叫异强坐标系测量检测法数据库,见图1,包括以下三个子数据库:
101.1)平曲线要素子数据库,包括交点型数据库、线元型数据库两类;交点型数据库是孙数据库,储存控制性参数,包括交点的桩号、平面坐标、曲线半径、缓和曲线长度,用于计算交点内的前直线、第一缓和曲线、圆曲线、第二缓和曲线、后直线的路线中桩坐标、切线方位角;线元型数据库也是孙数据库,储存辅助性参数,包括主点桩号,平面坐标值x,切线方位角,曲线半径,缓和曲线长度,用于计算该线元上路线中桩坐标、切线方位角;
102.2)竖曲线要素子数据库,储存控制性参数变坡点桩号、变坡点高程、和曲线半径,用于计算纵断面上中桩设计高程;
103.3)横断面坡度、宽度子数据库。储存标准横坡、超高值、加宽路段和加宽公式控制性参数,用于计算横断面上任意点的设计高程。
104.步骤103:输入设计图纸中已有的、与任意点p对应的辅助性参数k
p
、j
p
、h
p
、l
p
,如图1、图3、图4所示。
105.在实施例2中,提供了一种点域模型和算法,用于计算任意中桩的平面坐标,点域是点的集合,是实数域,点域内的所有点都有共性:有一个共同的中桩桩号,相同的平面坐标值,相同的切线方位角;路线平曲线是一个由有限数量点域组成的串珠,是一条特殊的直线,箭直的转角为0
°
,弯弓、弦月的转角不为0
°
;路线平曲线的三种形状弯弓、弦月和箭直,分别对应缓和曲线、圆曲线和直线三种线形元素;点域模型和算法,首先用局部平面坐标系计算缓和曲线、圆曲线的弦长,用局部极坐标系计算缓和曲线、圆曲线的转角,然后统一按
极坐标法,计算直线、圆曲线和缓和曲线任意中桩的平面坐标。
106.一种任意中桩平面坐标的模型和算法,创建了一个新名词点域数学模型,点域数学模型是代数域论和数形结合法在测量计算领域的应用,点域数学模型包括:
107.1)点域是点的集合,是实数域,域论是抽象代数的分支,是代数学中最基本的概念,是不少学科的基础,点域来源于工程设计和施工过程,并服务于工程设计和施工过程,下面工程设计和施工过程中,都将路线平曲线分段,并将曲线上两端点连成的弦线代表对应的曲线段,然后通过技术方案和管理措施,保证曲线段对应的路面线形符合设计和规范要求;
108.1-1)曲线桥弯桥直作设计方法和施工方法;
109.1-2)曲线隧道矿山法施工时的直线炮孔布置,盾构法施工时的盾构机姿态设置和调整;
110.1-3)曲线路段路基施工时每20米设置一个控制性横断面,路面施工时每5米设置一个控制性横断面;
111.2)路线平曲线的点域模型示意图见图5,k是水平轴,x是竖直轴;路线平曲线随着中桩桩号k变大,在x轴上的值也有规律地变化;路线平曲线上任意中桩a,ef长度10
㎜
,ef内点的是a-5
㎜
≤k<a+5
㎜
的无数个中桩点的集合,是一个实数域,记作集合a/10
㎜
,如图5中的大圆圈所示;
112.3)全域。在本例中,以a/10
㎜
为研究对象,将其命名为全域;
113.4)子域。将ef平均分成10段,每段1
㎜
,可以得到10个互相没有交集的子域a、b、c、d、e、f、g、h、i、j;十个子域之和为全域a/10
㎜
;
114.5)孙域。将子域a平均分成10段,每段0.1
㎜
,可以得到10个互相没有交集的孙域a1、b1、c1、d1、e1、f1、g1、h1、i1、j1。因此10个相邻孙域之和为一个子域;
115.6)串珠。图5中,10个互为邻居、互相没有交集的子域a、b、c、d、e、f、g、h、i、j之间的这种关系,定义为串珠,如a、b、c、d、e、f、g、h、i、j串珠就是全域a/10;
116.7)碰撞。相邻子域之间的这种关系,定义为碰撞,如图5中a碰撞b,b碰撞c,c碰撞d,图6中a1碰撞a2;
117.8)相交。如果某两个点域有部分相同的元素,则定义为相交,如图7中的点域k5与点域a相交;
118.9)重合。如果某两个点域所有的元素都完全相同,则定义为重合。
119.10)点域的特征。点域是集合,有确定的直径,点域特征的共性包括:每个点域都是直线段,点域内的所有点都有一个共同的中桩桩号,都有相同的平面坐标值,都有相同的切线方位角;随着桩号变大,点域的平面位置也按数学几何公式规律发生跳跃变化,切线方位角也有规律地发生跳跃变化。
120.11)点域的作用是将复杂的路线平曲线简单化,变换成有限数量的图形集合,实现数形结合。在图5中,路线平曲线是一条复杂曲线,由无数的几何点组成;而按点域理论,路线平曲线是一个由有限数量点域组成的串珠,是一条特殊的直线,直线的转角为0
°
,缓和曲线、圆曲线的转角不是0
°
。
121.一种任意中桩平面坐标的模型和算法,根据路线平曲线几何性质、形状,分为以下三种类型:
122.1)弯弓,表示缓和曲线路段,见图8的粗实线部分,缓和曲线的直缓点,或缓直点,与缓和曲线上任意中桩相连成弦,弦与实际路线不一致,实际路线较缓,弦与实际路线组成的形状象弯弓。
123.3)箭直,表示直线路段,见图9的粗实线部分,弦与实际路线重合,形状象箭一样的直线。
124.2)弦月,表示圆曲线路段,见图10的粗实线部分,圆曲线的缓圆点与圆曲线上任意中桩点相连成弦,弦与实际路线不一致,实际路线是圆弧,弦与实际圆弧路线组成的形状象弦月。
125.在实施例3中,提供了一种任意中桩平面坐标的计算方法,步骤200包括以下步骤:
126.步骤201:以一个已知中桩k0为原点,以已知中桩路线切线方向为x轴,以法线方向为y轴,建立局部平面坐标系,计算任意中桩在局部平面坐标系中的x、y值。在本发明中,局部平面坐标系的作用仅用于计算弦长值;
127.计算直线段任意中桩k
p
在局部坐标系中的坐标值,使用以下公式:
128.x=k
p-k0ꢀꢀꢀ
(公式1)
129.y=0
ꢀꢀꢀ
(公式2)
130.上面的公式中:k0是交点桩号,是平曲线要素子数据库中的数据,x、y—中桩k
p
在局部坐标系中的坐标值;
131.计算缓和曲线段任意中桩k
p
在局部坐标系中的坐标值,使用以下公式:
132.l=(k
p-zh)
ꢀꢀꢀ
(公式3)
[0133][0134][0135]
上面的公式中:r是曲线半径,ls是缓和曲线长度,r、ls都是平曲线要素子数据库中的数据;l—曲线长度,!—阶乘,*—乘法,/—除法,n是项次序号,n为3~19的自然数,x、y—中桩k
p
在局部坐标系中的坐标值;
[0136]
计算圆曲线段任意中桩k
p
在局部坐标系中的坐标值,使用以下公式:
[0137]
x=rsinβ
ꢀꢀꢀ
(公式6)
[0138]
y=r(1-cosβ)
ꢀꢀꢀ
(公式7)
[0139]
上面的公式中:r是曲线半径,是平曲线要素子数据库中的数据;x、y—中桩k
p
在局部坐标系中的坐标值;
[0140]
步骤202:以已知中桩k0的切线方向为起始边,建立局部极坐标系,计算任意中桩k
p
在局部极坐标系中的转角和弦切角。在本发明中,局部极坐标系的作用仅用于计算转角和弦切角;
[0141]
计算直线段任意中桩k
p
的转角、弦切角,使用以下公式:
[0142]
β=0
ꢀꢀꢀ
(公式8)
[0143]
α=0
ꢀꢀꢀ
(公式9)
[0144]
上面的公式中:β—转角,α—弦切角;
[0145]
计算缓和曲线段任意中桩k
p
的转角、弦切角使用以下公式:
[0146]
β=90(k
p-zh)2÷
(π*r*ls)
ꢀꢀꢀ
(公式10)
[0147]
α=tan-1
(y/x)≈β/3
ꢀꢀꢀ
(公式11)
[0148]
上面的公式中:zh是直缓点桩号,是平曲线要素子数据库中的数据;l—曲线长度,β—转角,α—弦切角,x、y—中桩k
p
在局部坐标系中的坐标值;
[0149]
计算圆曲线段任意中桩k
p
的转角、弦切角使用以下公式:
[0150]
β=180(k
p-hy)
÷
πr
ꢀꢀꢀ
(公式12)
[0151]
α=90(k
p-hy)
÷
πr
ꢀꢀꢀ
(公式13)
[0152]
上面的公式中:hy是缓圆点桩号,是平曲线要素子数据库中的数据;β—转角,α—弦切角;
[0153]
步骤203:计算任意中桩的平面坐标和切线方位角。具体地,计算缓和曲线、圆曲线、直线三种线形元素任意中桩k
p
坐标和切线方位角的方法,使用以下相同的直线计算公式:
[0154]
c-ang1=qie-ang0+α
ꢀꢀꢀ
(公式14)
[0155][0156]
xk=x0+c*cos(c-ang1)
ꢀꢀꢀ
(公式16)
[0157]
yk=y0+c*sin(c-ang1)
ꢀꢀꢀ
(公式17)
[0158]
qie-ang1=qie-ang0+β
ꢀꢀꢀ
(公式18)
[0159]
上面的公式中:x0、y0、qie-ang0—交点或直缓点,或缓圆点的坐标和切线方位角,是平曲线要素子数据库中的数据;c-ang1—弦长方位角,c—弦长,xk、yk、qie-ang1—中桩k
p
坐标和切线方位角。
[0160]
一种任意中桩平面坐标的计算方法,使用了以下坐标系,包括:
[0161]
1)路线整体坐标系,以正北方向为x轴,以正东方向为y轴,记作x-0-y,见图11;p(1000,1000)表示,点p沿x轴方向的水平长度是1000米,沿y轴方向的水平长度是1000米;m(600,500)表示,点m沿x轴方向的水平长度是600米,沿y轴方向的水平长度是500米;路线整体坐标系是中国通用的测量坐标系,是设计图纸指定采用的坐标系,可以直接与大地经纬度互相换算,同大地经纬度特点类似,x轴对应纬度,y轴对应经度;一般采用1980西安坐标系,1985国家黄海高程基准。
[0162]
2)局部平面坐标系,见图12,以路线中桩桩号k为原点,以路线切线方向为x轴,以法线方向为y轴,局部平面坐标系x轴方向不是正北方向,y轴方向也不是正东方向,在本发明中,其作用是仅用于计算弦长c值。
[0163]
3)局部极坐标系,见图13;记作(θ
′
,ρ),以中桩桩号k的切线方向n
′
为起始边,θ
′
表示该点和中桩桩号k点的连线与这条边的夹角,ρ表示该点到点中桩桩号k的距离;在本发明中,采用局部极坐标系计算弦月和弯弓曲线元的弦切角、转角的角度值θ
′
,因此本发明的计算方法适用于任意转角的圆曲线和各种类型的缓和曲线。
[0164]
4)整体极坐标系,见图14,记作(θ,ρ),其中θ表示该点与原点的连线同正北x方向的夹角,ρ表示该点到原点的距离。
[0165]
5)路线整体坐标系的坐标值(x,y)的对应关系为:
[0166]
x=ρcosθ
ꢀꢀꢀ
(公式19)
[0167]
y=ρsinθ
ꢀꢀꢀ
(公式20)
[0168]
6)(θ,ρ)整体极坐标系的计算公式:
[0169]
θ=tan-1
(y/x)
ꢀꢀꢀ
(公式21)
[0170][0171]
一种任意中桩平面坐标的计算方法,相关自定义包括:
[0172]
1)对相关数据变量进行定义,不论变量的值是正,还是负值,都可以直接参与运算;
[0173]
2)长度单位默认为米,角度单位默认为度,特别说明者除外。
[0174]
3)路线整体坐标系是默认的坐标系,任意点p(x
p
,y
p
,z
p
)的三维坐标值都是正数;
[0175]
4)路线整体坐标系、局部平面坐标系都采用右手测量坐标系;路线整体坐标系中的x轴是正北方向,数学平面直角坐标系中标注为y;路线整体坐标系中的y轴是正东方向,而数学平面直角坐标系中标注为x,两者正好交换位置。
[0176]
5)整体极坐标系(θ,ρ)与局部极坐标系(θ
′
,ρ)中,θ与θ
′
取值范围是-∞~+∞,一般在-720
°
~720
°
之间;ρ取值范围是-∞~+∞:
[0177]
5.1)当θ
′
﹤0时,表示以n
′
方向为起点,逆时针旋转这个角度值;如图13中:ka
“‑
30,100”;
[0178]
5.2)当θ
′
﹥0时,表示以n
′
方向为起点,顺时针旋转这个角度值;如图13中:kb“45,100”;
[0179]
5.3)当ρ﹤0时,表示点位在角度值+180
°
方向,如图13中:kc“45,-100”=kc“225,100”。
[0180]
6)平曲线半径r小于0表示是左转平曲线,大于0则表示是右转平曲线;r=0时,表示该路段为直线。
[0181]
7)淡化平曲线的左转、右转属性,淡化凹竖曲线和凸竖曲线概念,由测量软件计算后,自动判断属性。
[0182]
8)对于“弯桥直作”的桥梁,结构物的短轴线方向统一为桥梁中心桩号的切线方向,程序运算输入k值时,在k值前面加负号,此时,程序会提示输入一个角度值θ作为h轴方位角度值。
[0183]
在实施例4中,提供了一种异强坐标系数学模型和算法,用于计算任意点的平面坐标或三维坐标,其特征包括:异强坐标系是以数形结合法为基础、就地取材的、自定义工程坐标系。如图3所示,异强坐标系以中桩桩号k为原点,以路线切线方向或结构物的短轴线方向为h轴,以长轴线方向为l轴,h轴与l轴的交角为j。其中,j不一定是90
°
。例如,若j不为90
°
,则异强坐标系可以是平面斜交坐标系。
[0184]
异强坐标系数学模型是一个综合模型,是对道路、桥梁、通涵、隧道中常用数学模型的概括和总结,包容局部平面坐标系和局部极坐标系;当j为90
°
时,异强坐标系等同于局部平面坐标系;当h或l值为0时,异强坐标系等同于局部极坐标系,因此,异强坐标系数学模型和算法适用于道路、桥梁、涵洞、隧道上的任意点。
[0185]
异强坐标系与路线整体坐标系的转换,如图3所示,路线任意点p,在异强坐标系中,记作p(k,j,h,l),与路线整体坐标系的坐标值p(x,y)的对应关系为:
[0186]
x=xk+hcos(qie-ang1)+lcos(qie-ang1+j)
ꢀꢀꢀ
(公式23)
[0187]
y=yk+hsin(qie-ang1)+lsin(qie-ang1+j)
ꢀꢀꢀ
(公式24)
[0188]
上面的公式中:xk,yk是已知中桩k的坐标值,qie-ang1是已知中桩k的切线方位角;
[0189]
如图4所示,异强坐标系与整体极坐标系p(θ,ρ)的对应关系为:
[0190]
x=l
p
+h
p
*cosj
p
ꢀꢀꢀ
(公式25)
[0191]
y=h
p
*sinj
p
ꢀꢀꢀ
(公式26)
[0192]
θ
′
=tan-1
(y
÷
x)
ꢀꢀꢀ
(公式27)
[0193]
θ=qie-ang1+j
p-θ
′ꢀꢀꢀ
(公式28)
[0194][0195]
上面的公式中:qie-ang1是已知中桩k
p
的切线方位角,x、y是局部平面坐标系坐标值,θ
′
为任意点p与已知中桩k
p
连线和l轴的夹角。
[0196]
在实施例5中,一种任意点p平面坐标的计算方法,包括步骤300,从异强坐标系,转换至路线整体坐标系,直接计算任意点的平面坐标值时,使用以下公式:
[0197]
x
p
=xk+h
p
cos(qie-ang1)+l
p
cos(qie-ang1+j
p
)
ꢀꢀꢀ
(公式30)
[0198]yp
=yk+h
p
sin(qie-ang1)+l
p
sin(qie-ang1+j
p
)
ꢀꢀꢀ
(公式31)
[0199]
上面的公式中:xk、yk、qie-ang1是中桩k
p
的坐标值和切线方位角。
[0200]
在实施例6中,一种反算并确定已知坐标值任意点对应的垂足中桩及偏距的计算方法,创建了是一个新名词垂足域,垂足域是代数域论和模糊数学在测量计算领域的综合应用,其特征包括:
[0201]
1)垂足域是点的集合,是实数域,是工程数学的概念,此时的交角≈90
°
;垂足是一个没有大小的点,平面解析几何学中两条直线正交于该点,交角≡90
°
整;垂足域理论认为,垂足是垂足域中的一个特殊点,垂足域中的所有点都和垂足一样,满足近似垂直条件要求。
[0202]
2)图6是直线段垂足域量子模型示意图,线段a1~a9的长度为9nm,分为9个点域,分别为点域a1、点域a2
…
点域a9;p为线段平分线上点,点a5为几何垂足。p点连接a1,与线段的夹角为α1,p点连接a2,与线段的夹角为α2,依次连接到a9,得到α9:
[0203]
3)当计算精度为9nm,a1~a9域上的点都是p点的近似垂足,α1≈90
°
,记作垂足域p/a1a9;
[0204]
4)当计算精度为7nm,a2~a8域上的点都是p点的近似垂足;α2﹥α1,α2≈90
°
,记作垂足域p/a2a8;
[0205]
5)当计算精度为5nm,a3~a7域上的点都是p点的近似垂足;α3﹥α2,α3≈90
°
,记作垂足域p/a3a7;
[0206]
6)当计算精度为3nm,a4~a6域上的点都是p点的近似垂足;α4﹥α3,α4≈90
°
,记作垂足域p/a4a6;
[0207]
7)当计算精度为1nm,a5域上的点都是p点的近似垂足,α5﹥α4,且α5≡90
°
记作p/a5。
[0208]
一种简化的量子垂足域碰撞模型,是第一代模型,如图15所示,在路线整体坐标系中,直线oc的起点坐标o(0,0),切线方位角0
°
,终点c(240,0),已知点p(200,300),求点p对应直线的垂足a(xa,0)的坐标值xa。
[0209]
如图15所示,在直线起点o建立量子垂足域,量子垂足域o是-5nm~5nm范围内点的集合;量子垂足域o向x轴方向移动10nm,得到与之形成碰撞关系的量子垂足域o1,依此类推,得到与量子垂足域o
n-1
是碰撞关系的量子垂足域on,当n=2*10
10
时,量子垂足域on与量
子垂足域a重合。通过对图15中直角三角形pa0的分析,找到了三种解题方法,分别以o(0,0)、b(50,0)、c(240,0)三个点为开始点,有关计算数据见下表1~3;三个结果都是200m,都是正确的;当n=8时,计算精度都达到了10-4
m,当n=16时,计算精度都达到了10-9
m。
[0210]
表1.以o(0,0)为开始点的相关计算数据统计表
[0211][0212]
表2.以b(50,0)为开始点的相关计算数据统计表
[0213]
切线方向的夹角;依次类推,对于路线平曲线上点kn,都可以建立类似的异强直角三角形pknbn,得到类似夹角αn,直到αn满足垂直条件要求为止;
[0220]
异强正弦边长度值pbn=pkn×
sinαnꢀꢀꢀ
(公式32)
[0221]
异强余弦边长度值yqn=k
nbn
=pkn×
cosαnꢀꢀꢀ
(公式33)
[0222]
量子几何模型始终是收敛的:按模糊数学方法,在垂直和不垂直之间设定近似垂直概念,αn是判定垂直的定性指标。当αn的值与垂直条件差值小于1
°
时,其对应的量子点域kn处于核心区;在核心区内,αn逐渐趋近垂直条件,量子点域kn与量子垂足域a发生碰撞或相交,当αn的值满足垂直条件时,量子点域kn与量子垂足域a相交或重合,训练结束;按量子数学方法,取异强余弦边yq进行重点研究:异强余弦边yq是判定垂足的定量指标,在核心区外的异强余弦边yq绝对值较大,在核心区内,异强余弦边yq绝对值则较小;随着αn逐渐趋近垂直条件,异强余弦边yq的值达到量子级,并逐渐趋近0,中桩kn也逐渐趋近垂足中桩a的值,训练结束;
[0223]
学习率:将点域作为一个学习率,模型收敛的速度很慢;异强余弦边,是一个动态的值,是非常合适的学习率取值,在核心区外的异强余弦边绝对值较大,模型收敛的速度很快;在核心区内,异强余弦边绝对值则较小,模型收敛的速度会变慢;在核心区的中心地段,模型收敛的速度会变得越来越慢,随着αn逐渐趋近垂直条件,异强余弦边的值达到量子级,并逐渐趋近0;总体而言,选择异强余弦边值作学习率取值,模型收敛的速度由快变慢,结果也特别理想;
[0224]
确定已知坐标值任意点p(x
p
,y
p
)对应的垂足中桩a以及偏距ap的具体算法:首先确定计算精度,在普通pc计算机条件下,最大允许精度是10-15
m,按现有测量仪器精度10-3
m,测量计算精度一般情况取10-4
m,当满足条件异强余弦边yqn﹤10-4
m时,则垂足中桩a的值等于中桩kn的值,偏距ap的值等于异强正弦边的值;
[0225]
在核心区的中心地段,是量子微观世界:直线、圆曲线、缓和曲线三种线形元素都可以采用相同的方法,确定已知坐标值任意点p(x
p
,y
p
)对应的垂足中桩a以及偏距ap,因此计算方法适用于路线平曲线的直线、圆曲线和缓和曲线三种线形元素;
[0226]
在实施例7中,提供了一种反算并确定任意点已知坐标值对应的垂足中桩及偏距的计算方法,如图7和图16所示,步骤400包括以下步骤:
[0227]
步骤401:确定工程测量计算精度10-4
m;
[0228]
步骤402:k0是所研究路段已知坐标值的任意中桩,是已知点,连结已知坐标值的任意中桩k0和已知坐标值任意点p,得到已知线段pk0,然后在已知坐标值任意中桩k0切线方向上作已知坐标值任意点p的垂足b0,得到异强直角三角形pk0b0;
[0229]
步骤403:计算任意点p与中桩k0连线长度pk0,使用以下公式:
[0230][0231]
步骤404:计算斜边pk0的方位角pk
0-ang,使用以下公式:
[0232]
[0233]
步骤405:计算斜边与已知坐标值的任意中桩k0切线方向的夹角α0,使用以下公式:
[0234]
α0=pk
0-ang-qie-ang0ꢀꢀꢀ
(公式36)
[0235]
步骤406:计算异强余弦边长度值yq0,使用以下公式:
[0236]
yq0=pk0×
cosα0ꢀꢀꢀ
(公式37)
[0237]
步骤407:如果yq0≥10-4
m,则:k1=k0+yq0;
[0238]
或yqn≥10-4
m,则:k
n+1
=kn+yqn;
ꢀꢀꢀ
(公式38)
[0239]
计算中桩k
n+1
的平面坐标值和切线方位角x
n+1
、y
n+1
、qie-ang
n+1
,并以中桩k1的数据替代已知坐标值的任意中桩k0的数据,或以中桩k
n+1
的数据替代中桩kn的数据;
[0240]
步骤408:重复步骤402~407,直至满足yqn《10-4
m的条件,得到垂足中桩a和偏距ap,反算的程序流程图如图2所示;
[0241]
a=kn
ꢀꢀꢀ
(公式39)
[0242]
ap=pkn
×
sinαn
ꢀꢀꢀ
(公式40)
[0243]
当ap﹤0时,则表示任意点p在垂足中桩a左侧;
[0244]
当ap=0,则表示任意点p是中桩;
[0245]
当ap﹥0,则表示任意点p在垂足中桩a右侧;
[0246]
上面的公式以及图2中:x0、y0、qie-ang0为已知起点k0的平面坐标和切线方位角;x
p
、y
p
为已知任意点p的平面坐标;kn是桩号,pkn是p与kn两点的连线;αn是pkn连线与kn切线方向的夹角;pkn
×
sinαn的计算值是异强正弦边的值;yqn是异强余弦边的值或改正后的异强余弦边的值;
[0247]
步骤409:通常情况下,平曲线的转角小于180
°
时,只有一个垂足a;对于有多个垂足中桩的复杂曲线,首先计算平曲线的总转角,判定垂足的个数;然后将研究路段的起点或终点作为k0,同时设置异强改正系数,必要时还可以使用绝对值,使αn始终从单一方向逐渐趋近垂直条件,直到得到第一个垂足中桩a和偏距ap;然后以a值与一个经验值的和为第二次研究路段的起点,继续向单一方向开展研究,直到研究路段的终点或起点,求得全部的垂足中桩和偏距;
[0248]
在实施例8中,步骤500包括:纵断面计算:根据竖曲线要素子数据库中的数据,计算垂足中桩a的高程z1;高程z1计算方法是现有技术,计算过程比较简单,在路线纵断面上,根据相邻三个变坡点桩号、高程、竖曲线半径,计算纵坡度、切线长度、改正值,即可求得z1值。
[0249]
在实施例9中,步骤600包括:横断面计算:根据横断面坡度、宽度子数据库中的数据与垂足中桩a的高程z1,计算任意点的高程z
p
;方法也是现有技术;
[0250]
在实施例10中,步骤700包括:任意点的三维坐标值是p(x
p
,y
p
,z
p
),这是一个输入语句,没有计算过程。
[0251]
在第二个总的实施例中,提供了一种处理器,处理器用于运行程序,其中,程序运行时执行上述的任意点三维坐标的计算方法。
[0252]
在实施例11中,如图17所示,提供了另一种任意点三维坐标的计算方法的流程示意图。
[0253]
针对任意点p,处理器可以确定与任意点p对应的异强坐标值,与任意点p对应的异强坐标值可以包括任意点p对应的任意中桩k
p
、对应的构造物交角j
p
、对应的构造物细部尺
寸h
p
和l
p
。其中,任意点p可以指的是线路或桥隧外的任意一个检测点。任意点p可以指的是异强坐标系中的异强坐标点。异强坐标系可以包括h轴和l轴。h
p
和l
p
可以指的是构造物的细部尺寸。具体地,针对任意点p,h
p
可以指的是任意点p在异强坐标系h轴的长度,l
p
可以指的是任意点p在异强坐标系l轴的长度。异强坐标系h轴与l轴之间的夹角即可以指的是构造物交角j
p
。交角j
p
可以不为90
°
。
[0254]
在确定与任意点p对应的异强坐标值的情况下,处理器可以根据任意点p对应的任意中桩k
p
和平曲线要素子数据库中的数据确定任意中桩k
p
的平面坐标值xk和yk。其中,平曲线要素子数据库可以包括交点型数据库和线元型数据库。交点型数据库可以包括控制性参数。控制性参数可以包括交点内的前直线、第一缓和曲线、圆曲线、第二缓和曲线、后直线的路线中桩坐标以及切线方位角等。线元型数据库可以包括辅助性参数。辅助性参数可以包括主点桩号、平面坐标值、切线方位角、曲线半径以及缓和曲线长度等。
[0255]
在确定任意中桩k
p
的平面坐标值xk和yk的情况下,处理器可以根据长度h
p
、长度l
p
、交角j
p
以及任意中桩k
p
的平面坐标值xk和yk确定任意点p的坐标值x
p
和y
p
。然后,处理器可以进一步地确定任意点p对应的路线垂足中桩桩号a以及偏距ap。处理器可以根据竖曲线要素子数据库中的数据确定路线垂足中桩桩号a的高程z1,并可以进一步地根据横断面坡度、宽度子数据库中的数据与路线垂足中桩桩号a的高程z1确定任意点p的坐标值z
p
。在确定任意点p的坐标值x
p
、y
p
以及z
p
的情况下,即可以确定任意点p的三维坐标。其中,竖曲线要素子数据库中的数据可以包括变坡点的桩号、高程以及曲线半径。横断面坡度、宽度子数据库中的数据可以包括横坡度和坡长等。
[0256]
在实施例12中,与任意点p对应的路线的类型可以包括直线路段。在与任意点p对应的路线的类型为直线路段的情况下,处理器可以确定任意中桩k
p
的平面坐标值xk和yk。进一步地,处理器确定任意中桩k
p
的平面坐标值xk和yk所采用的公式可以包括:α=0;β=0;c-ang1=qie-ang0+α;x=k
p-k0;y=0;xk=x0+c*cos(c-ang1);yk=y0+c*sin(c-ang1);qie-ang1=qie-ang0+β。其中,α为弦切角,β为转角,c-ang1为弦长方位角,c为弦长,x、y为中桩k
p
在局部坐标系中的坐标值,k
p
为任意点p对应的任意中桩,xk和yk为任意中桩k
p
的平面坐标值。具体地,xk可以指的是中桩k
p
在平面坐标系x轴的坐标值,yk可以指的是中桩k
p
在平面坐标系y轴的坐标值。qie-ang1可以指的是切线方位角。
[0257]
在实施例13中,与任意点p对应的路线的类型可以包括圆曲线路段。在与任意点p对应的路线类型为圆曲线路段的情况下,处理器可以确定任意中桩k
p
的平面坐标值xk和yk。进一步地,处理器确定任意中桩k
p
的平面坐标值xk和yk所采用的公式可以包括:α=90(k
p-hy)
÷
πr;β=180(k
p-hy)
÷
πr;c-ang1=qie-ang0+,x=rsinβ,y=r(1-cosβ),xk=x0+c*cos(c-ang1);yk=y0+c*sin(c-ang1),qie-ang1=qie-ang0+β。其中,α为弦切角,β为转角,hy为缓圆点,r为曲线半径,c-ang1为弦长方位角,c为弦长,x、y为任意中桩k
p
在局部坐标系中的坐标值,k
p
为任意点p对应的任意中桩,xk和yk为任意中桩k
p
的平面坐标值。具体地,xk可以指的是中桩k
p
在平面坐标系x轴的坐标值,yk可以指的是中桩k
p
在平面坐标系y轴的坐标值。qie-ang1可以指的是切线方位角。
[0258]
在实施例14中,与任意点p对应的路线的类型可以包括缓和曲线路段。在与任意点p对应的路线类型为缓和曲线路段的情况下,处理器可以确定任意中桩k
p
的平面坐标值xk和
yk。进一步地,处理器确定任意中桩k
p
的平面坐标值xk和yk所采用的公式可以包括:l=(k
p-zh),
[0259][0260][0261]
β=90(k
p-zh)2÷
πrls;α=tan-1
(y/x)≈β/3;c-ang1=qie-ang0+,xk=x0+c*cos(c-ang1);yk=y0+c*sin(c-ang1),qie-ang1=qie-ang0+β。其中,α为弦切角,β为转角,zh为直缓点,ls为完全缓和曲线长度,l为缓和曲线的计算长度,r为曲线半径,c-ang1为弦长方位角,c为弦长,x、y为任意中桩k
p
在局部坐标系中的坐标值,k
p
为任意点p对应的任意中桩,xk和yk为任意中桩k
p
的平面坐标值。具体地,xk可以指的是中桩k
p
在平面坐标系x轴的坐标值,yk可以指的是中桩k
p
在平面坐标系y轴的坐标值。qie-ang1可以指的是切线方位角。
[0262]
在实施例15中,任意点p的坐标值x
p
和y
p
可以通过如下公式确定:
[0263]
x
p
=xk+h
p
cos(qie-ang1)+l
p
cos(qie-ang1+j
p
)
[0264]yp
=yk+h
p
sin(qie-ang1)+l
p
sin(qie-ang1+j
p
)。
[0265]
在实施例16中,任意点p的路线垂足中桩桩号a以及偏距ap可以分别通过下述公式确定:a=n;ap=pknsinαn,其中,a为任意点p的路线垂足中桩桩号,ap为任意点p与路线垂足中桩桩号a之间的偏距,kn为量子垂足域,αn为任意点p与kn连线与kn切线方向的夹角。
[0266]
在实施例17中,处理器可以获取竖曲线要素子数据库中相邻三个变坡点的桩号、以及曲线半径,并可以根据三个变坡点的桩号、高程以及曲线半径确定路线垂足中桩桩号a的高程z1。
[0267]
在实施例18中,处理器可以先获取横断面坡度、宽度子数据库中的横坡度和坡长,然后可以根据横坡度与坡长确定高差。在确定高差的情况下,处理器可以将高差与路线垂足中桩桩号a的高程z1之和确定为任意点p的坐标值z
p
。
[0268]
在建公路项目实施例19中,对任意中桩进行了计算,计算成果见表4;对任意点,从异强坐标系直接计算整体坐标系三维坐标值,计算成果见表5;对已知坐标任意点,进行了坐标反算和复核,计算误差值都为0,见表6.某在建公路项目已知坐标反算复核成果一览表。
[0269]
表4.某在建公路项目任意中桩计算成果一览表
[0270]
点名桩号xy设计标高切线方位角直缓5k26+161.00530 146.86174 213.578470.681220.27 123缓圆5k26+351.00530 003.60074 088.787466.311222.16 040圆缓5k26+632.54329 804.44373 889.934459.836227.38 412缓直5k26+822.54329 679.43373 746.863455.466229.27 329直缓6k26+822.54329 679.43373 746.863455.466229.27 329缓圆6k27+052.54329 526.63573 574.999450.485226.09 526圆缓6k27+391.02829 272.71073 351.793443.864216.28 039缓直6k27+621.02829 082.67173 222.295439.379213.10 236
直缓7k27+932.38828 822.05673 051.928433.307213.10 236缓圆7k28+152.38828 640.75672 927.388429.373217.06 443圆缓7k28+373.35528 474.29772 782.336426.374225.01 304缓直7k28+593.35528 326.12772 619.778423.734228.57 512直圆8k28+812.98728 181.93272 454.109423.150228.57 512圆直8k29+445.09827 737.93772 004.775422.960221.43 147
[0271]
表5.某在建公路项目任意点三维坐标的计算成果一览表
[0272][0273]
表6.已知坐标反算垂足中桩和偏距及复核成果一览表
[0274][0275]
本发明的立体模型采用设计单位提供的平纵横三视图模型,采用包括球面坐标系在内的其他立体模型的算法,应包含在本技术的权利要求范围之内。
[0276]
本发明的量子数学模型在升级为立体模型后,可应用于包括数控设备的精准定位、机械零件精加工等其他领域。
[0277]
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。
[0278]
以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进,均应包含在本技术的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1