机器人作业位姿的可达性检测方法、装置、设备以及介质与流程
本申请涉及机器人,特别是涉及一种机器人作业位姿的可达性检测方法、装置、计算机设备和存储介质。
背景技术:
1、目前,为了确定机器人某个作业位姿的可达性,需要求解机器人逆运动学。这种确定作业位姿可达性的方式,求解过程耗时。同时,求解过程依赖于具体机器人的构型,不同机器人的求解过程不一样,缺乏通用性。另外,对于某些任务,位姿约束是一个范围,传统基于逆解的求解方法需要遍历区域内每个位姿,计算量大,不灵活。
技术实现思路
1、基于此,本申请的目的在于,提供一种机器人作业位姿的可达性检测方法、装置、计算机设备和存储介质,其可提高机器人作业位姿可达性检测的效率,并且对于范围约束的作业情况,能够快速返回满足任务约束,同时可达性最优的作业位姿。
2、根据本申请实施例的第一方面,提供一种机器人作业位姿的可达性检测方法,包括如下步骤:
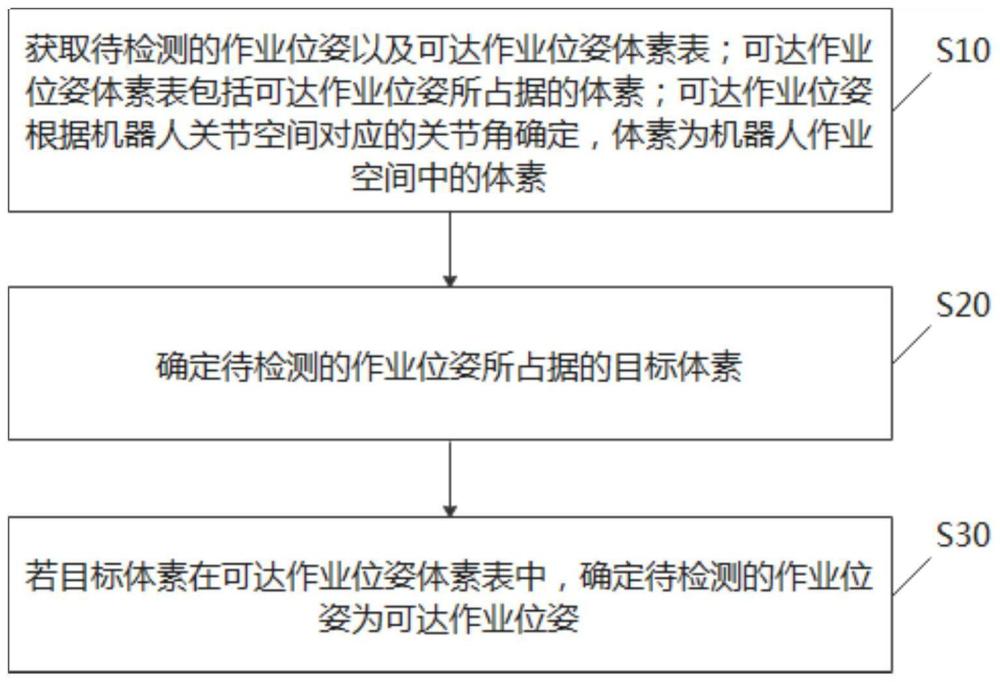
3、获取待检测的作业位姿以及可达作业位姿体素表;所述可达作业位姿体素表包括可达作业位姿所占据的体素;所述可达作业位姿根据机器人关节空间对应的关节角确定,所述体素为机器人作业空间中的体素;
4、确定待检测的所述作业位姿所占据的目标体素;
5、若所述目标体素在所述可达作业位姿体素表中,确定待检测的所述作业位姿为可达作业位姿。
6、根据本申请实施例的第二方面,提供一种机器人作业位姿的可达性检测装置,包括:
7、作业位姿获取模块,用于获取待检测的作业位姿以及可达作业位姿体素表;所述可达作业位姿体素表包括可达作业位姿所占据的体素;所述可达作业位姿根据机器人关节空间对应的关节角确定,所述体素为机器人作业空间中的体素;
8、目标体素确定模块,用于确定待检测的所述作业位姿所占据的目标体素;
9、位姿可达判断模块,用于若所述目标体素在所述可达作业位姿体素表中,确定待检测的所述作业位姿为可达作业位姿。
10、根据本申请实施例的第三方面,提供一种计算机设备,包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序适于由所述处理器加载并执行如上述任意一项所述的机器人作业位姿的可达性检测方法。
11、根据本申请实施例的第四方面,提供一种计算机可读存储介质,其上储存有计算机程序,该计算机程序被处理器执行时实现如上述任意一项所述的机器人作业位姿的可达性检测方法。
12、本申请实施例通过获取待检测的作业位姿以及可达作业位姿体素表;所述可达作业位姿体素表包括可达作业位姿所占据的体素;所述可达作业位姿根据机器人关节空间对应的关节角确定,所述体素为机器人作业空间中的体素;确定待检测的所述作业位姿所占据的目标体素;若所述目标体素在所述可达作业位姿体素表中,确定待检测的所述作业位姿为可达作业位姿。本申请实施例通过查询可达作业位姿体素表,判断待检测的所述作业位姿是否为可达作业位姿,无需进行机器人逆运动学求解,提高了机器人作业位姿可达性检测的效率。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
14、为了更好地理解和实施,下面结合附图详细说明本发明。
技术特征:
1.一种机器人作业位姿的可达性检测方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的机器人作业位姿的可达性检测方法,其特征在于:
3.根据权利要求2所述的机器人作业位姿的可达性检测方法,其特征在于:
4.根据权利要求1所述的机器人作业位姿的可达性检测方法,其特征在于:
5.根据权利要求4所述的机器人作业位姿的可达性检测方法,其特征在于:
6.根据权利要求4所述的机器人作业位姿的可达性检测方法,其特征在于:
7.根据权利要求6所述的机器人作业位姿的可达性检测方法,其特征在于:
8.一种机器人作业位姿的可达性检测装置,其特征在于,包括:
9.一种计算机设备,包括:处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任意一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任意一项所述方法的步骤。
技术总结
本申请涉及一种机器人作业位姿的可达性检测方法、装置、设备以及介质,该方法包括:获取待检测的作业位姿以及可达作业位姿体素表;可达作业位姿体素表包括可达作业位姿所占据的体素;可达作业位姿根据机器人关节空间对应的关节角确定,体素为机器人作业空间中的体素;确定待检测的作业位姿所占据的目标体素;若目标体素在可达作业位姿体素表中,确定待检测的作业位姿为可达作业位姿。本申请实施例提高了机器人作业位姿可达性检测的效率。进一步,本申请实施例通过对目标体素中所有可达作业位姿进行聚类、作业操作度排序、碰撞检测等操作,返回和待检测作业位姿最接近,可达性最优的位姿作为实际机器人执行的位姿。
技术研发人员:张会文
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!