一种智能镜、身高测量方法、装置、处理器及介质与流程
本技术涉及智能家居,尤其涉及一种智能镜、身高测量方法、装置、处理器及介质。
背景技术:
1、智能镜为了获取人体身高信息,往往采用激光雷达、深度摄像头和结构光立体摄像头来获取人体的身高。现有技术存在的问题是激光雷达、深度摄像头和结构光立体摄像头价格昂贵,特别对于大批量生产的智能设备更是提高了生产成本。
2、相关技术为了降低成本,采用rgb摄像头实现身高测量,如申请公布号cn114782351a公开的目标物的高度测量方法及显示设备。其具体公开了显示设备包括:显示面板,处理器,以及沿显示面板的高度方向依次设置的第一摄像头和第二摄像头,第一摄像头的视场角像素密度与第二摄像头的视场角像素密度不同,处理器用于:基于第一摄像头的视场角像素密度、第二摄像头的视场角像素密度和第一图像中目标物的目标特征点与第一参考线的第一距离,确定第一距离在第二图像中的等效距离;基于等效距离与第二图像中目标特征点与第二参考线的第二距离之和,以及第一摄像头与第二摄像头目标距离,确定物理距离与第二图像中的像素距离的比例。基于目标物在第二图像中的像素高度和比例,得到目标物的物理高度。
3、cn114782351a提供的高度测量方案中,必不可少的需要根据第一摄像头的视场角像素密度和第二摄像头的视场角像素密度,确定映射比例,进而才能实现进行后续物理高度的测量。这就需要专业人员对rgb摄像头的视场角进行校准。相关技术存在的问题是,rgb摄像头视场角校准的过程繁琐,耗时较长,显示设备出厂后由专业人员对rgb摄像头的视场角进行校准会造成很大程度的人力资源浪费,并且校准得到的视场角的精度也无法保证,一旦视场角校准不准确,直接导致物理高度测量不准确。
技术实现思路
1、本技术实施例提供了一种智能镜、身高测量方法、装置、处理器及介质,用以解决相关技术中rgb摄像头视场角校准的过程繁琐,且校准得到的视场角的精度也无法保证,一旦视场角校准不准确,直接导致物理高度测量不准确的问题。
2、第一方面,本技术提供了一种智能镜,所述智能镜包括:显示面板,处理器,以及沿所述显示面板的高度方向依次设置的第一摄像头和第二摄像头;
3、所述第一摄像头,用于采集第一图像并发送至所述处理器;
4、所述第二摄像头,用于采集第二图像并发送至所述处理器,其中,所述第二图像中包含完整的目标对象;
5、所述处理器,用于执行:
6、获取所述第一图像中所述目标对象的纵向高度不同的第一关键点和第二关键点,确定所述第二图像中与所述第一关键点对应的第三关键点以及与所述第二关键点对应的第四关键点;
7、根据所述第一关键点和第二关键点的第一纵向距离以及第三关键点和第四关键点的第二纵向距离,确定图像间的第一映射比例;根据所述图像间的第一映射比例以及所述第一摄像头和第二摄像头的纵向物理距离,确定图像距离与物理距离的第二映射比例;
8、根据所述目标对象在所述第二图像中的第三纵向距离和所述第二映射比例,确定所述目标对象的物理高度。
9、进一步地,所述处理器,用于执行:
10、获取所述第一图像中所述目标对象的第五关键点和第一中心参考点的第四纵向距离,根据所述第一映射比例将所述第四纵向距离映射到所述第二图像中,得到第五纵向距离;
11、确定所述第二图像中的与所述第五关键点对应的第六关键点,获取所述第二图像中的所述第六关键点和第二中心参考点的第六纵向距离,根据所述第五纵向距离、所述第六纵向距离以及所述第一摄像头和第二摄像头的纵向物理距离,确定图像距离与物理距离的第二映射比例。
12、进一步地,所述处理器,用于执行:
13、若所述第六关键点位于所述第二中心参考点之上,确定所述第五纵向距离与所述第六纵向距离的和值,根据所述和值以及所述第一摄像头和第二摄像头的纵向物理距离,确定图像距离与物理距离的第二映射比例;
14、若所述第六关键点位于所述第二中心参考点之下,确定所述第五纵向距离与所述第六纵向距离的差值,根据所述差值以及所述第一摄像头和第二摄像头的纵向物理距离,确定图像距离与物理距离的第二映射比例。
15、进一步地,所述处理器,用于执行:
16、通过人体骨骼点检测算法,确定第二图像中与所述第一关键点对应的第三关键点、与所述第二关键点对应的第四关键点、与所述第五关键点对应的第六关键点。
17、进一步地,所述处理器,用于执行:
18、若所述第一图像中包含多个对象,通过人体检测算法确定各个对象各自的第一人体检测框;将面积最大的第一人体检测框对应的对象作为目标对象。
19、进一步地,所述处理器,用于执行:
20、若所述第二图像中包含多个对象,通过人体检测算法确定各个对象各自的第二人体检测框;
21、针对每个第二人体检测框,确定该第二人体检测框的第一中心像素点与所述第二图像的第二中心像素点的横坐标欧式距离;将横坐标欧式距离最小的第二人体检测框对应的对象作为目标对象。
22、进一步地,所述处理器,用于执行:
23、根据预先确定的物理高度测量值与误差值的拟合关系,对所述目标对象的物理高度进行修正。
24、第二方面,本技术提供了一种身高测量方法,所述方法包括:
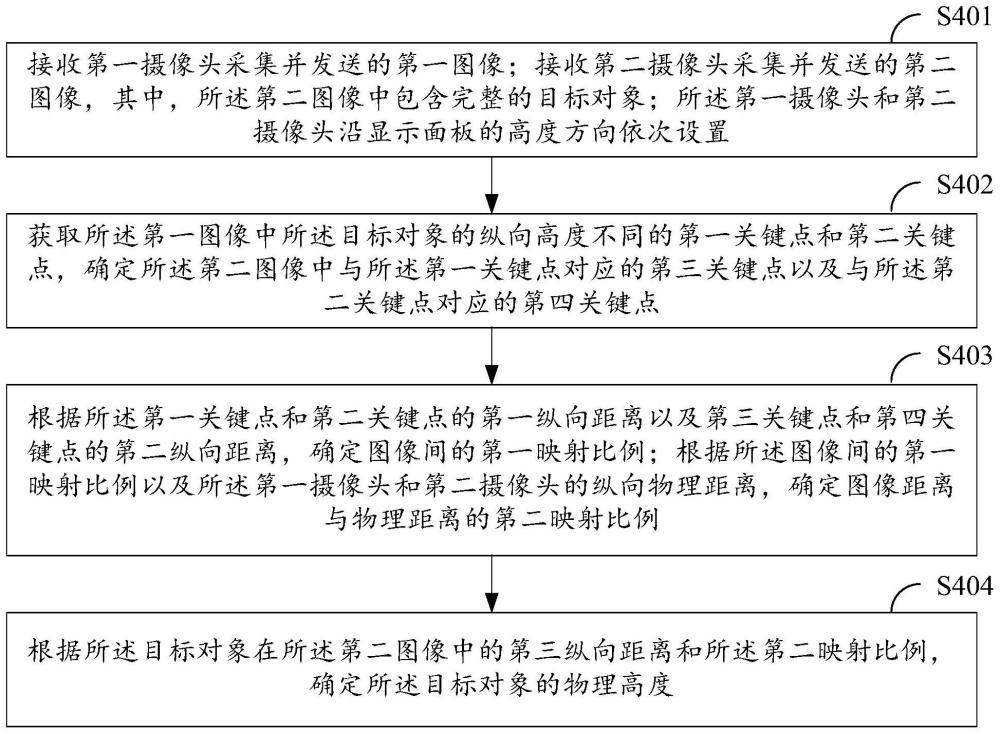
25、接收第一摄像头采集并发送的第一图像;接收第二摄像头采集并发送的第二图像,其中,所述第二图像中包含完整的目标对象;所述第一摄像头和第二摄像头沿显示面板的高度方向依次设置;
26、获取所述第一图像中所述目标对象的纵向高度不同的第一关键点和第二关键点,确定所述第二图像中与所述第一关键点对应的第三关键点以及与所述第二关键点对应的第四关键点;
27、根据所述第一关键点和第二关键点的第一纵向距离以及第三关键点和第四关键点的第二纵向距离,确定图像间的第一映射比例;根据所述图像间的第一映射比例以及所述第一摄像头和第二摄像头的纵向物理距离,确定图像距离与物理距离的第二映射比例;
28、根据所述目标对象在所述第二图像中的第三纵向距离和所述第二映射比例,确定所述目标对象的物理高度。
29、第三方面,本技术提供了一种身高测量装置,所述装置包括:
30、接收模块,用于接收第一摄像头采集并发送的第一图像;接收第二摄像头采集并发送的第二图像,其中,所述第二图像中包含完整的目标对象;所述第一摄像头和第二摄像头沿显示面板的高度方向依次设置;
31、第一确定模块,用于获取所述第一图像中所述目标对象的纵向高度不同的第一关键点和第二关键点,确定所述第二图像中与所述第一关键点对应的第三关键点以及与所述第二关键点对应的第四关键点;
32、第二确定模块,用于根据所述第一关键点和第二关键点的第一纵向距离以及第三关键点和第四关键点的第二纵向距离,确定图像间的第一映射比例;根据所述图像间的第一映射比例以及所述第一摄像头和第二摄像头的纵向物理距离,确定图像距离与物理距离的第二映射比例;
33、第三确定模块,用于根据所述目标对象在所述第二图像中的第三纵向距离和所述第二映射比例,确定所述目标对象的物理高度。
34、第四方面,本技术提供了一种处理器,包括处理单元、通信接口、存储单元和通信总线,其中,处理单元,通信接口,存储单元通过通信总线完成相互间的通信;
35、存储单元,用于存放计算机程序;
36、处理单元,用于执行存储单元上所存放的程序时,实现上述方法步骤。
37、第五方面,本技术提供了一种计算机存储可读存储介质,所述计算机可读存储介质内存储有可由处理器执行的计算机程序,当所述程序在所述处理器上运行时,使得所述处理器执行时实现上述方法步骤。
38、本技术提供了一种智能镜、身高测量方法、装置、处理器及介质,所述智能镜包括:显示面板,处理器,以及沿所述显示面板的高度方向依次设置的第一摄像头和第二摄像头;所述第一摄像头,用于采集第一图像并发送至所述处理器;所述第二摄像头,用于采集第二图像并发送至所述处理器,其中,所述第二图像中包含完整的目标对象;所述处理器,用于执行:获取所述第一图像中所述目标对象的纵向高度不同的第一关键点和第二关键点,确定所述第二图像中与所述第一关键点对应的第三关键点以及与所述第二关键点对应的第四关键点;根据所述第一关键点和第二关键点的第一纵向距离以及第三关键点和第四关键点的第二纵向距离,确定图像间的第一映射比例;根据所述图像间的第一映射比例以及所述第一摄像头和第二摄像头的纵向物理距离,确定图像距离与物理距离的第二映射比例;根据所述目标对象在所述第二图像中的第三纵向距离和所述第二映射比例,确定所述目标对象的物理高度。
39、上述的技术方案具有如下优点或有益效果:
40、由于在本技术中,处理器接收到第一摄像头采集并发送的第一图像以及第二摄像头采集并发送的第二图像之后,根据第一图像中目标对象的第一关键点和第二关键点的第一纵向距离,以及第二图像中对应的第三关键点和第四关键点的第二纵向距离,确定图像间的第一映射比例,进而根据第一映射比例以及第一摄像头和第二摄像头的纵向物理距离,确定图像距离与物理距离的第二映射比例,最后根据第二映射比例,实现对目标对象的物理高度测量。不需要对第一摄像头和第二摄像头进行视场角的校正,避免了相关技术中摄像头视场角校准的过程繁琐,且校准得到的视场角的精度也无法保证,一旦视场角校准不准确,直接导致物理高度测量不准确的问题。
- 还没有人留言评论。精彩留言会获得点赞!