一种基于Prophet-LSTM的边坡风险预警及滑动体积预测方法
一种基于prophet-lstm的边坡风险预警及滑动体积预测方法
技术领域
1.本发明涉及边坡工程技术领域,尤其涉及一种基于prophet-lstm的边坡风险预警及滑动体积预测方法。
背景技术:
2.滑坡作为一种发生频率较高的自然灾害,已经给全世界各国带来巨大的经济损失,严重威胁着人民的生命财产安全。造成滑坡的因素众多,其中开挖是边坡破坏的重要因素。开挖过程中的边坡卸荷会引起边坡应力场的快速调整和岩土材料的逐渐变形,从而导致原始裂缝的不断扩张和新裂缝的逐渐生成。同时,降雨、地下水位等外界环境因素的影响,加剧了裂缝的扩张,并降低了土壤和软岩等岩土材料的抗剪强度,使边坡更容易发生破坏。传统的边坡风险预警方法主要包括物理模型法和数值模拟法,但通常受到边坡复杂地质特性的限制。随着监测技术与设备的发展,基于深度学习的数据驱动模型被广泛用于边坡风险预警,如灰色系统模型,回归模型,混沌模型等,以预测边坡位移,捕捉边坡位移的非线性动力学行为。但传统的数据驱动模型法存在预测时间长、无法实时动态评价、不能考虑降雨和地下水位变化等环境因素的问题。因此,如何在考虑降雨和地下水位等环境因素的影响下对边坡风险进行实时动态评价与预警,是本领域技术人员亟待解决的问题。
技术实现要素:
3.针对上述存在的问题,本发明旨在提供一种基于prophet-lstm的边坡风险预警及滑动体积预测方法,对边坡监测数据进行预处理后,基于prophet-lstm算法建立边坡位移预测模型,依据该模型进行边坡位移的预测和预警,并建立多参数预警框架对边坡进行综合评价,估计潜在滑坡的体积和位置,以便根据风险损失评估确定应急措施,有助于根据现场监测快速有效地识别滑坡风险,提高对滑坡机理的认识和边坡风险管理。
4.为了实现上述目的,本发明所采用的技术方案如下:
5.一种基于prophet-lstm的边坡风险预警及滑动体积预测方法,其特征在于,包括以下步骤,
6.s1:采集边坡监测数据;
7.s2:对步骤s1中采集到的边坡监测数据进行预处理;
8.s3:基于prophet-lstm算法,建立位移周期预测模型和趋势预测模型,对边坡位移进行预测,并对边坡位移值和边坡预测值进行实时预警;
9.s4:利用边坡不同深度的位移监测数据,分析边坡潜在滑动面深度,将多个危险点位置连接起来形成斜坡滑动面,计算出滑动体积;
10.s5:建立边坡多参数预警框架,对边坡进行多指标的综合评价。
11.进一步的,步骤s1中所述的边坡监测数据包括不同深度边坡位移、地下水位和降雨量。
12.进一步的,步骤s2的具体操作包括,
13.s201:采用3σ准则,对步骤s1中采集的原始边坡监测数据进行异常值的删除;
14.s202:采用离散小波变换方法,对删除异常值后的边坡监测数据进行去噪处理,使位移时间序列曲线平滑有序。
15.进一步的,步骤s202的具体操作包括以下步骤,
16.s2021:采用经验模态分解法,将边坡监测数据的噪声信号分解为高频本征模函数和低频本征模函数;
17.s2022:对s2021获得的高频本征模函数进行小波分解,得到高频小波系数和低频小波系数;
18.s2023:对s2022获得的低频小波系数直接进行数值保留;设定阈值,对高频小波系数进行非线性处理,抑制噪声信号;
19.s2024:将s2023经过阈值处理后的高频小波系数和保持原值的低频小波系数进行小波变换的逆运算,得到小波重构信号;
20.s2025:将s2021得到的低频本征模函数和s2024经过小波重构后的小波重构信号再次进行信号重构,得到去噪信号。
21.进一步的,步骤s3的具体操作包括以下步骤,
22.s301:采用prophet算法,将边坡监测数据的时间序列分解为周期项和趋势项
23.y(t)=g(t)+s(t)+∈
t
24.式中,y(t)是边坡监测数据的时间序列,g(t)为趋势项,s(t)是周期项,∈
t
是误差项,服从正态分布;
25.s302:采用prophet算法预测趋势项;
26.s303:采用lstm算法预测周期项,并建立地下水位、降雨量和边坡周期性位移之间的lstm神经网络模型;
27.s304:将趋势项和周期项的结果相加,得到边坡位移的预测值;
28.s305:根据专家经验,分别设定低风险、中风险和高风险的边坡位移风险阈值,进行边坡位移值和预测值的实时预警;
29.s306:根据岩土体蠕变理论,将边坡运动模式分为初始变形阶段、均匀变形阶段和加速变形阶段,分别设定各阶段的边坡位移速率风险阈值,进行边坡位移速率的实时预警。
30.进一步的,步骤s301的具体操作包括以下步骤,
31.s3011:基于突变点理论,采用prophet自动识别时间序列中的突变点,使用分段线性模型拟合相邻两个突变点之间的变形时间序列,提取趋势项,则趋势项g(t)表示为
32.g(t)=(k+a(t)
t
δ)t+(m+a(t)
t
y)
33.式中,k表示增长率,a(t)表示t时刻前突变点发生变化的次数,δ表示增长率的变化量,m是偏移参数,t为转置符号,δ和γ为适应度;
34.s3012:基于傅里叶级数,采用prophet算法建立周期项模型,则周期项s(t)表示为
[0035][0036]
式中,n表示模型中使用该周期的个数,p表示期望时间序列的周期长度,2n表示拟合周期项需要估计的参数个数,an和bn为常数,由周期性公式拟合得出。
[0037]
进一步的,步骤s303中地下水位、降雨量和边坡周期性位移之间的lstm神经网络
模型为:
[0038]ft
=σ(w
fx
x
t
+w
fhht-1
+bf)
[0039]it
=σ(w
ix
x
t
+w
ihht-1
+bi)
[0040]ot
=σ(w
ox
x
t
+w
ohht-1
+bo)
[0041][0042][0043]ht
=o
t
⊙
tanh(c
t
)
[0044]
式中,f
t
,i
t
,o
t
分别表示遗忘门、输入门和输出门;σ表示sigmoid激活函数;w
fh
,w
ih
,w
oh
,w
ch
分别表示遗忘门、输入门、输出门和神经单元状态的关联权重矩阵;w
fx
,w
ix
,w
ox
,w
cx
分别表示遗忘门、输入门、输出门和神经单元状态的输入权重矩阵;bf,bi,bo,bc表示相应的偏差项;c
t
,c
t-1
,分别表示当前时刻的神经单元状态、上一时刻的神经单元状态和当前时刻的临时神经单元状态;x
t
表示当前时刻的输入值,也即地下水位和降雨量;h
t
表示当前时刻神经单元的输出值,也即边坡周期性位移;
⊙
表示矩阵的hadamard积。
[0045]
进一步的,步骤s4的具体操作包括以下步骤,
[0046]
s401:计算多深度位移监测孔的相邻深度的位移差,将数据整理成相邻深度的相对位移时间序列数据,绘制相邻深度的相对位移时间序列曲线;
[0047]
s402:分别设定低风险、中风险和高风险的相邻深度的相对位移风险阈值,分析相邻深度的相对位移随时间的发展趋势,确定风险水平,评估可能发生滑坡的深度范围与滑坡风险点;
[0048]
s403:将多个滑坡风险点位置连接起来形成边坡滑动面,根据边坡滑动面计算出滑动体积。
[0049]
进一步的,步骤s5的具体操作包括以下步骤,
[0050]
s501:建立边坡综合评价的因素集、评价集、评价矩阵和因素权向量;
[0051]
s502:采用模糊综合评价法,建立边坡综合评价模型,计算得出风险评价结果和系统总得分。
[0052]
进一步的,步骤s501的具体操作包括以下步骤,
[0053]
s5011:建立包含边坡位移程度、边坡位移速率和滑动风险点的风险程度三个影响指标的因素集;
[0054]
s5012:建立包含低风险、中风险和高风险三个评价指标的评价集;
[0055]
s5013:进行单因素模糊评价,根据因素集中元素对评价集中元素的隶属度,建立单因素判断矩阵;
[0056]
s5014:根据边坡位移程度、边坡位移速率和滑动风险点风险程度对边坡稳定性的重要程度,建立各因素权重集合的模糊集,即因素权向量。
[0057]
进一步的,步骤s502的具体操作包括以下步骤,
[0058]
s5021:对s5013确定的单因素判断矩阵和s5014确定的因素权向量,通过模糊变换建立边坡模糊评价模型,得到风险评价结果;
[0059]
s5022:根据边坡风险分类等级,确定由s5012获得的评价集中各个因素的级分,计
算获得系统总得分。
[0060]
本发明的有益效果是:
[0061]
1、本发明中基于prophet-lstm的边坡风险预警及滑动体积预测方法可在考虑降雨和地下水位等环境因素的影响下对边坡风险进行实时动态评价与预警,首先基于物联网技术对不同深度的边坡位移、地下水位和降雨量进行实时监测与数据收集,然后对收集到的边坡监测数据进行消除异常值和去噪等预处理工作,采用prophet算法将时间序列分解为周期项和趋势项,基于prophet-lstm算法,建立边坡位移周期预测模型和趋势预测模型,对边坡位移进行预测,并对边坡位移值和预测值进行实时预警,接着利用边坡不同深度的位移监测数据,分析边坡潜在滑动面深度,将多个危险点位置连接起来形成斜坡滑动面,计算滑动体积,最后建立边坡多参数预警框架,对边坡进行多指标的综合评价。所提方法可以估计潜在滑坡的体积和位置,以便根据风险损失评估确定应急措施,有助于根据现场监测快速有效地识别滑坡风险,提高对滑坡机理的认识和边坡风险管理。
[0062]
2、本发明中提出了一套监测数据预处理流程,采用3σ准则对原始监测数据进行异常值删除,采用离散小波变换(dwt)对数据进行去噪处理。该方法使监测数据时间序列曲线平滑有序,可提高后续预测算法的性能,有效解决了监测数据异常导致预测方法性能差的问题。
[0063]
3、本发明中采用prophet算法将时间序列分解为周期项和趋势项,并基于prophet-lstm算法建立周期项预测模型和趋势项预测模型,对边坡位移进行预测。该方法完成了prophet算法和lstm算法的优势集成,克服了prophet算法变量单一、预测精度低和lstm算法训练时间长、对非周期数据泛化能力差的缺点,使新方法具有时效分解、实时动态预测、多变量输入输出、预测精度高等优点。
[0064]
4、本发明中通过分析不同深度的位移突变数据确定斜坡滑动面,计算出滑动体体积,并采用模糊综合评价法对边坡监测点的风险水平进行综合评价,给出了风险评价结果与系统总得分,为快速识别滑坡风险,及时采取防护措施,避免大规模滑坡提供直接的理论依据。
附图说明
[0065]
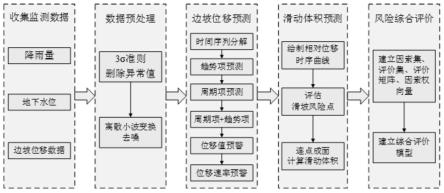
图1为本发明基于prophet-lstm的边坡风险预警及滑动体积预测方法总体流程图;
[0066]
图2为本发明实施例一中原始监测数据、3σ去除异常值的数据、dwt去噪后的数据对比图;
[0067]
图3为本发明实施例一中采用dwt进行去噪处理的操作流程图;
[0068]
图4为本发明实施例一中采用prophet分解时间序列为周期项和趋势项的结果图;
[0069]
图5为本发明实施例一中位移变化突变点的分析结果图;
[0070]
图6为本发明实施例一中趋势项预测结果图;
[0071]
图7为本发明实施例一中周期项预测结果图。
[0072]
图8为本发明实施例一中将趋势项和周期项相加,得到的边坡位移预测结果图;
[0073]
图9为本发明实施例一中将多个滑坡风险点位置连接起来形成的边坡滑动面图;
[0074]
图10为本发明仿真实验中边坡位移多种预测方法的性能比较结果图。
具体实施方式
[0075]
为了使本领域的普通技术人员能更好的理解本发明的技术方案,下面结合附图和实施例对本发明的技术方案做进一步的描述。
[0076]
实施例一:
[0077]
如附图1所示,一种基于prophet-lstm的边坡风险预警及滑动体积预测方法,包括以下步骤,
[0078]
s1:采集边坡监测数据;
[0079]
具体的,所述边坡监测数据包括不同深度边坡位移、地下水位和降雨量,可通过多深度位移、地下水位和降雨量的自动监测平台,基于物联网技术实现对不同深度边坡位移、地下水位和降雨量的实时监测,需要说明的是,自动监测平台为现有技术,可直接用来对不同深度边坡位移、地下水位和降雨量进行实时监测,本技术中的边坡监测数据具体采用贵州凯里邵家庄堆积体边坡监测数据,包括降雨量、地下水位、不同深度的位移数据。
[0080]
进一步的,s2:对步骤s1中采集到的边坡监测数据进行预处理;
[0081]
具体的,s201:采用3σ准则,对步骤s1中采集的原始边坡监测数据进行异常值的删除;
[0082]
因外界干扰或仪器短暂故障等原因,自动监测仪器采集的原始监测数据中存在许多异常数据点,远远超出了合理的数据范围。如附图2所示,在收集的边坡位移原始数据中有许多离散点,并且以突变的形式存在。如果将原始监测数据用于预测,会导致一些预测算法性能较差的问题。为了提高算法性能,需要从原始监测数据中删除异常值。本发明中采用3σ准则删除原始监测数据中的异常值。
[0083]
3σ准则用于对正态或近似正态分布,且测量次数充分大的样本数据进行处理。对于一组原始监测边坡位移数据,假设只包含随机误差,对其进行计算和处理,得到标准差,并根据一定概率确定区间,当数据中监测值的残余误差的绝对值超过间隔误差时,将监测值确定为无效值并予以剔除。通常把
±
3σ的误差作为极限误差,有效值分布在(μ-3σ,μ+3σ)范围内的概率为0.9974,超过该范围的可能性小于0.3%。
[0084]
s202:采用离散小波变换方法(dwt),对删除异常值后的边坡监测数据进行去噪处理,使位移时间序列曲线平滑有序;
[0085]
经过3σ准则的去除异常值后,监测数据仍然存在较大的波动,这种现象属于监测过程中的弱噪声,如附图2所示,这对后续预测模型的建立有很大的干扰。因此,有必要使用离散小波变换对监测数据进行二次平滑处理,去除更多的噪声。原始监测数据、3σ去除异常值的数据、dwt去噪后的数据对比如附图2所示。
[0086]
步骤s202采用离散小波变换方法(dwt),对删除异常值后的边坡监测数据进行去噪处理的操作流程如附图3所示,具体包括以下步骤,
[0087]
s2021:采用经验模态分解法(emd),将边坡监测数据的噪声信号分解为高频本征模函数和低频本征模函数;
[0088]
s2022:对s2021获得的高频本征模函数进行小波分解,得到高频小波系数和低频小波系数;
[0089]
s2023:对s2022获得的低频小波系数直接进行数值保留;设定阈值,对高频小波系数进行非线性处理,抑制噪声信号;
[0090]
s2024:将s2023经过阈值处理后的高频小波系数和保持原值的低频小波系数进行小波变换的逆运算,得到小波重构信号;
[0091]
s2025:将s2021得到的低频本征模函数和s2024经过小波重构后的小波重构信号再次进行信号重构,得到去噪信号。
[0092]
进一步的,s3:基于prophet-lstm算法,建立位移周期预测模型和趋势预测模型,对边坡位移进行预测,并对边坡位移值和边坡预测值进行实时预警;
[0093]
具体的,s301:采用prophet算法,将边坡监测数据的时间序列分解为周期项和趋势项
[0094]
y(t)=g(t)+s(t)+∈
t
[0095]
式中,y(t)是边坡监测数据的时间序列,g(t)为趋势项,s(t)是周期项,∈
t
是误差项,服从正态分布;
[0096]
考虑降雨和地下水位对边坡变形的干扰,以365d为先验条件提取降雨和地下水位引起的周期性位移,分解结果如附图4所示。从附图4中可以看出,prophet提取的趋势项和周期项可以直观地反映位移时间序列相对于原始时间序列的趋势和周期波动。
[0097]
更具体的,s3011:基于突变点理论,采用prophet自动识别时间序列中的突变点,使用分段线性模型(线性增长)拟合相邻两个突变点之间的变形时间序列,提取趋势项,则趋势项g(t)表示为
[0098]
g(t)=(k+a(t)
t
δ)t+(m+a(t)
t
γ)
[0099]
式中,k表示增长率,a(t)表示t时刻前突变点发生变化的次数,δ表示增长率的变化量,m是偏移参数,t为转置符号,δ和γ为适应度;
[0100]
基于突变点理论,识别整个监测数据范围内的潜在突变点,将变化率大于等于0.5mm/d的点记为突变点。位移变化突变点的分析结果如附图5所示。附图5显示了突变点和趋势项之间的关系曲线,黑色曲线是预处理后的时间序列位移累积曲线,虚垂线和时间轴的焦点表示突变次数。
[0101]
s3012:基于傅里叶级数,采用prophet算法建立周期项模型,则周期项s(t)表示为
[0102][0103]
式中,n表示模型中使用该周期的个数,p表示期望时间序列的周期长度,2n表示拟合周期项需要估计的参数个数,an和bn为常数,由周期性公式拟合得出。
[0104]
s302:采用prophet算法预测趋势项;
[0105]
趋势项反映了未来的位移变化趋势,对边坡风险预警具有指导作用。prophet可以实现实时数据的动态分解,确保趋势项的实时更新。根据边坡位移监测数据的累积曲线可知,在开挖过程中,边坡位移时间序列数据的累积曲线大多呈上升趋势,为非饱和曲线。因此,基于prophet算法,采用多级线性拟合方法拟合趋势项的变化曲线,可以预测不同时段的趋势项位移值。趋势项预测结果如附图6所示,预测结果与趋势方向和原始趋项基本一致。
[0106]
s303:采用lstm算法预测周期项,并建立地下水位、降雨量和边坡周期性位移之间的lstm神经网络模型,并对其进行训练;
[0107]
地下水位、降雨量和边坡周期性位移之间的lstm神经网络模型为:
[0108]ft
=σ(w
fx
x
t
+w
fhht-1
+bf)
[0109]it
=σ(w
ix
x
t
+w
ihht-1
+bi)
[0110]ot
=σ(w
ox
x
t
+w
ohht-1
+bo)
[0111][0112][0113]ht
=o
t
⊙
tanh(c
t
)
[0114]
式中,f
t
,i
t
,o
t
分别表示遗忘门、输入门和输出门;σ表示sigmoid激活函数;w
fh
,w
ih
,w
oh
,w
ch
分别表示遗忘门、输入门、输出门和神经单元状态的关联权重矩阵;w
fx
,w
ix
,w
ox
,w
cx
分别表示遗忘门、输入门、输出门和神经单元状态的输入权重矩阵;bf,bi,bo,bc表示相应的偏差项;c
t
,c
t-1
,分别表示当前时刻的神经单元状态、上一时刻的神经单元状态和当前时刻的临时神经单元状态;x
t
表示当前时刻的输入值,也即地下水位和降雨量;h
t
表示当前时刻神经单元的输出值,也即边坡周期性位移;
⊙
表示矩阵的hadamard积(或元素积)。
[0115]
lstm是时间序列数据预测的常用算法,适用于周期性数据,具有预测精度高、多变量输入和输出的优点。因此,采用lstm算法对周期项曲线进行预测。将时序水位、时序降雨数据和周期性位移作为输入项进行预测,建立降雨、水位数据与周期项的关联关系,并建立周期项预测模型。周期项预测结果如附图7所示,预测结果曲线与原始数据曲线基本一致,显示了完美的预测性能。
[0116]
s304:将趋势项和周期项的结果相加,得到边坡位移的预测值,预测曲线如附图8所示;
[0117]
s305:根据专家经验,分别设定低风险、中风险和高风险的边坡位移风险阈值,进行边坡位移值和预测值的实时预警;
[0118]
边坡位移是边坡风险评估的常用指标。当位移达到阈值时,将进行风险预警。将边坡位移风险预警级别划分为三个阶段:低风险(19mm以内)、中风险(19mm-25mm)和高风险(25mm以上)。利用物联网技术,进行边坡位移的实时监测;利用上述步骤建立的prophet-lstm实时动态位移预测模型预测边坡位移,实现边坡位移值和边坡预测值的实时预警。
[0119]
s306:根据岩土体蠕变理论,将边坡运动模式分为初始变形阶段、均匀变形阶段和加速变形阶段,分别设定各阶段的边坡位移速率风险阈值,进行边坡位移速率的实时预警。
[0120]
进一步的,s4:利用边坡不同深度的位移监测数据,分析边坡潜在滑动面深度,将多个危险点位置连接起来形成斜坡滑动面,计算出滑动体积;
[0121]
具体的,s401:计算多深度位移监测孔的相邻深度的位移差,将数据整理成相邻深度的相对位移时间序列数据,绘制相邻深度的相对位移时间序列曲线;
[0122]
s402:分别设定低风险、中风险和高风险的相邻深度的相对位移风险阈值,分析相邻深度的相对位移随时间的发展趋势,确定风险水平,评估可能发生滑坡的深度范围与滑坡风险点;
[0123]
s403:将多个滑坡风险点位置连接起来形成边坡滑动面,根据边坡滑动面计算出滑动体积,边坡滑动面如附图9所示。
[0124]
进一步的,s5:建立边坡多参数预警框架,对边坡进行多指标的综合评价。
[0125]
具体的,s501:建立边坡综合评价的因素集、评价集、评价矩阵和因素权向量;
[0126]
s502:采用模糊综合评价法,建立边坡综合评价模型,计算得出风险评价结果和系统总得分。
[0127]
其中,步骤s501的具体操作包括以下步骤,
[0128]
s5011:建立包含边坡位移程度、边坡位移速率和滑动风险点的风险程度三个影响指标的因素集;
[0129]
s5012:建立包含低风险、中风险和高风险三个评价指标的评价集;
[0130]
s5013:进行单因素模糊评价,根据因素集中元素对评价集中元素的隶属度,建立单因素判断矩阵;
[0131]
s5014:根据边坡位移程度、边坡位移速率和滑动风险点风险程度对边坡稳定性的重要程度,建立各因素权重集合的模糊集,即因素权向量。
[0132]
步骤s502的具体操作包括以下步骤,
[0133]
s5021:对s5013确定的单因素判断矩阵和s5014确定的因素权向量,通过模糊变换建立边坡模糊评价模型,得到风险评价结果;
[0134]
s5022:根据边坡风险分类等级,确定由s5012获得的评价集中各个因素的级分,计算获得系统总得分。
[0135]
仿真实验:
[0136]
将本发明中提出的prophet-lstm算法进行工程验证,工程验证的数据来源于,贵州凯里邵家庄堆积体边坡监测数据,包括降雨量、地下水位、不同深度的位移数据,具体的验证方法为:在不考虑降雨和地下水位的情况下,分别采用lstm算法、svr算法和prophet算法进行边坡位移的预测,在考虑降雨和地下水位的情况下,分别采用lstm算法和svr算法进行边坡位移预测,最终与本发明提出的采用prophet-lstm算法进行边坡位移预测的结果进行比较分析,结果如附图10所示,在附图10中,虚垂线左侧的数据为训练集,右侧的数据为各种算法的预测结果,拥有“_rw”后缀的模型考虑了降雨和地下水位的影响。附图10表明,在不考虑降雨和地下水位的情况下,lstm算法具有较高的预测精度,也印证了lstm算法对非周期数据泛化能力差的缺点。因此,在考虑环境因素的情况下,本发明提出的prophet-lstm算法具有良好的预测性能。
[0137]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1