考虑纵向跟车行为的驾驶行为模型的参数辨识方法
1.本发明涉及辅助驾驶技术领域,尤其是一种考虑纵向跟车行为的驾驶行为模型的参数辨识方法。
背景技术:
2.在交通事故中,由于驾驶员对于自车与前车的相对速度、相对距离把握不准确以及疲劳等原因导致车辆追尾事故,逐渐占据了很大的比例。虽然目前自适应巡航技术已经发展出十分成熟的高级驾驶辅助系统,但其价格偏贵,且系统与驾驶人的交互不足,系统控制输出直接触发,几乎不考虑驾驶员的行为和个性,往往会导致驾驶员与自动控制器之间的不适应和不信任,为此,研究人员考虑驾驶员的行为特性,通过数学物理方法表征驾驶员的行为。
3.驾驶员在驾驶车辆过程中,会根据目标任务调整自己的姿势和力,实现相应的动作行为以控制车辆的运动。例如,在驾驶员操纵车辆在跟驰工况下的人机交互的任务中,驾驶员根据从自身感官获得的外部及内部信息来调节肢体的动态特性,从而调节对油门和刹车踏板的控制,实现符合其自身驾驶风格的跟车运动。
4.因此,申请人认为如果能够建立综合生理和操纵行为特征的驾驶员纵向行为模型,准确定量地描述驾驶员在操纵车辆过程中的动态特性变化,将有助于设计和开发一种新型的考虑驾驶员特性和风格的个性化纵向行为人-机系统,进而应用于个性化辅助控制器的设计与开发。
技术实现要素:
5.针对现有技术的不足,本发明提供一种考虑纵向跟车行为的驾驶行为模型的参数辨识方法,目的是准确、定量地描述驾驶员在操纵车辆过程中的动态特性变化。
6.本发明采用的技术方案如下:
7.一种考虑纵向跟车行为的驾驶行为模型的参数辨识方法,包括:
8.建立一个四阶系统表征的驾驶员纵向行为模型,其以自车与前车的相对距离d
rel
和相对速度v
rel
为输入信息,以驾驶员对油门或刹车踏板的下踏力f为中间变量,以油门或刹车踏板的角度α为输出信息,所述四阶系统综合了驾驶员生理行为环节以及足部与踏板耦合执行环节,所述驾驶员生理行为环节综合了驾驶员眼部识别输入信息及大脑反应的纯延时环节、以及大脑决策通过肌肉神经传导和响应的一阶惯性环节,所述足部与踏板耦合执行环节用一个弹簧-阻尼-质量块旋转系统来表征,四阶系统的频域表达式为:
[0009][0010]
其中,k
p
,kc分别为表征驾驶员对相对速度v
rel
和相对距离d
rel
的预操作行为的特征参数,τ
d1
为驾驶员眼部识别输入信息及大脑反应的纯延时环节的纯延时时间,τ
d2
为大脑决策通过肌肉神经传导和响应的一阶惯性环节的时间常数,转动惯量ji、阻尼系数bi、弹簧刚
度ki为弹簧-阻尼-质量块旋转系统的特征参数,throttle,brake分别代表油门和刹车,s代表复频域;其中,所述驾驶员生理行为环节是以自车与前车的相对距离d
rel
和相对速度v
rel
为输入,以驾驶员对油门和刹车踏板的下踏力f为输出的双输入单输出系统,所述足部与踏板耦合执行环节是以驾驶员生理行为环节的输出下踏力f为输入,以油门和刹车踏板的角度α为输出的单输入单输出系统;
[0011]
对所述驾驶员纵向行为模型进行第一步辨识:对所述驾驶员生理行为环节的频域传递函数,采用最小二乘辨识法对特征参数k
p
,kc,τ
d1
,τ
d2
进行辨识,获得时变的状态参数值;
[0012]
对所述驾驶员纵向行为模型进行第二步辨识:对所述足部与踏板耦合执行环节的频域传递函数,采用最小二乘辨识法对特征参数ji,bi,ki进行辨识,获得时变的状态参数值。
[0013]
进一步技术方案为:
[0014]
对所述驾驶员纵向行为模型进行第一步辨识,包括:
[0015]
建立所述驾驶员生理行为环节的频域传递函数的离散差分方程:
[0016][0017][0018][0019][0020]
其中,k代表当前采样时刻,ts为采样时间;
[0021]
针对所述离散差分方程,构建基于递推最小二乘法的第一识别模型:
[0022]
f(k)=ψ
t
θ
[0023]
ψ=[f(k-1) f(k-2) v
rel
(k)+2v
rel
(k-1)+v
rel
(k-2) d
rel
(k)+2d
rel
(k-1)+d
rel
(k-2)]
t
[0024][0025]
设置辅助变量g和h,对所述第一识别模型建立在线的带有遗忘因子r的递推最小二乘辨识算法的第一递推关系:
[0026][0027]
根据所述第一递推关系,求解每一个采样时刻的参数集合:
[0028][0029]
根据参数集合θ(k)中的每个元素与特征参数k
p
,kc,τ
d1
,τ
d2
的函数映射关系,可获取每一个采样时刻的特征参数。
[0030]
对所述驾驶员纵向行为模型进行第二步辨识,包括:
[0031]
建立所述足部与踏板耦合执行环节的频域传递函数的离散差分方程:
[0032]di
αi(k)+eiαi(k-1)+fiαi(k-2)=mi(k)+2mi(k-1)+mi(k-2)
[0033][0034][0035][0036]
i=throttle,brake
[0037]
其中,k代表当前离散时刻,ts为采样时间,mi=fil,l为下踏力f作用点到油门或刹车踏板旋转轴的距离;
[0038]
针对所述离散差分方程,构建基于递推最小二乘法的第二识别模型:
[0039]
αi(k)=φ
it
ωi[0040]
φi=[αi(k-1) αi(k-2) mi(k)+2mi(k-1)+mi(k-2)]
t
[0041][0042]
i=throttle,brake
[0043]
设置辅助变量q和r,对所述第二识别模型建立在线的带有遗忘因子r的递推最小二乘辨识算法的第二递推关系:
[0044][0045]
根据所述第二递推关系,求解每一个采样时刻的参数集合:
[0046][0047]
根据参数集合ωi(k)中的每一个元素与特征参数ji,bi,ki的函数映射关系,可获取每一个采样时刻的特征参数。
[0048]
本发明的有益效果如下:
[0049]
本发明所提出的驾驶员纵向行为模型考虑了驾驶员在半自动/自动驾驶车辆行驶中的纵向操纵作用——驾驶员生理行为环节(综合了驾驶员眼部识别输入信息及大脑反应的纯延时环节、以及大脑决策通过肌肉神经传导和响应的一阶惯性环节)以及足部与踏板耦合执行环节,从而综合了驾驶员的生理行为特征和操纵行为特征,能准确地表征驾驶员在跟驰工况下的时变行为特性。
[0050]
本发明对驾驶员纵向行为模型进行带有遗忘因子的最小二乘两步辨识方法,可在线辨识表征驾驶员行为的状态参数,获得状态参数的时变范围。从而可基于该时变范围实现考虑驾驶员行为状态参数不确定性的鲁棒共享控制器设计。可广泛应用于考虑驾驶员纵向行为的个性化辅助控制系统的研究和应用,实用性强。
[0051]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
附图说明
[0052]
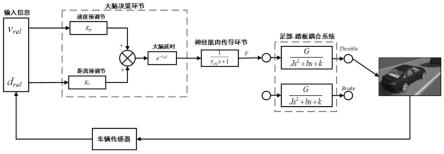
图1为本发明的驾驶员纵向行为模型的结构示意图。
[0053]
图2为本发明的驾驶员纵向行为模型的辨识方法流程图。
[0054]
图3为本发明实施例中获取的前车速度谱。
[0055]
图4为本发明实施例中驾驶员操纵下的自车与前车的相对距离结果图。
[0056]
图5为本发明实施例中驾驶员操纵下的自车与前车的相对速度结果图。
[0057]
图6为本发明实施例中驾驶员操纵下的下踏力结果图。
[0058]
图7为本发明实施例中驾驶员操纵下的踏板转动角度结果图。
[0059]
图8为本发明实施例中驾驶员的状态参数k
p
的辨识结果图。
[0060]
图9为本发明实施例中驾驶员的状态参数kc的辨识结果图。
[0061]
图10为本发明实施例中驾驶员的状态参数τ
d1
的辨识结果图。
[0062]
图11为本发明实施例中驾驶员的状态参数τ
d2
的辨识结果图。
[0063]
图12为本发明实施例中驾驶员的状态参数j
throttle
的辨识结果图。
[0064]
图13为本发明实施例中驾驶员的状态参数b
throttle
的辨识结果图。
[0065]
图14为本发明实施例中驾驶员的状态参数k
throttle
的辨识结果图。
[0066]
图15为本发明实施例中驾驶员的状态参数j
brake
的辨识结果图。
[0067]
图16为本发明实施例中驾驶员的状态参数b
brake
的辨识结果图。
[0068]
图17为本发明实施例中驾驶员的状态参数k
brake
的辨识结果图。
具体实施方式
[0069]
以下结合附图说明本发明的具体实施方式。
[0070]
本技术的一种考虑纵向跟车行为的驾驶行为模型的参数辨识方法,包括:
[0071]
建立一个以四阶系统表征的驾驶员纵向行为模型,其以自车与前车的相对距离d
rel
和相对速度v
rel
为输入信息,以驾驶员对油门或刹车踏板的下踏力f为中间变量,以油门或刹车踏板的角度α为输出信息,所述四阶系统综合了驾驶员生理行为环节以及足部与踏板耦合执行环节,所述驾驶员生理行为环节综合了驾驶员眼部识别输入信息及大脑反应的纯延时环节、以及大脑决策通过肌肉神经传导和响应的一阶惯性环节,所述足部与踏板耦合执行环节用一个弹簧-阻尼-质量块旋转系统来表征,四阶系统的频域表达式为:
[0072][0073]
其中,k
p
,kc分别为表征驾驶员对相对速度v
rel
和相对距离d
rel
的预操作行为的特征参数,τ
d1
为驾驶员眼部识别输入信息及大脑反应的纯延时环节的纯延时时间,τ
d2
为大脑决策通过肌肉神经传导和响应的一阶惯性环节的时间常数,转动惯量ji、阻尼系数bi、弹簧刚度ki为弹簧-阻尼-质量块旋转系统的特征参数,throttle,brake分别代表油门和刹车,s代表复频域;其中,所述驾驶员生理行为环节是以自车与前车的相对距离d
rel
和相对速度v
rel
为输入,以驾驶员对油门和刹车踏板的下踏力f为输出的双输入单输出系统,所述足部与踏板耦合执行环节是以驾驶员生理行为环节的输出下踏力f为输入,以油门和刹车踏板的角度α为输出的单输入单输出系统;
[0074]
对所述驾驶员纵向行为模型进行第一步辨识:对所述驾驶员生理行为环节的频域传递函数,采用最小二乘辨识法对特征参数k
p
,kc,τ
d1
,τ
d2
进行辨识,获得时变的状态参数值;
[0075]
对所述驾驶员纵向行为模型进行第二步辨识:对所述足部与踏板耦合执行环节的频域传递函数,采用最小二乘辨识法对特征参数ji,bi,ki进行辨识,获得时变的状态参数值。
[0076]
本技术的创新地提出驾驶员纵向行为模型来描述在纵向跟车工况下驾驶员的操纵特征,综合考虑了驾驶员的大脑肌肉神经生理行为特征和对脚踏板的操纵行为特征,并基于递推最小二乘法对驾驶员纵向行为模型的状态参数进行准确辨识,以获得时变的状态参数值。
[0077]
可根据本技术获得状态参数的范围,设计考虑驾驶员参数不确定性的鲁棒共享控制器,以实现高精度地个性化辅助控制系统的开发和应用。
[0078]
以下以具体实施例进一步说明本技术的技术方案。
[0079]
一、建立如图1所示的驾驶员纵向行为模型,包括:
[0080]
考虑驾驶员生理行为环节:包括考虑驾驶员的大脑决策行为,以增益k
p
,kc表征驾
驶员对相对速度和相对距离的预操作行为;考虑驾驶员眼部识别输入信息及大脑反应的纯延时环节其纯延时时间用τ
d1
表征;考虑驾驶员的神经肌肉信号传递过程,以一个时间常数为τ
d2
的一阶惯性环节表征大脑决策信息通过神经肌肉的传导和响应过程,建立驾驶员生理行为环节的频域传递函数:
[0081][0082]
式中,s代表复频域;
[0083]
通过一阶泰勒公式,将驾驶员大脑的纯延时环节按如下公式近似处理:
[0084][0085]
考虑足部对踏板加载后的驾驶员足部和踏板一致的转动运动,将驾驶员足部和油门、刹车踏板耦合成一个以踏板的旋转中心为支点的弹簧-阻尼-质量块旋转系统,来描述驾驶员的操纵行为的动态特性,并以转动惯量j、阻尼系数b、弹簧刚度k表征所述弹簧-阻尼-质量块旋转系统的系统特性,从而建立足部与踏板耦合执行环节的频域传递函数为:
[0086][0087]
mi=fil,l为下踏力作用点到刹车/油门踏板旋转轴的距离,本实施例取刹车/油门踏板中心点到旋转轴的距离;
[0088]
其中,驾驶员纵向行为模型的输入信息、输出信息和中间变量的获取,包括:在自车车头安装激光雷达,采集自车与前车的相对速度v
rel
和相对距离d
rel
;在油门踏板、刹车踏板背面安装惯导传感器,采集踏板的角度α
throttle
,α
brake
;在油门踏板、刹车踏板正面安装力传感器,采集驾驶员对油门/刹车踏板的下踏力f。
[0089]
至此,获得综合了驾驶员生理行为环节(综合了驾驶员眼部识别输入信息及大脑反应的纯延时环节、以及大脑决策通过肌肉神经传导和响应的一阶惯性环节)以及足部与踏板耦合执行环节表示为双输入单输出的四阶系统的驾驶员纵向行为模型,频域表达式如式(1)所示;
[0090]
二、参见图2,对所构建的驾驶员纵向行为模型进行参数辨识,以下踏力f作为中间变量,第一步辨识驾驶员生理行为环节中的特征参数,第二步辨识足部与踏板耦合执行环节中的特征参数,并且驾驶员生理行为环节是以自车与前车的相对距离d
rel
和相对速度v
rel
为输入,以驾驶员对油门和刹车踏板的下踏力f为输出的双输入单输出系统,足部与踏板耦合执行环节是以驾驶员生理行为环节的输出下踏力f为输入,以油门和刹车踏板的角度α为输出的单输入单输出系统,具体包括:
[0091]
对式(2)所示的驾驶员生理行为环节的频域传递函数进行通过双线性变化法则映射到z平面,即做s复频域到极坐标域z域变换的变量代换:
[0092][0093]
式(5)中,ts为采样时间,得z平面的表达式为:
[0094][0095]
整理式(6),将z平面的表达式转化到离散时域中,得到离散差分方程为:
[0096][0097]
式(7)中,k代表当前采样时刻,ts为采样时间;
[0098]
针对式(7)的离散差分方程,构建基于递推最小二乘法的第一识别模型:
[0099][0100]
设置辅助变量g和h,对式(8)的第一识别模型建立在线的带有遗忘因子r的递推最小二乘辨识算法的第一递推关系:
[0101][0102]
根据式(9)的第一递推关系,求解每一个采样时刻的参数集合:
[0103][0104]
根据参数集合θ(k)中的每个元素与特征参数k
p
,kc,τ
d1
,τ
d2
的函数映射关系,可获取每一个采样时刻的特征参数。
[0105]
对式(4)所示的足部与踏板耦合执行环节的频域传递函数进行通过双线性变化法则映射到z平面,即做s复频域到极坐标域z域变换的变量代换,即将式(5)代入式(4)中,得z平面的表达式为:
[0106][0107]
整理式(11),将其转化到离散时域中,获得所述足部与踏板耦合执行环节的频域传递函数的离散差分方程:
[0108][0109]
其中,k代表当前离散时刻,ts为采样时间,mi=fil,l为下踏力f作用点到油门或刹车踏板旋转轴的距离;
[0110]
针对式(12)所示的离散差分方程,构建基于递推最小二乘法的第二识别模型:
[0111][0112]
设置辅助变量q和r,对式(13)所示的第二识别模型建立在线的带有遗忘因子r的递推最小二乘辨识算法的第二递推关系:
[0113][0114]
根据式(14)所示的第二递推关系,求解每一个采样时刻的参数集合:
[0115][0116]
根据参数集合ωi(k)中的每一个元素与特征参数ji,bi,ki的函数映射关系,可获取每一个采样时刻特征参数。
[0117]
这样,由两步辨识方法可以获得考虑纵向跟车行为的驾驶员纵向行为模型的四阶系统的全部参数。
[0118]
为了验证本实施例方法的有效性,以下为驾驶员在驾驶模拟器半实物仿真实验平台上进行试验,在matlab/simulink-prescan联合仿真实验软件环境下进行驾驶员纵向行为特征参数的在线辨识。
[0119]
参照nedc工况的速度谱设置前车速度,根据nedc循环工况中的城郊工况分别设置前车速度,所设置的前车速度如图3所示。所采集到的系统输入信息、中间变量和输出信息分别如图4至图7所示。
[0120]
自车速度由驾驶员操作驾驶模拟器油门和刹车踏板控制,自车和前车的转向控制均被切断,不考虑横向运动。
[0121]
选择一位驾驶员在所设置的实验场景下进行试验,在试验过程中,驾驶员以右脚操作油门或刹车踏板,且驾驶员不允许同时踩踏油门和刹车踏板。
[0122]
实验记录驾驶员的操纵油门、刹车踏板的角度、下踏力和与前车的相对速度、相对距离,通过辨识算法求解的驾驶员特征参数。所有实验结果见图8至图17。
[0123]
本实施例的方法能够准确地描述驾驶员的纵向跟车状态下的行为特性,高效地求解模型中如图2中所示七个特征参数的时变范围,从而准确地获得驾驶员在操纵车辆过程中的动态特性变化。以所获得特征参数时变范围值为依据,可在后续开发过程中,设计考虑驾驶员参数不确定性的鲁棒共享控制器,以实现高精度地个性化辅助控制系统的开发和应用。
[0124]
上述仅为本发明的构思作举例说明。本发明亦可以针对具体交通环境场景和具体驾驶员特性对驾驶员纵向模型和辨识算法进行微调和改进,凡对本发明进行的非实质性的改动,均应属于侵犯本发明保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1