基于BP神经网络的空间飞行器标准轨迹初始诸元计算方法
基于bp神经网络的空间飞行器标准轨迹初始诸元计算方法
技术领域
1.本发明涉及空间飞行器技术领域,尤其涉及基于bp神经网络的空间飞行器标准轨迹初始诸元计算方法。
背景技术:
2.诸元计算是根据发射条件和飞行器性能状态参数,预先计算出确保飞行器沿着预定标准轨迹飞向目标的参数,以此实现飞行器的飞行控制和精度控制。诸元计算是飞行器武器作战应用中的一项重要技术保障工作,诸元计算直接影响飞行器飞行控制稳定性和射击精确度,而诸元计算的正确性和时效性,直接关系飞行器武器发射的成败。
3.随着作战要求的提高,对飞行器快速发射要求越来越高,发射准备时间大幅度缩短,随之提出了缩短诸元计算时间的要求。
4.目前的诸元计算方法主要有射表拟合、基于自由段解析解和积分计算等。射表拟合法需要预先计算得到大量的数据作为拟合的基础,计算量大,且需制作复杂的数据表,需要通过多次轨迹迭代才能获取初始诸元,计算时间长。自由段解析解方法求解速度较快,但经过拟合后的多项式形式复杂,并且多项式近似计算后的精度受到限制。多年以来,积分计算方法仍然是诸元计算的主流方法。积分计算法首先通过计算发射点到落点的大地距离和大地方位角,以此初值粗略计算主动段关机时间,以粗略关机时间和大地方位角出发,通过多次轨迹迭代,才能得到精确的标准轨迹计算关机时间和瞄准方位角,积分计算法存在积分解算复杂,迭代求解速度慢的问题,越来越无法满足快速机动发射等新发射方式的需求。
5.王明海等在传统迭代方法的基础上提出了将落点射程偏差和方位角偏差的二元迭代分解成两个一元迭代的快速迭代方法,减少了轨迹迭代次数,但仍然需要轨迹迭代。雍恩米等建立了计算标准轨迹关机时间、发射方位角、关机方程以及导引方程系数的数学模型,并设计实现了基于该模型的飞行器发射诸元计算软件。但是,上述方法仍然无法彻底解决积分计算复杂、迭代在特定情况下会出现死循环以及无法量化瞄准方位角和关机时间之间强耦合关系的问题,无法实现快速计算初始诸元的目标。
技术实现要素:
6.针对上述存在的问题,本发明旨在提供一种基于bp神经网络的空间飞行器标准轨迹初始诸元计算方法,在保证计算精度的情况下,还能够极大地缩短诸元计算的时间。
7.为了实现上述目的,本发明所采用的技术方案如下:
8.基于bp神经网络的空间飞行器标准轨迹初始诸元计算方法,其特征在于,包括以下步骤,
9.s1:分析确定影响初始诸元计算的因素;
10.s2:基于影响初始诸元计算的因素,通过标准轨迹积分迭代方法生成瞄准方位角a
mz
和关机时间tk的初始样本;
11.s3:利用步骤s2中的初始样本建立基于bp神经网络的初始诸元计算模型;
12.s4:利用步骤s3中建立的初始诸元计算模型对空间飞行器标准轨迹的初始诸元进行计算。
13.进一步的,步骤s2的具体操作包括以下步骤,
14.s201:根据给定的发射点和目标点计算发射点和目标点之间的大地距离lm和大地方位角am;
15.s202:根据发射点和目标点之间的大地距离lm和大地方位角am预估关机时间和瞄准方位角的初值t
k0
、a
mz0
;
16.s203:将预估的关机时间和瞄准方位角的初值t
k0
、a
mz0
代入标准轨迹得到飞行器落点;
17.s204:计算发射点与飞行器落点之间的大地距离ld和大地方位角ad;
18.s205:根据发射点与落点之间的大地距离ld和大地方位角ad,通过迭代法求解初始诸元关机时间tk和瞄准方位角a
mz
。
19.进一步的,步骤s205的具体操作包括以下步骤,
20.s2051:将飞行器发射点和飞行器落点间的大地距离、大地方位角与瞄准方位角和关机时间之间的关系表达式
[0021][0022]
在关机时间和瞄准方位角的初值(t
k0
,a
mz0
)处展开,得到
[0023][0024]
式中,a()和l()为隐函数表达式,分别表示由关机时间和瞄准方位角计算大地方位角和大地距离;δl和δh分别为目标点与飞行器落点的大地距离和大地方位角差值;
[0025]
s2052:根据步骤s1051求解得到的δtk和δa
mz
进行迭代,则
[0026][0027]
式中,k和k+1表示迭代次数;
[0028]
s2053:将步骤s2052得到的关机时间tk(k+1)和瞄准方位角a
mz
(k+1)代入标准轨迹计算新的飞行器落点,重复步骤s204、s2051和s2052,直至新落点与目标点之间的大地距离和大地方位角差值δl、δh满足精度要求,得到初始诸元tk和a
mz
。
[0029]
进一步的,步骤s3中所述的初始诸元计算模型包括瞄准方位角神经网络模型和关机时间神经网络模型。
[0030]
进一步的,步骤s3中的瞄准方位角神经网络模型包括输入层,两个隐藏层和一个输出层,输入层的节点数为4,输入量分别为发射点纬度b0、发射点高程h0、发射点与落点之间的大地距离ld和大地方位角ad;两个隐藏层的节点数分别为19和18,且两个隐藏层的激活
函数均为sigmoid,输出层的激活函数为线性函数purline,输出量为瞄准方位角a
mz
,
[0031]
进一步的,步骤s3中的关机时间神经网络模型包括输入层,两个隐藏层和一个输出层,输入层的节点数为4,输入量分别为发射点纬度b0、发射点高程h0、发射点与落点之间的大地距离ld和大地方位角ad;两个隐藏层的节点数分别为15和14,且两个隐藏层均适用对数激活函数sigmoid,输出层的激活函数为线性函数purline,输出量为关机时间tk。
[0032]
进一步的,步骤s3的具体操作包括以下步骤,
[0033]
3201:对步骤s2中获取的初始样本进行归一化处理;
[0034]
s302:分别建立基于bp神经网络的瞄准方位角神经网络模型和关机时间神经网络模型;
[0035]
s303:对瞄准方位角神经网络模型和关机时间神经网络模型进行网络训练和测试。
[0036]
进一步的,步骤s301中归一化处理的具体方法为
[0037][0038]
式中,y为归一化后的输入样本数据,y
max
为归一化后的区间上限,y
min
为归一化后的区间下限,x为待归一化的输入样本数据,x
min
为输入样本数据的最小值,x
max
为输入样本数据的最大值。
[0039]
本发明的有益效果是:
[0040]
本发明中基于bp神经网络的空间飞行器标准轨迹初始诸元计算方法,首先通过标准轨迹积分迭代生成初始样本,然后通过有监督的学习算法分别建立了瞄准方位角神经网络模型和关机时间神经网络模型,其输入层均为发射点纬度b0、发射点高程h0、发射点与落点之间的大地距离ld和大地方位角ad,输出层分别对应为瞄准方位角a
mz
和关机时间tk,经仿真结果表明,用神经网络预测得到的飞行器落点纵向偏差小于10m,横向偏差小于20m,满足精度要求,同时,相比于传统积分方法,神经网络平均仅需使用0.014857s就可完成初始诸元的计算,计算时间缩短了2.9万倍,可以实现快速发射的目标。
附图说明
[0041]
图1为本发明中影响初始诸元计算的因素。
[0042]
图2为传统方法求解初始诸元流程图。
[0043]
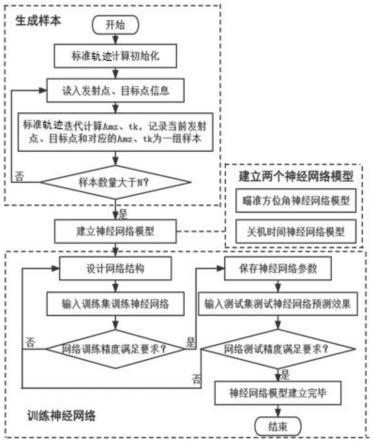
图3为本发明中初始诸元神经网络模型建立过程流程图。
[0044]
图4为本发明中瞄准方位角的神经网络结构。
[0045]
图5为本发明中关机时间的神经网络结构。
[0046]
图6为本发明中瞄准方位角的神经网络训练过程中误差的收敛曲线。
[0047]
图7为本发明中关机时间的神经网络误差收敛曲线。
[0048]
图8为本发明仿真实验中瞄准方位角的神经网络预测误差。
[0049]
图9为本发明仿真实验中关机时间的神经网络预测误差。
具体实施方式
[0050]
为了使本领域的普通技术人员能更好的理解本发明的技术方案,下面结合附图和
实施例对本发明的技术方案做进一步的描述。
[0051]
基于bp神经网络的空间飞行器标准轨迹初始诸元计算方法,包括以下步骤,
[0052]
s1:分析确定影响初始诸元计算的因素;
[0053]
具体的,标准轨迹的起算数据为发射点经度l0、发射点纬度b0、发射点高程h0、目标点经度lm、目标点纬度bm、目标点高程hm。飞行器实际飞行的受力分析中,与大地经度具有相关性的力较少,因地球的形状是旋转椭球体,经度几乎不对飞行器受力的大小产生影响,可以忽略经度对标准轨迹计算的影响,在卯酉方向上,地球半径的不均匀给飞行器飞行带来显著影响,影响飞行器初始诸元的计算。引力的大小与发射点的高程紧密相关,经过多次仿真分析,高程对初始诸元的计算有较大影响,假定目标点高程一致,仅考虑发射点高程h0对初始诸元计算的影响。
[0054]
(1)发射点纬度
[0055]
设发射点纬度的真值为测量偏差为δb0,则发射点纬度的测量值b0为
[0056][0057]
因此,标准轨迹以点作为发射点时,实际的发射点为式中,和分别为发射点经度和高程的真实值;
[0058]
则由纬度偏差引起的飞行器落点偏差为
[0059]
δlb=δl
b,j
(δb0)+δl
b,f
(δb0)
ꢀꢀꢀ
(2)
[0060]
式中,δlb为飞行器落点偏差,包含飞行器落点的横向偏差和纵向偏差;δl
b,j
为几何影响,δl
b,f
为动力学影响,由引力偏差和惯性力偏差引起;
[0061]
根据几何学知识可得
[0062][0063]
为地球的平均半径;
[0064]
飞行器的引力计算公式
[0065][0066][0067]
由公式(4)和(5)可得,当飞行器的实际发射点纬度与诸元计算纬度有偏差δb0时,地球引力产生相应的偏差δg;而飞行器的实时飞行速度和位置都与引力的大小相关,飞行器位置和速度的偏差量可以表示为
[0068][0069][0070]
式中,g
x
为引力加速度g在惯性坐标系x方向的投影,gy为引力加速度g在惯性坐标系y方向的投影;gz为引力加速度g在惯性坐标系z方向的投影,gr为引力加速度g在轨道半径的径向引力,x为飞行器实时位置在惯性系x轴的投影,y为飞行器实时位置在惯性系y轴的投影,z为飞行器实时位置在惯性系z轴的投影,r为飞行器实时位置与地心的距离,w为地球自转角速度,r
ox
为发射点地心失径在惯性系的x轴投影,r
oy
为发射点地心失径在惯性系的y轴投影,r
oz
为发射点地心失径在惯性系的z轴投影,gw为引力加速度g垂直于轨道半径的切向引力,w
x
为地球自转角速度在惯性系的x轴投影,wy为地球自转角速度在惯性系的y轴投影,wz为地球自转角速度在惯性系的z轴投影,a
mz
为瞄准方位角;为飞行器位置的偏差量,为飞行器速度的偏差量;
[0071]
由公式(6)可得,飞行器的射程和速度都是发射点纬度的函数,当纬度发生变化,实际轨迹的位置、速度相对标准轨迹产生偏差。
[0072]
δl
b,f
(δb0)受惯性力偏差影响,对于牵连惯性加速度有
[0073][0074][0075]
对于柯氏惯性加速度有
[0076][0077][0078]
式中,为牵连加速度在惯性坐标系x方向的投影,为牵连加速度在惯性坐标系y方向的投影,为牵连加速度在惯性坐标系z方向的投影;r
x
为飞行器实时地心失径在
惯性坐标系x方向的投影,ry为飞行器实时地心失径在惯性坐标系y方向的投影,rz为飞行器实时地心失径在惯性坐标系z方向的投影;为柯氏加速度在惯性坐标系x方向的投影,为柯氏加速度在惯性坐标系y方向的投影,为柯氏加速度在惯性坐标系z方向的投影;
[0079]
由公式(5)可知,w
x
,wy,wz为与纬度b0有关,由公式(7)和公式(8)可以推出牵连惯性力产生的加速度与纬度b0有关,由公式(9)和公式(10)可以推出柯氏惯性力产生的加速度与纬度b0有关。当纬度偏差δb0时,必然导致牵连加速度和柯氏加速度产生偏差量,影响飞行器落点精度。
[0080]
对于相同的射程和相同的射向,发射点纬度的变化引起的落点偏差显著。当大地方位角为0
°
时,大地纬度每变化1
°
,落点纵向偏差变化约为1m至3m,横向偏差变化约为15m至18m。
[0081]
(2)发射点高程
[0082]
发射点高程是发射点沿铅垂线方向到大地水准面的距离,通常用经纬仪三角高程测量得到。发射点高程偏差对飞行器主动段轨迹影响显著,主要对飞行器飞行主动段关机点x方向和y方向的位置和速度产生影响,并且这种影响是非线性的。
[0083]
发射点高程偏差δh0指飞行器发射点相对于实际海平面高度与测量的海平面高度之间的差;发射点高程引起的偏差δlh(δh0)可以分为由几何因素引起的偏差δl
h,j
(δh0)和由动力学引起的偏差δl
h,f
(δh0)。
[0084]
几何偏差的大小为
[0085][0086]
式中,为飞行器再入大气层的轨迹倾角,β为航程角;
[0087]
根据数学模型可得
[0088][0089][0090][0091]
从公式(4)、(12)、(13)和(14)中可得,引力的大小与发射点高程密切相关,当发射点高程偏差δh0,会产生引力偏差δg,引力偏差必然引起位置偏差,从而引起牵连加速度、气动力、发动机推力的偏差。受力的差异进一步加剧位置和速度的偏差,形成误差的发散性
传播,对轨迹落点精度产生较大影响。
[0092]
(3)大地距离与大地方位角
[0093]
空间飞行器轨迹计算包括大地基础诸元计算和射击诸元计算。大地基础诸元计算是根据发射点和目标点的地心大地坐标,采用贝塞尔大地问题反解公式或巴乌曼大地问题反解公式,求得发射点至目标点的大地距离和大地方位角,为射击诸元计算提供起算基准数据。大地基础诸元计算是整个诸元计算的基础,对飞行器落点精度影响较大。
[0094]
给定发射点条件下的标准轨迹,其落点是瞄准方位角和关机时间的函数。飞行器的发射点和落点间的大地方位角ad和大地距离ld也由瞄准方位角和关机时间共同决定,各诸元之间的关系如公式(15)所示。
[0095][0096]
综上,本发明中标准轨迹起算数据转换为:发射点纬度b0、发射点高程h0、发射点与目标点之间的大地距离ld和发射点与目标点之间的大地方位角ad,影响初始诸元计算的因素如附图1所示。
[0097]
进一步的,s2:基于影响初始诸元计算的因素,通过标准轨迹积分迭代方法生成瞄准方位角a
mz
和关机时间tk的初始样本;
[0098]
传统初始诸元计算方法是通过给定发射点、目标点信息,通过迭代计算进行求解。求解标准轨迹瞄准方位角和关机时间的流程如图2所示。具体的,
[0099]
s201:根据给定的发射点和目标点计算发射点和目标点之间的大地距离lm和大地方位角am;
[0100]
s202:根据发射点和目标点之间的大地距离lm和大地方位角am预估关机时间和瞄准方位角的初值t
k0
、a
mz0
;
[0101]
s203:将预估的关机时间和瞄准方位角的初值t
k0
、a
mz0
代入标准轨迹得到飞行器落点;
[0102]
s204:计算发射点与飞行器落点之间的大地距离ld和大地方位角ad;
[0103]
s205:根据发射点与落点之间的大地距离ld和大地方位角ad,通过迭代法求解初始诸元关机时间tk和瞄准方位角a
mz
。
[0104]
将公式(15),在关机时间和瞄准方位角的初值(t
k0
,a
mz0
)处展开,得到
[0105][0106]
式中,a()和l()为隐函数表达式,分别表示由关机时间和瞄准方位角计算大地方位角和大地距离;δl和δh分别为目标点与飞行器落点的大地距离和大地方位角差值;
[0107]
根据求解得到的δtk和δa
mz
进行迭代,令
[0108][0109]
式中,k和k+1表示迭代次数;
[0110]
将得到的关机时间tk(k+1)和瞄准方位角a
m2
(k+1)代入标准轨迹计算新的飞行器落点,求出新的落点与目标点之间的δl和δh,当δl和δh满足精度要求时,得到初始诸元tk和a
mz
;否则按照上述方法重复迭代计算,直至δl和δh满足精度要求。
[0111]
进一步的,s3:利用步骤s2中的初始样本建立基于bp神经网络的初始诸元计算模型;
[0112]
瞄准方位角和关机时间作为标准轨迹计算的两个重要诸元,同时受到发射点纬度、发射点高程、大地方位角和大地距离的影响。经过实验分析,建立一个输入为发射点纬度、发射点高程、大地方位角和大地距离,输出为瞄准方位角和关机时间的神经网络模型,并行拟合四个输入与两个输出之间的非线性映射关系,神经网络训练的效果不理想。故本发明中建立两个结构不同的神经网络模型,分别对发射点纬度、发射点高程、大地方位角和大地距离与瞄准方位角之间的非线性映射关系和发射点纬度、发射点高程、大地方位角和大地距离与关机时间之间的非线性映射关系进行拟合,从而实现对瞄准方位角和关机时间的快速计算。两个神经网络模型分别为包括瞄准方位角神经网络模型和关机时间神经网络模型。初始诸元神经网络模型建立过程如附图3所示。
[0113]
具体的,瞄准方位角神经网络模型如附图4所示,包括输入层,两个隐藏层和一个输出层,输入层的节点数为4,输入量分别为发射点纬度b0、发射点高程h0、发射点与落点之间的大地距离ld和大地方位角ad;两个隐藏层的节点数分别为19和18,且两个隐藏层的激活函数均为sigmoid,输出层的激活函数为线性函数purline,输出量为瞄准方位角a
mz
,
[0114]
关机时间神经网络模型如附图5所示,包括输入层,两个隐藏层和一个输出层,输入层的节点数为4,输入量分别为发射点纬度b0、发射点高程h0、发射点与落点之间的大地距离ld和大地方位角ad;两个隐藏层的节点数分别为15和14,且两个隐藏层均适用对数激活函数sigmoid,输出层的激活函数为线性函数purline,输出量为关机时间tk。
[0115]
更具体的,瞄准方位角神经网络模型和关机时间神经网络模型的建立过程包括以下步骤,
[0116]
3201:对步骤s2中获取的初始样本进行归一化处理;
[0117]
瞄准方位角a
mz
和关机时间tk的影响因素有发射点纬度b0、发射点高程h0、发射点与落点之间的大地距离ld和大地方位角ad,将这四个因素作为神经网络的输入参数。神经网络的输出参数分别为瞄准方位角a
mz
、关机时间tk。通过公式(17)积分迭代计算每种组合下的a
mz
和tk,构成46800组标准样本。本发明的样本生成条件是:b0范围为30
°
~35
°
,h0范围为300m~600m,ad范围为0
°
~360
°
,ld范围为200km~600km。在上述范围内网格化生成样本,样本可覆盖该范围内的所有情况。
[0118]
四个输入变量获取的样本数据在数量级之间存在很大差距,而bp神经网络对数据的变化非常敏感,如果输入数据在量级上差别过大,神经网络的权值也会受到大数量级的影响,不利于神经网络对非线性映射关系的学习。
[0119]
为了避免因样本数据在量级上的差距给神经网络带来的误差,需将四个输入数据
消除量纲,将其控制在相对接近的范围内,故对输入数据按照如下公式进行归一化。
[0120][0121]
式中,y为归一化后的输入样本数据,y
max
为归一化后的区间上限,y
min
为归一化后的区间下限,x为待归一化的输入样本数据,x
min
为输入样本数据的最小值,x
max
为输入样本数据的最大值。
[0122]
记录此归一化映射,将此映射用于对测试样本进行预测结果时的反归一化。将46800组标准样本打乱顺序,取其前37800组样本作为神经网络的训练数据,后9000组样本作为神经网络的测试数据。
[0123]
s302:分别建立基于bp神经网络的瞄准方位角神经网络模型和关机时间神经网络模型;
[0124]
根据上述瞄准方位角神经网络模型和关机时间神经网络模型结构分别建立瞄准方位角神经网络模型和关机时间神经网络模型。
[0125]
s303:对瞄准方位角神经网络模型和关机时间神经网络模型进行网络训练和测试。
[0126]
将46800组标准样本打乱顺序,取其中的前37800组样本作为两个bp神经网络的训练数据,分别对两个bp神经网络进行训练,得到神经网络的权值和阈值。
[0127]
上述两个bp网络采用相同的训练方式。神经网络训练次数最大值为10000,学习速率为0.01,网络目标误差为1
×
10-10
,训练方法为levenberg-marquardt(l-m)算法,损失函数为均方误差(mean squared error,mse)。l-m算法适用于中小型规模的神经网络,具有收敛速度快的优点。两个神经网络的训练过程如附图6和附图7所示。
[0128]
进一步的,s4:利用步骤s3中建立的初始诸元计算模型对轨迹飞行器标准轨迹的初始诸元进行计算。
[0129]
将发射点纬度b0、发射点高程h0、发射点与落点之间的大地距离ld和大地方位角ad数据输入到步骤s3中已训练好的神经网络中,即可对初始诸元瞄准方位角a
mz
和关机时间tk进行快速的自动计算。
[0130]
仿真实验:
[0131]
为了检验所训练bp神经网络的有效性,将未参与训练网络的后9000组样本数据用于神经网络对初始诸元计算效果的验证。将神经网络计算结果和传统标准轨迹积分迭代计算结果进行对比。仿真结果如附图8和9所示。
[0132]
由附图8可得,通过神经网络计算的瞄准方位角与通过标准轨迹迭代计算得到的瞄准方位角相比,最大误差值的绝对值小于0.0095rad,误差值的均方差为2.8752
×
10-5
rad。由附图9可以得到,通过神经网络计算的关机时间与标准轨迹迭代计算的关机时间相比,最大误差值的绝对值小于0.005217s,误差值的均方差为7.3619
×
10-5
s,瞄准方位角和关机时间的预测误差情况如下表1所示。
[0133]
表1瞄准方位角和关机时间的预测误差
[0134][0135]
以落点的纵横向偏差为评价标准,验证神经网络对关机时间和瞄准方位角的预测效果。将神经网络预测的瞄准方位角和关机时间代入标准轨迹迭代积分,计算得到飞行器落点的横向偏差δh∈(14,20)m,纵向偏差δl∈(2,10)m,说明神经网络模型对初始诸元的计算效果较好。
[0136]
本实验环境为windows7操作系统,内存空间为12gb,处理器为intel(r)xeon(r)cpu e5-1603 0@2.80ghz。
[0137]
采用queryperformancefrequency函数和queryperformancecounter函数统计初始诸元计算时间,该函数可以返回硬件支持的高精度计数器的频率。在标准轨迹初始化时,先调用queryperformancefrequency函数获得计算机内部计时器的时钟频率,在初始诸元计算前和计算后分别调用queryperformancecounter函数,利用两次获得的计数之差和时钟频率,可以计算出初始诸元计算经历的精确时间。
[0138]
采用传统迭代积分方法计算初始诸元和采用神经网络模型计算初始诸元平均耗时情况见表2。
[0139]
表2两种方法平均耗时对比
[0140][0141]
由表2可知,本发明提出的神经网络模型极大地提高了标准轨迹初始诸元计算效率。
[0142]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1