共同车辆电源管理的制作方法
1.本公开涉及用于车辆电源管理的系统和技术。
背景技术:
2.电动车辆的类型包括插电式混合动力电动车辆(phev)、混合动力电动车辆(hev)和电池电动车辆(bev)。电动车辆包括电动推进装置,其产生能量并且将能量转化成电动车辆的运动。电动推进装置可以是纯电动动力传动系统,其包括电池、电动马达和将旋转运动传递到车轮的变速器;或混合动力传动系统,其包括常规动力传动系统的元件和纯电动动力传动系统的元件。
技术实现要素:
3.本公开描述了用于管理用来为电机供电的一组电动车辆的能量消耗的系统和技术。所述系统可以扩展电动车辆和电机的性能,包括延长电动车辆中的一个或多个在执行任务时可以在某个位置处为电机供电的时间。
4.计算机可以将电动车辆和电机分配到电机将执行特定任务的位置。所述分配可以基于电动车辆和电机所保持的电量、行驶到所述位置的电动车辆的预期能量消耗以及执行任务的电机的预期能量消耗。如果电动车辆和其相关联的电机中的一者没有足够的共同电量来行驶到其分配的位置并执行该位置的任务,则可以执行缓解操作,从而提供足够的电量。例如,来自该组的另一电动车辆可以在第二位置处与所述电动车辆会合并对其充电。其他示例包括在第三位置处充电、在要执行任务的位置处充电以及与另一电动车辆交换电机。所述系统可以帮助确保电动车辆和电机具有足够的电量来执行任务,同时最小化该组电动车辆的总功率汲取。
5.一种计算机包括处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以接收指示多个电动车辆和多个电机的电量的数据,所述电动车辆包括第一电动车辆和第二电动车辆,所述电机与相应的电动车辆相关联;接收要在多个位置处执行的多个任务,所述位置包括第一位置;基于所述电动车辆和电机的所述电量以及所述电动车辆行驶到所述位置和所述电机在所述位置处执行所述任务的预期能量消耗来将所述电动车辆分配给所述位置,所述第一电动车辆被分配给所述第一位置;以及响应于所述第一电动车辆和与所述第一电动车辆相关联的所述电机的所述电量之和小于所述第一电动车辆行驶到所述第一位置和与所述第一电动车辆相关联的所述电机在所述第一位置处执行所述任务的所述预期能量消耗之和,指示所述第二电动车辆行驶到所述第一电动车辆将位于的第二位置。
6.所述第二位置可以是所述第一位置。
7.所述第二位置可以不包括在所述多个位置中,并且所述指令还可以包括用于指示所述第一电动车辆在行驶到所述第一位置之前行驶到所述第二位置的指令。
8.所述指令还可以包括用于指示所述电动车辆在离开所述位置之后将所述电机再
充电到相应的预定电量水平的指令。所述预定电量水平可能低于充满电。所述指令还可以包括用于以下操作的指令:响应于在所述相应位置处执行所述相应任务之后所述电机中的一个被充电到高于所述相应预定电量水平,指示所述相应电动车辆从该电机再充电直到该电机达到所述相应的预定电量水平。
9.所述预定电量水平可能低于半充电。
10.所述电动车辆可以包括第三电动车辆,所述多个位置可以包括所述第三电动车辆被分配到的第三位置,并且所述指令还可以包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述电量之和小于所述第三电动车辆行驶到所述第三位置和与所述第三电动车辆相关联的所述电机在所述第三位置处执行所述任务的所述预期能量消耗之和,指示所述第三电动车辆在行驶到所述第三位置之前在第四位置处充电。所述多个位置可以是作业位置,所述电动车辆可以在行驶到所述作业位置之前位于包括所述第四位置的多个存放位置处,并且所述存放位置可以彼此分开。
11.所述电动车辆可以包括第三电动车辆,所述多个位置可以包括所述第三电动车辆被分配到的第三位置,并且所述指令还可以包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述电量之和小于所述第三电动车辆行驶到所述第三位置和与所述第三电动车辆相关联的所述电机在所述第三位置处执行所述任务的所述预期能量消耗之和,指示所述第三电动车辆在所述第三位置处再充电。所述多个位置可以是作业位置,所述电动车辆可以在行驶到所述作业位置之前位于多个存放位置处,并且所述存放位置可以不与所述作业位置重叠。
12.所述指令还可以包括用于以下操作的指令:在所述位置处执行所述任务之后,指示所述电动车辆输出指示所述电动车辆和所述电机的实际能量消耗的数据。所述电动车辆可以包括第三电动车辆,所述多个位置可以包括所述第三电动车辆被分配到的第三位置,并且所述指令还可以包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述电量之和小于所述第三电动车辆行驶到所述第三位置和与所述第三电动车辆相关联的所述电机在所述第三位置处执行所述任务的所述预期能量消耗之和,输出消息。
13.所述电动车辆可以包括第三电动车辆,所述多个位置可以包括所述第三电动车辆被分配到的第三位置,并且所述指令还可以包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述电量之和小于所述第三电动车辆行驶到所述第三位置和与所述第三电动车辆相关联的所述电机在所述第三位置处执行所述任务的所述预期能量消耗之和,指示所述第三电动车辆传输来自所述第三电动车辆的相机的数据。
14.所述电动车辆可以包括第三电动车辆,所述多个位置可以包括所述第三电动车辆被分配到的第三位置,并且所述指令还可以包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述电量之和小于所述第三电动车辆行驶到所述第三位置和与所述第三电动车辆相关联的所述电机在所述第三位置处执行所述任务的所述预期能量消耗之和,指示所述第三电动车辆禁用所述第三电动车辆的充电端口。
15.所述多个位置可以彼此分开。
16.所述任务可以包括多种类型的所述任务,并且执行不同类型的任务的所述电机的所述预期能量消耗可以不同。所述电机可以包括与相应类型的所述任务相关联的多种类型的所述电机。
17.所述指令还可以包括用于指示所述电动车辆经由所述电动车辆的充电端口对所述相应电机充电的指令。
18.一种方法包括接收指示多个电动车辆和多个电机的电量的数据,所述电动车辆包括第一电动车辆和第二电动车辆,所述电机与相应的电动车辆相关联;接收要在多个位置处执行的多个任务,所述位置包括第一位置;基于所述电动车辆和电机的所述电量以及所述电动车辆行驶到所述位置和所述电机在所述位置处执行所述任务的预期能量消耗来将所述电动车辆分配给所述位置,所述第一电动车辆被分配给所述第一位置;以及响应于所述第一电动车辆和与所述第一电动车辆相关联的所述电机的所述电量之和小于所述第一电动车辆行驶到所述第一位置和与所述第一电动车辆相关联的所述电机在所述第一位置处执行所述任务的所述预期能量消耗之和,指示所述第二电动车辆行驶到所述第一电动车辆将位于的第二位置。
附图说明
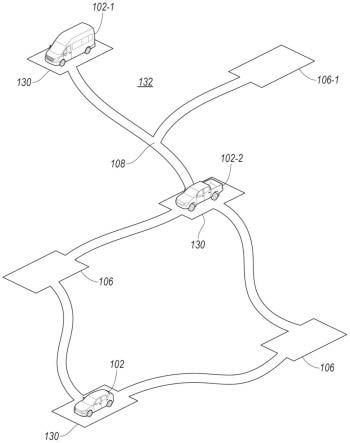
19.图1是一组示例性电动车辆的图示。
20.图2是电动车辆中的一者的框图。
21.图3是该组电动车辆行驶到的示例性位置的图示。
22.图4是用于管理该组车辆的能量消耗的示例性过程的过程流程图。
具体实施方式
23.参考附图,其中相同的数字贯穿全部若干视图指示相同的零部件,计算机100包括处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以:接收指示多个电动车辆102和多个电机104的电量的数据,电动车辆102包括第一电动车辆102-1和第二电动车辆102-2,电机104与相应的电动车辆102相关联;接收要在多个作业位置106处执行的多个任务,作业位置106包括第一作业位置106-1;基于电动车辆102和电机104的电量以及电动车辆102行驶到作业位置106和电机104在作业位置106处执行任务的预期能量消耗来将电动车辆102分配给作业位置106,第一电动车辆102-1被分配给第一作业位置106-1;以及响应于第一电动车辆102-1和与第一电动车辆102-1相关联的电机104的电量之和小于第一电动车辆102-1行驶到第一作业位置106-1和与第一电动车辆102-1相关联的电机104在第一作业位置106-1处执行任务的预期能量消耗之和,指示第二电动车辆102-2行驶到第一电动车辆102-1将位于的第二位置108。
24.参考图1,计算机100是基于微处理器的计算装置,例如,通用计算装置(其包括处理器和存储器、电子控制器或类似装置)、现场可编程门阵列(fpga)、专用集成电路(asic)、前述各者的组合等。通常,在电子设计自动化中使用诸如vhdl(超高速集成电路硬件描述语言)的硬件描述语言来描述诸如fpga和asic的数字和混合信号系统。例如,asic是基于制造前提供的vhdl编程而制造的,而fpga内部的逻辑部件可以基于例如存储在电连接到fpga电路的存储器中的vhdl编程来配置。因此,计算机100可以包括处理器、存储器等。计算机100
的存储器可以包括用于存储可由处理器执行的指令以及用于电子存储数据和/或数据库的介质,和/或计算机100可以包括诸如提供编程的前述结构的结构。计算机100可以是耦合在一起的多个计算机。
25.计算机100可以通信地耦合到用户界面110。用户界面110向计算机100的操作员呈现信息并从所述操作员接收信息。用户界面110可以包括用于向操作员提供信息的刻度盘、数字读出装置、屏幕、扬声器等,例如,诸如已知的人机界面(hmi)元件。用户界面110可以包括用于从操作员接收信息的键盘、按钮、旋钮、小键盘、触摸屏、鼠标、传声器等。
26.计算机100可以经由网络112与电动车辆102和电机104通信。网络112表示计算机100可以借助来与远程服务器进行通信的一种或多种机制。因此,网络112可以是各种有线或无线通信机制中的一种或多种,包括有线(例如,电缆和光纤)和/或无线(例如,蜂窝、无线、卫星、微波和射频)通信机制的任何期望的组合,以及任何期望的网络拓扑(或利用多种通信机制时的拓扑)。示例性通信网络包括提供数据通信服务的无线通信网络(例如,使用蓝牙、ieee 802.11等)、局域网(lan)和/或广域网(wan),包括互联网。
27.电动车辆102可以是任何乘用车或商用车,诸如轿车、卡车、运动型多用途车、跨界车、货车、小型货车、出租车、公共汽车等。每个电动车辆102包括电动推进装置114,如下所述。电动车辆102可以是插电式混合动力电动车辆(phev)、混合动力电动车辆(hev)、电池电动车辆(bev)等。
28.电机104是依靠电流(直流电或交流电)操作的机器,例如工具。电机104可以从外部电源(诸如电动车辆102中的一个)操作。替代地或另外地,电机104可以包括可从外部电源(诸如电动车辆102中的一个)再充电的电机电池116。电机电池116可以是任何合适的类型,例如锂离子电池、镍金属氢化物电池、铅酸电池、超级电容器等。具有电机电池116的每个电机104可以具有电量,即存储在电机电池116中的能量的量。电机104可以由电动车辆102可运输,即,其尺寸被设计成使得电动车辆102中的一个可以承载电机104中的至少一个。电机104包括多种类型,例如,用于建筑、管道、木工、电气工程等的设备,诸如手提钻、砂光机、钻机、钉枪、圆锯、照明等。
29.电机104可以与相应的电动车辆102相关联,即,每个电机104可以与电动车辆102中的一个相关联。计算机100可以将电机104与电动车辆102之间的关联存储在存储器中。多个电机104可以与电动车辆102中的一个相关联。例如,电机104可以存储在与其相关联的电动车辆102中。
30.参考图2,每个电动车辆102可以包括车辆计算机118。车辆计算机118为基于微处理器的计算装置,例如,通用计算装置(其包括处理器和存储器、电子控制器或类似装置)、现场可编程门阵列(fpga)、专用集成电路(asic)、前述各者的组合等。通常,在电子设计自动化中使用诸如vhdl(超高速集成电路硬件描述语言)的硬件描述语言来描述诸如fpga和asic之类的数字和混合信号系统。例如,asic是基于制造前提供的vhdl编程而制造的,而fpga内部的逻辑部件可以基于例如存储在电连接到fpga电路的存储器中的vhdl编程来配置。因此,车辆计算机118可以包括处理器、存储器等。车辆计算机118的存储器可以包括用于存储可由处理器执行的指令以及用于电子存储数据和/或数据库的介质,和/或车辆计算机118可以包括诸如提供编程的前述结构的结构。车辆计算机118可以是电动车辆102上耦合在一起的多个计算机。
31.车辆计算机118可以通过通信网络120(诸如控制器局域网(can)总线、以太网、wifi、局域互连网(lin)、车载诊断连接器(obd-ii))和/或通过任何其他有线或无线通信网络传输和接收数据。车辆计算机118可以经由通信网络120通信地耦合到电动推进装置114、收发器122、充电端口124、相机126和其他部件。
32.车辆的电动推进装置114产生能量并且将能量转化成车辆的运动。电动推进装置114可以是纯电动动力传动系统,其包括车辆电池128、电动马达和将旋转运动传递到车轮的变速器;混合动力传动系统,所述混合动力传动系统包括常规动力传动系统和纯电动动力传动系统的元件;等等。车辆电池128可以是用于车辆电气化的任何合适的类型,例如,锂离子电池、镍金属氢化物电池、铅酸电池、超级电容器等。每个电动车辆102可以具有电量,即存储在该电动车辆102的车辆电池128中的能量的量。电动推进装置114可以包括与车辆计算机118和/或人类操作员通信并且从其接收输入的电子控制单元(ecu)等。人类操作员可以经由例如加速踏板和/或变速杆来控制电动推进装置114。
33.收发器122可以适于通过任何合适的无线通信协议(诸如蜂窝、、低功耗(ble)、超宽带(uwb)、wifi、ieee802.11a/b/g/p、蜂窝-v2x(cv2x)、专用短程通信(dsrc)、其他rf(射频)通信等)无线地传输信号。收发器122可以适于与远程服务器(即,与车辆不同且间隔开的服务器)通信。远程服务器可以位于电动车辆102的外部。例如,远程服务器可以与另一个车辆相关联(例如,v2v通信),与基础设施部件相关联(例如,v2i通信),与紧急响应者相关联,与和电动车辆102的所有者相关联的移动装置相关联,经由网络112与计算机100相关联等。收发器122可以是一个装置或可以包括单独的发射器和接收器。
34.充电端口124是操作员可以将非车辆负载(即,并非电动车辆102的一部分的电气负载,例如,电机104)电连接到的特征。充电端口124可以是非车辆负载可以牢固且临时地附接到的任何类型的特征。例如,充电端口124可以是螺柱,非车辆负载可以通过夹紧或拧紧来电连接到所述螺柱。对于另一示例,充电端口124可以是电连接器可以插入其中的插座。
35.相机126可以检测在某个波长范围内的电磁辐射。例如,相机126可以检测可见光、红外辐射、紫外光或包括可见光、红外光和/或紫外光的某个范围的波长。例如,相机126可以是电荷耦合装置(ccd)、互补金属氧化物半导体(cmos)或任何其他合适的类型。
36.参考图3,电动车辆102可以在行驶到作业位置106之前位于多个存放位置130处。存放位置130可以是相应电动车辆102在不使用时所坐落的指定位置。一些或所有存放位置130可以配备有充电器,用于例如从能量电网为电动车辆102充电。存放位置130可以彼此分开,即分布在大的地理区域132上,诸如城市或都市区。存放位置130可以是永久性的,即每天保持不变。存放位置130可以存储在计算机100的存储器中。
37.作业位置106是任务所在的位置。每个作业位置106可以具有在那里执行的一个或多个任务。随着执行任务和发出新任务,作业位置106可能每天都在变化。作业位置106和存放位置130可以彼此不重叠;即,位置可以是作业位置106或存放位置130,但通常不是两者。作业位置106可以彼此分开,即分布在大的地理区域132上。
38.大的地理区域132可以包括存放位置130和作业位置106,并且存放位置130和作业位置106可以散布在地理区域132中。换句话说,作业位置106可以位于存放位置130之间,并
且反之亦然。
39.电动车辆102将电机104从相应的存放位置130运输到相应的作业位置106,使得电机104可以执行任务。计算机100可以例如通过经由网络112和收发器122传输消息来指示电动车辆102从相应的存放位置130行驶到相应的作业位置106。所述消息可以由相应电动车辆102的操作员读取,所述操作员然后可以操作电动车辆102以从存放位置130行驶到作业位置106,或者响应于接收到消息,电动车辆102可以自主地操作以从存放位置130行驶到作业位置106。电动车辆102致动电动推进装置114以从相应的存放位置130行驶到相应的作业位置106,从而消耗来自车辆电池128的能量。
40.计算机100可以估计从存放位置130行驶到作业位置106的电动车辆102的预期能量消耗。出于本公开的目的,“预期能量消耗”被定义为在执行动作之前估计的用于执行动作的能量的量。动作可以是例如行驶到作业位置106、执行任务等。计算机100可以基于如已知的电动车辆102的类型、从存放位置130到作业位置106的行驶距离、沿着从存放位置130到作业位置106的路线的道路的类型和速度限制、沿着所述路线的交通等来估计电动车辆102中的一个从存放位置130行驶到作业位置106的预期能量消耗。
41.计算机100可以例如在诸如第二天的时间段内接收要在所述位置处执行的多个任务。任务可以是多种类型,例如,浇注混凝土、建造砖墙、建造内墙、安装卫生洁具等。任务的类型可以是存储在计算机100的存储器中的预设类型。每个任务可以具有要执行任务的作业位置106中的一个。作业位置106可以具有在那里执行的一个或多个任务。
42.每种类型的任务可以具有被指定用于执行所述任务的一种或多种类型的电机104。用于相应类型的任务的指定类型的电机104可以存储在计算机100的存储器中。例如,可以指定钉枪和圆锯用于建造内墙,可以指定混凝土搅拌机用于浇注混凝土,等等。
43.任务可以具有用于执行任务的相应预期能量消耗。不同类型的任务的预期能量消耗是不同的。任务的预期能量消耗可以基于任务的类型。例如,安装水池可以具有存储在计算机100的存储器中的预设预期能量消耗。任务的预期能量消耗还可以基于表征任务范围的一个或多个值。例如,安装内墙的预期能量消耗可以基于墙的长度,浇注混凝土的预期能量消耗可以基于浇注混凝土的表面积等。计算机100可以存储基于表征任务范围的值确定预设任务类型的预期能量消耗的公式,例如,接收内墙的长度并输出安装墙的预期能量消耗的公式,接收要填充混凝土的表面积并输出浇注混凝土的预期能量消耗的公式,等等。
44.计算机100可以接收指示电动车辆102和电机104的电量的数据。计算机100可以在将电动车辆102分配给位置时使用数据,如将在下面描述。对于每个电动车辆102,该电动车辆102和与该电动车辆102相关联的电机104的电量之和可用于从存放位置130行驶到作业位置106(一旦被分配)并执行该作业位置106的任务。
45.基于电动车辆102和电机104的电量以及电动车辆102行驶到作业位置106和电机104在所述位置处执行任务的预期能量消耗,计算机100将电动车辆102分配给位置。计算机100可以将电动车辆102分配给作业位置106,以便例如使总预期能量消耗最小化,使电动车辆102行驶的总距离最小化,使电动车辆102及其相关联的电机104的电量之和大于行驶到分配的作业位置106和执行分配的任务的预期能量消耗的该电动车辆102的数量最大化,优化前述变量中的一者以上的成本函数等。计算机100可以使用例如已知的线性规划技术来确定分配。分配可以受到哪些电动车辆102具有在相应作业位置106处的任务类型所需的类
型的相关联电机104的约束。
46.一旦计算机100进行了分配,计算机100就可以确定分配给作业位置106的每个电动车辆102是否具有用于该作业位置106的足够的车载总电量。具体地,计算机100可以确定电动车辆102的电量和与该电动车辆102相关联的电机104的电量之和是否小于或至少与电动车辆102从其存放位置130行驶到分配的作业位置106和电机104在分配的作业位置106处执行任务的预期能量消耗之和一样大,即,qv+σq
t
《e
行驶
+σe
任务
或qv+σq
t
≥e
行驶
+σe
任务
,其中qv是电动车辆102的电量,q
t
是与电动车辆102相关联的电机104中的一者的电量,e
行驶
是从存放位置130行驶到作业位置106的预期能量消耗,并且e
任务
是任务中的一者的预期能量消耗。
47.如果对于分配给第一作业位置106-1的第一电动车辆102-1,电量之和小于预期能量消耗之和,即,qv+σq
t
《e
行驶
+σe
任务
,计算机100可以指示用户界面110输出多个缓解策略。缓解策略可以包括指示第二电动车辆102-2对第一电动车辆102-1充电,指示第一电动车辆102-1在第二位置108处充电,指示第一电动车辆102-1在第一作业位置106-1处充电,并且与第二电动车辆102-2交换电机104和分配的作业位置106,如下面将各自被描述。操作员可以通过用户界面110选择缓解策略中的一者,并且计算机100可以在接收到所述选择时相应地指示电动车辆102。
48.第一缓解策略是指示第二电动车辆102-2行驶到第一电动车辆102-1将位于的第二位置108,然后对第一电动车辆102-1充电。计算机100可以指示第一电动车辆102-1在第二位置108处从第二电动车辆102-2再充电。
49.计算机100可以选择第二电动车辆102-2用于第一缓解策略。例如,可以基于未被分配给作业位置106而从电动车辆102中选择第二电动车辆102-2。对于另一示例,可以基于具有过量电量以弥补第一电动车辆102-1的电量不足,即,基于第二电动车辆102-2和与第二电动车辆102-2相关联的电机104的电量之和大于第一电动车辆102行驶到第一位置并执行任务的预期能量消耗减去第一电动车辆102和与第一电动车辆102相关联的电机104的电量之间的差值,即,q
v2
+σq
t2
》e
行驶
+σe
任务
–
(q
v1
+σq
t1
),从电动车辆102中选择第二电动车辆102-2,其中。如果没有电动车辆102合格,则计算机100不向操作员显示第一缓解策略作为可用的缓解策略。
50.计算机100可以选择第二位置108。例如,第二位置108可以是第一作业位置106-1,例如,在第一作业位置106-1在第二电动车辆102-2的存放位置130与分配给第二电动车辆102-2的作业位置106之间的情况。对于另一示例,第二位置108可以不包括在多个作业位置106中,如图3所示,在这种情况下,计算机100可以指示第一电动车辆102在行驶到第一作业位置106之前行驶到第二位置108。计算机100可以选择使第一电动车辆102-1和第二电动车辆102-2行驶的总距离最小化的第二位置108。
51.第二缓解策略是指示第一电动车辆102-1在行驶到第一作业位置106之前在第二位置108处充电。例如,如果第一电动车辆102-1的存放位置130配备有充电器,则第二位置108可以是该存放位置130。对于另一示例,第二位置108可以是公共充电设施(如果可用的话)。如果第一电动车辆102-1的存放位置130不具有充电器并且没有公共充电设施可用,则计算机100不将第二缓解策略显示为可用策略。
52.第三缓解策略是指示第一电动车辆102在第一作业位置106-1处再充电。例如,计算机100可以向第一作业位置106-1的操作员传输允许第一电动车辆102在第一作业位置
106-1处再充电的请求。如果计算机100作为响应从操作员接收到确认,则计算机100指示第一电动车辆102-1在第一作业位置106处再充电。如果第一作业位置106-1未被配备以对第一电动车辆102-1进行再充电,则计算机100不将第三缓解策略显示为可用策略。如果第一作业位置106-1的操作员拒绝许可,则计算机100输出剩余的可用缓解策略以供该组的操作员选择不同的缓解策略。
53.第四缓解策略是指示第一电动车辆102-1和第二电动车辆102-2交换相关联的电机104,即,将与第一电动车辆102-1相关联的电机104放置在第二电动车辆102-2中并且将与第二电动车辆102-2相关联的电机104放置在第一电动车辆102-1中。计算机100可以将第一电动车辆102-1重新分配到第二电动车辆102-2已经被分配到的作业位置106,并且将第二电动车辆102-2重新分配到第一作业位置106-1。可以从电动车辆102中选择第二电动车辆102,使得第一电动车辆102-1和第二电动车辆102-2具有用于新分配的作业位置106的足够电量。如果没有电动车辆102具有用于第一作业位置106-1的足够电量,或者如果第一电动车辆102-1没有足够的电量行驶到任何其他作业位置106,则计算机100不显示第四缓解策略作为可用策略。
54.在计算机100已经进行分配,并且已经选择了任何缓解策略之后,计算机100指示电动车辆102行驶到相应的分配的作业位置106。计算机100指示电动车辆102经由充电端口124(例如,通过将充电端口124电连接到车辆电池128)对相应的电机104充电。计算机100可以指示电动车辆102在到达作业位置106之后对电机104充电,使得电机104在行驶时具有较低的电量。使电机104在不使用时保持较低电量可以延长电机电池116的寿命,并且在电动车辆102发生碰撞的情况下是有帮助的。在作业位置106处,工人可以使用电机104来执行任务。在执行任务之后,电动车辆102可以从作业位置106行驶回到存放位置130。
55.在电机104已经用于执行任务之后,计算机100可以指示电动车辆102将电机104置于相应的预定电量水平。预定电量水平存储在计算机100中。计算机100可以存储每种类型的电机104的预定电量水平。可以选择预定的电量水平以最大化电机电池116的寿命或最小化在行驶期间损坏电机电池116的风险。因此,预定电量水平可以低于充满电,例如,低于半充电。
56.例如,在已经执行任务之后(例如,在离开作业位置106并到达存放位置130之后),如果电机电池116的电量低于预定电量水平,计算机100可以指示电动车辆102将电机104再充电到相应的预定电量水平。对于另一示例,响应于在相应作业位置106处执行相应任务之后电机104中的一个被充电到高于相应预定电量水平,计算机100可以指示相应电动车辆102从该电机104再充电,即,将电量从电机电池116汲取到车辆电池128,直到该电机104达到相应的预定电量水平,然后停止对该电机104再充电。从电机104对电动车辆102再充电可以在执行任务之后并且在离开作业位置106之前发生。
57.在相应的作业位置106处执行任务之后,计算机100可以指示电动车辆102从电动车辆102接收指示电动车辆102和电机104的实际能量消耗的数据并输出所述数据。出于本公开的目的,“实际能量消耗”被定义为用于执行动作的能量的测得量。动作可以是例如行驶到作业位置106、执行任务等。例如,计算机100可以指示用户界面110显示例如每个电动车辆102和每个电机104的数据。
58.可以将实际能量消耗与相应的预期能量消耗进行比较。例如,响应于第一电动车
辆102-1和与第一电动车辆102-1相关联的电机104的实际能量消耗之和超过第一电动车辆102-1和与第一电动车辆102-1相关联的电机104的预期能量消耗之和达至少阈值,即q
行驶
+σq
任务
–
(e
行驶
+σe
任务
)≥t,其中q
行驶
是第一电动车辆102-1从存放位置130行驶到作业位置106的实际能量消耗,q
任务
是执行任务中的一者的实际能量消耗,并且t是阈值,计算机100可以执行补救动作。计算机100可以存储与不同补救动作相对应的多个阈值,例如,第一阈值t1与第一补救动作相对应,第二阈值t2与第二补救动作相对应,并且第三阈值t3与第三补救动作相对应。可以选择阈值以指示不同确定度的异常能量消耗。第三阈值t3可以大于第二阈值t2,并且第二阈值t2可以大于第一阈值t1,即,t3》t2》t1,这意味着第三阈值t3指示最高确定度。
59.当实际能量消耗与预期能量消耗之间的差值超过阈值中的一者时,计算机100执行对应的补救动作。例如,第一补救动作可以是例如经由用户界面110输出消息。所述消息可以指示具有过量能量消耗的电动车辆102的标识以及实际能量消耗超过预期能量消耗的量。对于另一示例,第二补救动作可以是指示具有过量能量消耗的电动车辆102传输来自该电动车辆102的相机126的数据,例如,在能量消耗期间记录并示出包括充电端口124的该电动车辆102的一部分。然后,操作员可以评估工人如何使用电机104。对于另一示例,第三补救动作可以是指示具有过量能量消耗的电动车辆102禁用该电动车辆102的充电端口124,即,将充电端口124与车辆电池128断开连接,从而防止电机104或连接到充电端口124的任何其他部件的进一步能量消耗。
60.图4是示出用于管理该组电动车辆102的能量消耗的示例性过程400的过程流程图。计算机100的存储器存储用于执行过程400的步骤的可执行指令和/或可以诸如上述的结构来实现编程。如过程400的总体概述,计算机100接收指示电动车辆102和电机104的电量的数据和要在作业位置106处执行的任务,确定任务的预期能量消耗,和将电动车辆102分配到作业位置106。对于每个电动车辆102,计算机100确定该电动车辆102和与该电动车辆102相关联的电机104的电量之和是否小于该电动车辆102行驶到相应的作业位置106和与该电动车辆102相关联的电机104的预期能量消耗之和,并且如果是,则接收对缓解策略的选择。计算机100根据分配和选定的缓解策略来指示每个电动车辆102。在已经执行任务之后,计算机100接收实际能量消耗。如果电动车辆102中的一者和与该电动车辆102相关联的电机104的实际能量消耗之和超过该电动车辆102和与该电动车辆102相关联的电机104的预期能量消耗之和达阈值中的至少一个,则计算机100指示电动车辆102执行与超过的阈值相对应的补救动作。
61.过程400在框405中开始,其中计算机100接收指示电动车辆102和电机104的电量的数据以及具有其对应的作业位置106的任务。
62.接下来,在框410中,计算机100确定任务的预期能量消耗,如上所述。
63.接下来,在框415中,计算机100将电动车辆102分配到作业位置106,如上所述。
64.接下来,在框420至440中,计算机100迭代通过电动车辆102。在框420中,计算机100从电动车辆102中以预设顺序选择下一电动车辆102作为框425至440的当前电动车辆102。
65.接下来,在判定框425中,计算机100确定当前电动车辆102和与当前电动车辆102相关联的电机104的电量之和是否小于当前电动车辆102行驶到相应的作业位置106和与当
前电动车辆102相关联的电机104的预期能量消耗之和。如果是,则过程400前进到框430。如果不是,则过程400前进到框435。
66.在框430中,计算机100指示用户界面110输出可用的缓解策略并经由用户界面110从操作员接收选择,如上所述。在框430之后,过程400前进到框435。
67.在框435中,计算机100指示当前电动车辆102行驶到分配的作业位置106,经由当前电动车辆102的充电端口124对相应的电机104充电,并且如果适用,则遵循选定的缓解策略,如上所述。
68.接下来,在判定框440中,计算机100确定当前电动车辆102是否是预设顺序中的最后一个电动车辆102。如果是,则过程400前进到框445。如果否,则过程400返回到框420以按预设顺序迭代到下一电动车辆102。
69.在框445中,在作业位置106处执行任务之后,计算机100从电动车辆102接收实际能量消耗,如上所述。
70.接下来,在判定框450中,对于电动车辆102中的至少一个,计算机100确定该电动车辆102和与该电动车辆102相关联的电机104的实际能量消耗之和是否超过该电动车辆102和与该电动车辆102相关联的电机104的预期能量消耗之和达阈值中的至少一个。如果是,则过程400前进到框455。如果否,则过程400结束。
71.在框455中,计算机100根据超过阈值中的哪个阈值来针对具有过量能量消耗的电动车辆102执行补救动作,如上所述。在框455之后,过程400结束。
72.一般来讲,所描述的计算系统和/或装置可采用多种计算机操作系统中的任一种,包括但决不限于以下版本和/或种类:ford 应用;applink/smart device link中间件;microsoft 操作系统;microsoft 操作系统;unix操作系统(例如,由加利福尼亚州红杉海岸的oracle公司发布的操作系统);由纽约州阿蒙克市的international business machines公司发布的aix unix操作系统;linux操作系统;由加利福尼亚州库比蒂诺市的苹果公司发布的mac osx和ios操作系统;由加拿大滑铁卢的黑莓有限公司发布的黑莓操作系统;以及由谷歌公司和开放手机联盟开发的安卓操作系统;或由qnx软件系统公司提供的car信息娱乐平台。计算装置的示例包括但不限于车载计算机、计算机工作站、服务器、台式机、笔记本、膝上型计算机或手持计算机、或某一其他计算系统和/或装置。
73.计算装置通常包括计算机可执行指令,其中所述指令可由诸如以上列出的那些的一个或多个计算装置执行。可从使用多种编程语言和/或技术创建的计算机程序编译或解译计算机可执行指令,所述编程语言和/或技术单独地或者组合地包括但不限于java
tm
、c、c++、matlab、simulink、stateflow、visual basic、java script、python、perl、html等。这些应用程序中的一些可在诸如java虚拟机、dalvik虚拟机等虚拟机上编译和执行。一般来说,处理器(例如,微处理器)例如从存储器、计算机可读介质等接收指令,并且执行这些指令,由此执行一个或多个过程,包括本文所描述的过程中的一者或多者。此类指令和其他数据可使用各种计算机可读介质来存储和传输。计算装置中的文件通常是存储在诸如存储介质、随机存取存储器等计算机可读介质上的数据的集合。
74.计算机可读介质(也称为处理器可读介质)包括参与提供可由计算机(例如,由计
算机的处理器)读取的数据(例如,指令)的任何非暂时性(例如,有形)介质。此类介质可采用许多形式,包括但不限于非易失性介质和易失性介质。指令可由一种或多种传输介质传输,所述传输介质包括光纤、电线、无线通信,包括内部构件,所述内部构件包括耦合到计算机处理器的系统总线。常见形式的计算机可读介质包括例如ram、prom、eprom、flash-eeprom、任何其他存储器芯片或盒式磁带、或计算机可从中读取的任何其他介质。
75.本文所述的数据库、数据存储库或其他数据存储可包括用于存储、存取/访问和检索各种数据的各种机制,包括分层数据库、文件系统中的文件集、专用格式的应用程序数据库、关系型数据库管理系统(rdbms)、非关系数据库(nosql)、图形数据库(gdb)等。每个这样的数据存储通常被包括在采用诸如以上提及中的一种的计算机操作系统的计算装置内,并且以各种方式中的任何一种或多种来经由网络进行访问。文件系统可从计算机操作系统访问,并且可包括以各种格式存储的文件。除了用于创建、存储、编辑和执行已存储的程序的语言(例如上述pl/sql语言)之外,rdbms还通常采用结构化查询语言(sql)。
76.在一些示例中,系统元件可被实现为一个或多个计算装置(例如,服务器、个人计算机等)上、存储在与其相关联的计算机可读介质(例如,磁盘、存储器等)上的计算机可读指令(例如,软件)。计算机程序产品可包括存储在计算机可读介质上的用于实施本文描述的功能的此类指令。
77.在附图中,相同的附图标记指示相同的元件。另外,可改变这些元素中的一些或全部。关于本文描述的介质、过程、系统、方法、启发等,应当理解,虽然此类过程等的步骤已被描述为按照某一有序的顺序发生,但是可以通过以与本文所述顺序不同的顺序执行所述步骤来实践此类过程。还应理解,可同时执行某些步骤,可添加其他步骤,或者可省略本文所述的某些步骤。
78.除非本文作出相反的明确指示,否则权利要求中使用的所有术语意图给出如本领域技术人员所理解的普通和通常的含义。特定地,除非权利要求叙述相反的明确限制,否则使用诸如“一个”、“该”、“所述”等单数冠词应被解读为叙述所指示的元件中的一个或多个。“响应于”和“在确定
……
时”的使用指示因果关系,而不仅是时间关系。形容词“第一”、“第二”等贯穿本文档用作标识符,并且不意图表示重要性、顺序或数量。
79.已经以说明性方式描述了本公开,并且应理解,已经使用的术语意图是描述性的词语的性质,而不是限制性的。鉴于以上教导,本公开的许多修改和变化是可能的,并且本公开可以不同于具体描述的其他方式来实践。
80.根据本发明,提供了一种计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以:接收指示多个电动车辆和多个电机的电量的数据,所述电动车辆包括第一电动车辆和第二电动车辆,所述电机与相应的电动车辆相关联;接收要在多个位置处执行的多个任务,所述位置包括第一位置;基于所述电动车辆和电机的所述电量以及所述电动车辆行驶到所述位置和所述电机在所述位置处执行所述任务的预期能量消耗来将所述电动车辆分配给所述位置,所述第一电动车辆被分配给所述第一位置;以及响应于所述第一电动车辆和与所述第一电动车辆相关联的所述电机的所述电量之和小于所述第一电动车辆行驶到所述第一位置和与所述第一电动车辆相关联的所述电机在所述第一位置处执行所述任务的所述预期能量消耗之和,指示所述第二电动车辆行驶到所述第一电动车辆将位于的第二位置。
81.根据一个实施例,所述第二位置是所述第一位置。
82.根据一个实施例,所述第二位置不包括在所述多个位置中,并且所述指令还包括用于指示所述第一电动车辆在行驶到所述第一位置之前行驶到所述第二位置的指令。
83.根据一个实施例,所述指令还包括用于指示所述电动车辆在离开所述位置之后将所述电机再充电到相应的预定电量水平的指令。
84.根据一个实施例,所述预定电量水平低于充满电。
85.根据一个实施例,所述指令还包括用于以下操作的指令:响应于在所述相应位置处执行所述相应任务之后所述电机中的一个被充电到高于所述相应预定电量水平,指示所述相应电动车辆从所述电机再充电直到所述电机达到所述相应的预定电量水平。
86.根据一个实施例,所述预定电量水平低于半充电。
87.根据一个实施例,所述电动车辆包括第三电动车辆,所述多个位置包括所述第三电动车辆被分配到的第三位置,并且所述指令还包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述电量之和小于所述第三电动车辆行驶到所述第三位置和与所述第三电动车辆相关联的所述电机在所述第三位置处执行所述任务的所述预期能量消耗之和,指示所述第三电动车辆在行驶到所述第三位置之前在第四位置处充电。
88.根据一个实施例,所述多个位置是作业位置,所述电动车辆在行驶到所述作业位置之前位于包括所述第四位置的多个存放位置处,并且所述存放位置彼此分开。
89.根据一个实施例,所述电动车辆包括第三电动车辆,所述多个位置包括所述第三电动车辆被分配到的第三位置,并且所述指令还包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述电量之和小于所述第三电动车辆行驶到所述第三位置和与所述第三电动车辆相关联的所述电机在所述第三位置处执行所述任务的所述预期能量消耗之和,指示所述第三电动车辆在所述第三位置处再充电。
90.根据一个实施例,所述多个位置是作业位置,所述电动车辆在行驶到所述作业位置之前位于多个存放位置处,并且所述存放位置不与所述作业位置重叠。
91.根据一个实施例,所述指令还包括用于以下操作的指令:在所述位置处执行所述任务之后,指示所述电动车辆输出指示所述电动车辆和所述电机的实际能量消耗的数据。
92.根据一个实施例,所述电动车辆包括第三电动车辆,并且所述指令还包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述实际能量消耗之和超过所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述预期能量消耗之和达至少阈值,输出消息。
93.根据一个实施例,所述电动车辆包括第三电动车辆,并且所述指令还包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述实际能量消耗之和超过所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述预期能量消耗之和达至少阈值,指示所述第三电动车辆传输来自所述第三电动车辆的相机的数据。
94.根据一个实施例,所述电动车辆包括第三电动车辆,并且所述指令还包括用于以下操作的指令:响应于所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所述实际能量消耗之和超过所述第三电动车辆和与所述第三电动车辆相关联的所述电机的所
述预期能量消耗之和达至少阈值,指示所述第三电动车辆禁用所述第三电动车辆的充电端口。
95.根据一个实施例,所述多个位置彼此分开。
96.根据一个实施例,所述任务包括多种类型的所述任务,并且执行不同类型的任务的所述电机的所述预期能量消耗不同。
97.根据一个实施例,所述电机包括与相应类型的所述任务相关联的多种类型的所述电机。
98.根据一个实施例,所述指令还包括用于指示所述电动车辆经由所述电动车辆的充电端口对所述相应电机充电的指令。
99.根据本发明,一种方法包括:接收指示多个电动车辆和多个电机的电量的数据,所述电动车辆包括第一电动车辆和第二电动车辆,所述电机与相应的电动车辆相关联;接收要在多个位置处执行的多个任务,所述位置包括第一位置;基于所述电动车辆和电机的所述电量以及所述电动车辆行驶到所述位置和所述电机在所述位置处执行所述任务的预期能量消耗来将所述电动车辆分配给所述位置,所述第一电动车辆被分配给所述第一位置;以及响应于所述第一电动车辆和与所述第一电动车辆相关联的所述电机的所述电量之和小于所述第一电动车辆行驶到所述第一位置和与所述第一电动车辆相关联的所述电机在所述第一位置处执行所述任务的所述预期能量消耗之和,指示所述第二电动车辆行驶到所述第一电动车辆将位于的第二位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1