城市生态修复优先顺序识别方法、装置及电子设备
1.本发明涉及生态修复技术领域,尤其涉及一种城市生态修复优先顺序识别方法、装置及电子设备。
背景技术:
2.生态修复被视为有效缓解城市化对生态系统负面影响的一种重要途径。在城市地区开展生态修复,需要通过空间分析技术确定优先区域,建立规划布局措施确保生态修复的目标空间,准确划分生态修复区、建立生态修复的重要性评估和确立恢复的优先级别。
3.目前,生态修复主要应用于自然景观、栖息地和自然保护区等关键生态用地区,对城市生态修复区的划分往往是利用单一年份的统计资料划分出生态修复区,或者是针对固定研究范围划分出统一的生态修复区。因此,忽视了城市发展过程对生态系统服务的潜在影响,也忽视了城市内部由于社会发展及自然本底状况对生态系统服务的空间异质性的影响。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种城市生态修复优先顺序识别方法、装置及电子设备。
5.第一方面,本发明提供一种城市生态修复优先顺序识别方法,包括:
6.获取目标城市区域内多个生态系统服务指标在不同年份的空间分布数据并进行标准化处理;
7.根据标准化处理后的所述多个生态系统服务指标在不同年份的空间分布数据,确定所述目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇值esb;
8.根据所述每个像元在不同年份的esb,以及所述每个像元在不同年份的不透水表面指数值isa,确定生态修复目标年份时段;
9.针对所述每个像元中的任一目标像元,根据所述目标像元在所述生态修复目标年份时段的isa变化率,以及所述目标像元的邻域像元在所述生态修复目标年份时段的esb变化率,确定所述目标像元的生态修复优先顺序。
10.可选地,所述多个生态系统服务指标包括:生境质量、碳储量、土壤保持量、产水量、粮食供应量、水果供应量以及公园服务能力。
11.可选地,所述根据所述每个像元在不同年份的esb,以及所述每个像元在不同年份的不透水表面指数值isa,确定生态修复目标年份时段,包括:
12.根据所述每个像元在不同年份的esb和isa,建立一元线性回归模型确定不同年份对应的esb相对于isa变化的斜率值;
13.根据所述斜率值中的最大值和次大值所分别对应的年份,确定生态修复目标年份时段。
14.可选地,所述根据所述目标像元在所述生态修复目标年份时段的isa变化率,以及所述目标像元的邻域像元在所述生态修复目标年份时段的esb变化率,确定所述目标像元的生态修复优先顺序,包括:
15.根据所述目标像元在所述生态修复目标年份时段的isa变化率,以及所述目标像元的邻域像元在所述生态修复目标年份时段的esb变化率,确定所述目标像元对应的双变量莫兰指数,所述双变量莫兰指数用于表征esb与isa之间的空间相关性;
16.根据所述目标像元对应的双变量莫兰指数和显著性检验结果,确定所述目标像元的生态修复优先顺序。
17.可选地,所述根据所述目标像元对应的双变量莫兰指数和显著性检验结果,确定所述目标像元的生态修复优先顺序,包括:
18.根据所述目标像元对应的双变量莫兰指数和显著性检验结果,确定所述目标像元对应的空间集聚区类型;
19.根据所述空间集聚区类型,确定所述目标像元的生态修复优先顺序;
20.其中,所述空间集聚区类型包括以下五种:
21.高-高集聚区,所述高-高集聚区用于表示城市化强度高同时对周边的生态系统服务损失也高的集聚区;
22.高-低集聚区,所述高-低集聚区用于表示城市化强度高,但是对周边生态系统服务损失相对较小的集聚区;
23.低-高集聚区,所述低-高集聚区用于表示城市化强度变化较小,但是对周边的生态系统服务损失相对较高的集聚区;
24.低-低集聚区,所述低-低集聚区用于表示城市化强度变化较小,对周边的生态系统服务损失也相对较小的集聚区;
25.不显著影响区,所述不显著影响区用于表示城市化强度和生态系统服务两者的变化关系趋于平衡,生态系统服务较好,或者城市化后期生态系统修复已有较好效果,或者城市化影响程度低的集聚区。
26.可选地,所述方法还包括:
27.根据标准化处理后的所述多个生态系统服务指标在不同年份的空间分布数据,进行预设网格尺度的生态系统服务指标聚类分析,确定所述目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇类型。
28.第二方面,本发明还提供一种城市生态修复优先顺序识别装置,包括:
29.标准化处理模块,用于获取目标城市区域内多个生态系统服务指标在不同年份的空间分布数据并进行标准化处理;
30.第一确定模块,用于根据标准化处理后的所述多个生态系统服务指标在不同年份的空间分布数据,确定所述目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇值esb;
31.第二确定模块,用于根据所述每个像元在不同年份的esb,以及所述每个像元在不同年份的不透水表面指数值isa,确定生态修复目标年份时段;
32.第三确定模块,用于针对所述每个像元中的任一目标像元,根据所述目标像元在所述生态修复目标年份时段的isa变化率,以及所述目标像元的邻域像元在所述生态修复
目标年份时段的esb变化率,确定所述目标像元的生态修复优先顺序。
33.第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述第一方面所述的城市生态修复优先顺序识别方法。
34.第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上所述第一方面所述的城市生态修复优先顺序识别方法。
35.第五方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述城市生态修复优先顺序识别方法。
36.本发明提供的城市生态修复优先顺序识别方法、装置及电子设备,通过获取目标城市区域内多个生态系统服务指标在不同年份的空间分布数据并标准化处理,确定出目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇值esb和不透水表面指数值isa,能够确定出生态修复目标年份时段,然后,根据生态修复目标年份时段的任一目标像元的isa变化率和目标像元的领域像元在该时段的esb变化率,从而确定出该目标像元的生态修复优先顺序。进而,能够划分出城市生态修复区的优先区域,提高城市区域生态修复的高效性与经济性。
附图说明
37.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
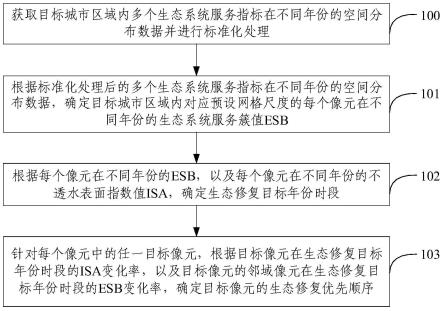
38.图1为本发明提供的一种城市生态修复优先顺序识别方法的流程示意图;
39.图2为本发明提供的一种城市生态修复优先区划分的流程示意图;
40.图3为本发明提供的城市生态修复优先顺序识别装置的结构示意图;
41.图4为本发明提供的电子设备的结构示意图。
具体实施方式
42.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.为了便于更加清晰地理解本发明的技术方案,首先对本发明相关的一些技术内容进行介绍。
44.生态修复被视为有效缓解城市化对生态系统负面影响的一种重要途径。在城市生态系统管理中,面向城市生态系统服务能力的提升的生态修复尚未完全纳入国土空间生态修复体系,难以在国土空间规划中有效地实施。在城市地区开展生态修复需要系统协调城市化水平、生态修复需求和生态系统服务的提升规划布局。
45.因此,通过空间分析技术确定优先区域,建立规划布局措施确保生态修复的目标
空间,准确划分生态修复区、建立生态修复的重要性评估和确立恢复的优先级别,是当前城市生态规划与管理面临的关键技术问题。
46.景观优化是当前确定生态修复优先区的一类重要技术方法。其依据景观生态学理论,基于对景观格局与生态过程互馈关系,对景观要素进行空间上的调整与组合,以实现最大的生态效益与区域可持续发展。景观优化通过调整景观斑块中的组分和空间配置特征,以达到生物多样性保护、生态系统管理和景观可持续性的目标。将生态系统服务供给与城市居民对生态系统服务的需求耦合关联,面向生态系统的格局与功能互馈,开展景观优化,通过改善和调整景观结构与功能布局,恢复和重建生态景观,提升区域生态系统服务,为城市生态规划与国土空间生态修复布局提供技术支撑,是景观优化的一项重要目标。
47.以往,生态修复技术主要应用于自然景观、栖息地和自然保护区等关键生态用地区。在高强度城市化地区,存在复杂的人类与自然互动,修复的需求、频率和效果远远大于这些关键生态用地,但是修复布局和修复措施落实空间却相对困难,究其原因就是存在较大的用地矛盾,生态用地的价值往往被忽视。城市化在改变景观格局,也改变了生态系统服务。随着生态系统服务供应的减少和需求的增加,城市地区的社会经济发展和人类活动通常高于其他自然空间,城市面临着多种生态系统服务供需不平衡的挑战。
48.因此,开发一种基于城市化效应与城市化发展水平耦合的生态修复布局技术,为国土空间生态修复规划充分利用生态系统的多功能属性和城市居民对生态系统服务的多种需求匹配,进而开展碎片化生态用地的重建、恢复和修复提供一种布局方案,有助于提升城市生态系统管理水平。
49.本发明提供的城市生态修复优先顺序识别方法、装置及电子设备,通过获取目标城市区域内多个生态系统服务指标在不同年份的空间分布数据并标准化处理,确定出目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇值(ecosystem service bundles,esb)和不透水表面指数值(impervious surface area,isa),能够确定出生态修复目标年份时段,然后,根据生态修复目标年份时段的任一目标像元的isa变化率和目标像元的领域像元在该时段的esb变化率,从而确定出该目标像元的生态修复优先顺序。进而,能够划分出城市生态修复区的优先区域,提高城市区域生态修复的高效性与经济性。
50.图1为本发明提供的一种城市生态修复优先顺序识别方法的流程示意图。如图1所示,该方法包括:
51.步骤100、获取目标城市区域内多个生态系统服务指标在不同年份的空间分布数据并进行标准化处理。
52.具体地,首先确定多个生态系统服务指标,用于对目标城市区域的生态系统服务进行评估。确定生态系统服务指标后,获取目标城市区域内的这些多个生态系统服务指标在不同年份的空间分布数据。
53.可选地,多个生态系统服务指标可以包括:
54.(1)生境质量。
55.根据已有的土地利用类型数据,可以将目标城市区域的不同景观类型按照自然程度划分为自然景观(例如林地、草地、水域、滩涂和裸地等)、半自然景观(例如园地和耕地等)以及人工景观(例如城建用地等)三类。
56.不同景观类型的生境质量随着其自然程度降低而降低,并受城建用地、裸地、园地、耕地和道路等胁迫因子影响。
57.一种实施方式中,可以采用生态系统服务和权衡的综合评估模型(integrated valuation of ecosystem services and trade-offs,invest)模型中的生境质量(habitat quality)模块,模型评估结果为无量纲的生境质量指数,范围在0-1之间,值越高代表生境质量越好,从而得到不同年份的生境质量的空间分布数据。
58.(2)碳储量。
59.一种实施方式中,基于土地利用类型数据和/或土地覆被类型数据,以及碳密度的数据,可以利用invest模型中的碳储量(carbon)模块求地上植被碳储量、地下植被碳储量、死亡有机质碳储量、土壤碳储量,得到指定区域的总碳储量,从而得到不同年份的碳储量的空间分布数据。
60.(3)土壤保持量。
61.一种实施方式中,可以采用修正的通用土壤流失模型(the revised universal soil loss equation,rusle)模型模拟年平均土壤侵蚀量,并在土壤侵蚀量的基础上估算土壤保持量,从而得到不同年份的土壤保持量的空间分布数据。
62.(4)产水量。
63.一种实施方式中,可以利用invest模型中的产水量(water yield)模块在指定区域,根据水量平衡方程计算评估时段的产水量,从而得到不同年份的产水量的空间分布数据。
64.(5)粮食供应量。
65.一种实施方式中,根据已有的土地利用类型数据,可以得知耕地分布,从而计算出耕地面积,将每年统计的粮食总产量数据分配至每个区域,从而得到不同年份的粮食供应量的空间分布数据。
66.(6)水果供应量。
67.一种实施方式中,根据已有的土地利用类型数据,可以得知园地分布,从而计算出园地面积,将每年统计的水果总产量数据分配至每个区域,从而得到不同年份的水果供应量的空间分布数据。
68.(7)公园服务能力。
69.一种实施方式中,可以以城市所有公园中面积大于1公顷且对公众开放的公园的属性数据为基础,选取公园面积、公园类型、自然度和水体四个指标综合评估公园服务能力,并建立公园服务能力权重评价公式:
70.p=a1·
ar+a2·
ty+a3·
na+a4·
wb
71.其中,p是公园的服务能力;ar是公园面积指标;ty是公园类型指标;na是自然度指标;wb是水体指标;a1、a2、a3和a4为各因子权重,可以由熵权法确定。以公园类型为基础,可以建立基于15分钟步行和30分钟公交的公园辐射指数,将公园服务能力指数进行空间化,从而获得不同年份的公园服务能力的空间分布数据。
72.获取目标城市区域内的这些多个生态系统服务指标在不同年份的空间分布数据后,对这些多个生态系统服务指标的数据进行标准化处理。
73.一种实施方式中,标准化处理可以是标准差规范化处理,即利用下列公式:
[0074][0075][0076][0077]
其中xi是某一生态系统服务指标的数据的原始值,为这一生态系统服务指标的数据的均值,n为空间分布中的像元数量(一个像元对应这一生态系统服务指标的一个数据),s为所有像元对应的这一生态系统服务指标的数据的标准差,zi为这一生态系统服务指标的数据的标准化值。
[0078]
对生态系统服务指标的空间分布数据进行标准化处理,有利于分析生态系统服务的时空演变规律,使得多种生态系统服务类型之间具有可比性和操作性。
[0079]
步骤101、根据标准化处理后的多个生态系统服务指标在不同年份的空间分布数据,确定目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇值esb。
[0080]
具体地,得到多个生态系统服务指标在不同年份的空间分布数据的标准化值后,预先设定一个网格尺度,例如以1km作为网格尺度,划分像元,可以根据标准化值来确定目标城市区域内划分出的每个像元在不同年份的esb。
[0081]
一种实施方式中,由于一个像元对应着多个生态系统服务指标在不同年份的空间分布数据的标准化值,可以将各个生态系统服务指标的某一年份的空间分布数据的标准化值的均值作为该像元在这一年份的esb。
[0082]
步骤102、根据每个像元在不同年份的esb,以及每个像元在不同年份的不透水表面指数值isa,确定生态修复目标年份时段。
[0083]
具体地,可以用isa象征城市化强度和水平。
[0084]
一种实施方式中,可以采用陆地卫星主题成像仪(landsat thematic mapper,landsat tm)等中分辨率遥感影像为数据源,基于植被-不透水面-土壤(vegetation-impervious surface-soil,v-i-s)的遥感信息端元理论模型,利用线性光谱分离技术模型来提取isa。其中,主要遥感影像处理过程包括:图像裁切、最小噪声分离变换、纯净像元指数处理、n维可视化器收集端元、线性光谱分离、结果的检验校正等步骤,从而获得城市地区的不透水表面百分比例(0~100%),用于表征城市化的空间分布。
[0085]
由于esb代表的是生态系统服务,isa代表的是城市化强度和水平,因此,可以通过每个像元在不同年份的esb和每个像元在不同年份的isa之间的关系,可以确定出生态系统服务最受城市化影响的时段,从而确定出生态修复目标年份时段。
[0086]
步骤103、针对每个像元中的任一目标像元,根据目标像元在生态修复目标年份时段的isa变化率,以及目标像元的邻域像元在生态修复目标年份时段的esb变化率,确定目标像元的生态修复优先顺序。
[0087]
具体地,确定出生态修复目标年份时段后,可以确定每个像元中的任一目标像元
在生态修复目标年份时段的isa变化率,也可以确定该目标像元的领域像元在生态修复目标年份时段的esb变化率,根据二者可以确定出该目标像元的城市化对其领域像元的生态系统服务的影响,从而确定出目标像元的生态修复优先顺序。
[0088]
本发明提供的城市生态修复优先顺序识别方法,通过获取目标城市区域内多个生态系统服务指标在不同年份的空间分布数据并标准化处理,确定出目标城市区域内对应预设网格尺度的每个像元在不同年份的esb和isa,能够确定出生态修复目标年份时段,然后,根据生态修复目标年份时段的任一目标像元的isa变化率和目标像元的领域像元在该时段的esb变化率,从而确定出该目标像元的生态修复优先顺序。进而,能够划分出城市生态修复区的优先区域,提高城市区域生态修复的高效性与经济性。
[0089]
可选地,根据每个像元在不同年份的esb,以及每个像元在不同年份的不透水表面指数值isa,确定生态修复目标年份时段,包括:
[0090]
根据每个像元在不同年份的esb和isa,建立一元线性回归模型确定不同年份对应的esb相对于isa变化的斜率值;
[0091]
根据斜率值中的最大值和次大值所分别对应的年份,确定生态修复目标年份时段。
[0092]
具体地,确定生态修复优先顺序可以是通过建立一元线性回归模型来确定的。通过对每个像元的esb和isa的对应关系采样,可以建立出一元线性回归模型,用于确定城市化强度对生态系统服务簇的影响强度。该一元线性回归模型的公式如下:
[0093]
esb=α
esb
+β
esb
isa
[0094]
其中,esb和isa分别代表某一年份(例如:1980年)的生态系统服务簇值和不透水表面指数值,α
esb
为截距,β
esb
为斜率。
[0095]
因此,不同年份对应了不同的斜率值,可以用于比较某个像元的不同年份中的生态系统服务对城市化强度的反应。可以选择这些不同年份中斜率值最大值和次大值对应的两个年份,作为生态修复目标年份时段的起始时间和结束时间,从而得到生态修复目标年份时段。
[0096]
可选地,可以根据每个像元在生态修复目标年份时段间的esb变化值和isa变化值建立一元线性回归模型,公式如下:
[0097]
δesb=α
δesb
+β
δesb
δisa
[0098]
δesb和δisa分别代表了某个年份时段间(例如:1980-1990年间)生态系统服务簇与不透水表面指数的变化率,α
δesb
为截距,β
δesb
为斜率。
[0099]
对该公式中各个像元的esb变化率和isa变化率的回归关系进行考察,以回归关系的强度作为判定标准确定是否将得到的年份时段作为生态修复目标年份时段。
[0100]
可选地,根据目标像元在生态修复目标年份时段的isa变化率,以及目标像元的邻域像元在生态修复目标年份时段的esb变化率,确定目标像元的生态修复优先顺序,包括:
[0101]
根据目标像元在生态修复目标年份时段的isa变化率,以及目标像元的邻域像元在生态修复目标年份时段的esb变化率,确定目标像元对应的双变量莫兰指数,双变量莫兰指数用于表征esb与isa之间的空间相关性;
[0102]
根据目标像元对应的双变量莫兰指数和显著性检验结果,确定目标像元的生态修复优先顺序。
[0103]
具体地,确定了生态修复目标年份时段后,可以根据目标像元在生态修复目标年份时段的isa变化率,以及目标像元的邻域像元在生态修复目标年份时段的esb变化率,运用双变量局部莫兰模型来获取两者间的空间相关性。
[0104]
双变量局部莫兰模型的公式如下:
[0105][0106][0107]
其中,x为δisa,y为δesb。z
x,i
为目标像元i的δisa标准化值,z
y,j
是目标像元的邻域像元j的δesb标准化值;i
b,i
为两者在空间上的双变量莫兰指数。w
i,j
为相邻像元之间的空间邻接权重矩阵,当值为1时表示两者邻接,当值为0时表示两者不邻接。是像元i的δisa值,为像元i的相邻像元的δisa的均值,δ
x
为像元i的相邻像元的δisa的方差值;是像元j的δesb值,为像元j的相邻像元的δesb的均值,δy为像元j的相邻像元的δesb的方差值。
[0108]
通过双变量莫兰指数可以得知目标像元在生态修复目标年份时段的isa变化率和目标像元的邻域像元在生态修复目标年份时段的esb变化率之间的关系,再对得到的双变量莫兰指数结果进行显著性检验,综合目标像元的双变量莫兰指数和显著性检验的结果,可以确定该目标像元的生态修复优先顺序。
[0109]
可选地,根据目标像元对应的双变量莫兰指数和显著性检验结果,确定目标像元的生态修复优先顺序,包括:
[0110]
根据目标像元对应的双变量莫兰指数和显著性检验结果,确定目标像元对应的空间集聚区类型;
[0111]
根据空间集聚区类型,确定目标像元的生态修复优先顺序。
[0112]
具体地,得到目标像元对应的双变量莫兰指数和显著性检验结果后,可以根据双变量莫兰指数得知目标像元在生态修复目标年份时段的isa变化率和目标像元的邻域像元在生态修复目标年份时段的esb变化率之间的相关性的强弱。其中,双变量莫兰指数的取值范围在-1~1之间,其绝对值越大,表示相关性越强。
[0113]
然后对该结果进行显著性检验,可以根据显著性检验得到的p值结果确定该目标像元对应的空间集聚区类型。
[0114]
其中,空间集聚区类型包括以下五种:
[0115]
(1)高-高(h-h)集聚区,高-高集聚区用于表示城市化强度高同时对周边的生态系统服务损失也高的集聚区。
[0116]
具体地,当p《0.001时,可以将目标像元对应为h-h集聚区。
[0117]
(2)高-低(h-l)集聚区,高-低集聚区用于表示城市化强度高,但是对周边生态系统服务损失相对较小的集聚区。
[0118]
具体地,当0.001≤p《0.005时,可以将目标像元对应为h-l集聚区。
[0119]
(3)低-高(l-h)集聚区,低-高集聚区用于表示城市化强度变化较小,但是对周边的生态系统服务损失相对较高的集聚区。
[0120]
具体地,当0.005≤p《0.01时,可以将目标像元对应为l-h集聚区。
[0121]
(4)低-低(l-l)集聚区,低-低集聚区用于表示城市化强度变化较小,对周边的生态系统服务损失也相对较小的集聚区。
[0122]
具体地,当0.01≤p《0.05时,可以将目标像元对应为l-l集聚区。
[0123]
(5)不显著影响区,不显著影响区用于表示城市化强度和生态系统服务两者的变化关系趋于平衡,生态系统服务较好,或者城市化后期生态系统修复已有较好效果,或者城市化影响程度低的集聚区。
[0124]
具体地,当p≥0.05时,可以将目标像元对应为l-l集聚区。
[0125]
得到上述五种类型的集聚区后,可以确定目标像元的生态修复优先顺序。
[0126]
例如,高-高(h-h)集聚区可以划分为关键生态修复区,表示城市有潜力提供更高质量的生态系统服务,重点布局生态修复工程,重建类自然的生态系统,如郊野公园等等。高-低(h-l)集聚区则可以划分为重要生态修复区,通过引导人工生态修复措施,限制城市化对生态系统服务的影响,恢复生态系统的功能,快速城市化地区尚未开展生态建设区。低-高(l-h)集聚区,表示的是城市化对生态系统服务产生了难以逆转影响的区域,需要通过人工重建生态系统,进而恢复生态系统功能,例如流经城市化区域的河流生态系统和河岸带。低-低(l-l)集聚区,表示的是城市化强度对自然生态系统服务影响较小的区域,可以通过近自然解决方案,让生态系统自我修复,同时此区域可以通过提升交通可达性以提升居民的人类福祉。不显著影响区,该区域将在分区中不用布置显著的生态修复措施和工程。
[0127]
可选地,该方法还可以包括:
[0128]
根据标准化处理后的多个生态系统服务指标在不同年份的空间分布数据,进行预设网格尺度的生态系统服务指标聚类分析,确定目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇类型。
[0129]
具体地,得到多个生态系统服务指标在不同年份的空间分布数据的标准化值后,预先设定一个网格尺度,例如以1km作为网格尺度,可以进行预设网格尺度的生态系统服务指标聚类分析。
[0130]
可以将多个年份的预设的网格尺度的生态系统服务指标的标准值作为聚类样本,每个样本包含的是多个生态系统服务指标的标准值。每个类别中的样本所包含的多个生态系统服务指标的标准值分别在一个近似的范围内。
[0131]
例如,有7种生态系统服务指标:(1)生境质量,(2)碳储量,(3)土壤保持量,(4)水产量,(5)粮食供应量,(6)水果供应量,(7)公园服务能力。可以将生态系统服务指标的标准值划分为三个范围:高值区(值为0.6~1),中值区(值为0.2~0.6),低值区(值为0~0.2)。归类的结果可以是:
[0132]
一个类别中的样本为(1)、(2)、(4)三项生态系统服务指标的标准值处于高值区,(3)、(5)、(6)、(7)这四项生态系统服务指标的标准值处于低值区。
[0133]
一种实施方式中,可以采用k均值(k-means)算法进行预设网格尺度的生态系统服务指标聚类分析。
[0134]
一种实施方式中,可以通过calinsky准则来确定最佳聚类数,calinsky指数最大
时的聚类数即为最佳聚类数。计算calinsky指数的具体公式如下:
[0135][0136]
其中,ck为聚类数为k时的calinsky指数,ssb为组间误差平方和,ssw为组内误差平方和,n为样本数量。
[0137]
进行预设网格尺度的生态系统服务指标聚类分析,可以使得不同年份时间段之间更加具有可比性。能够通过生态服务簇类型的变化得知该区域具体的生态系统服务指标的变化情况。
[0138]
以下通过一个具体的实施例对本发明各上述实施例提供的方法进行说明。
[0139]
图2为本发明提供的一种城市生态修复优先区划分的流程示意图。如图2所示,该流程包括以下步骤:
[0140]
s1、数据获取与预处理。选择需要进行城市生态修复规划的地区作为研究区,获取对应的遥感影像数据、气温降水数据、土壤类型数据、道路网数据、数字高程模型、作物产量、公园绿地(范围及开放年份等)以及城市内行政区划数据。利用envi软件进行影像校正等预处理及监督分类与重分类工作。
[0141]
s2、城市生态系统服务评估。在指定城市研究区内,采用invest模型中的habitat quality模块评估生境质量、carbon模块计算城市多年分碳储量空间分布和动态变化;根据水量平衡方程计算评估时段的产水量;利用城市土地利用/覆盖类型数据中耕地和园地分布计算耕地面积和园地面积,结合粮食和水果亩产量计算粮食供给服务和水果供给服务;根据公园面积、类型、自然度和水体四个指标采用赋值法综合评估公园服务能力;并对上述七种生态系统服务指标进行标准化处理。
[0142]
s3、生态系统服务簇的识别。生态系统服务簇的识别基于聚类分析,采用k-means算法对城市生态系统服务进行聚类。主要过程分为s3.1和s3.2。
[0143]
s3.1、生态系统服务簇类别数量划定。通过calinsky准则确定最佳聚类数,具体定义如下:
[0144][0145]
其中,ck为聚类数为k时的calinsky指数,ssb为组间误差平方和,ssw为组内误差平方和,n为样本数量。
[0146]
s3.2、生态系统服务簇识别。根据上文得出的公里网格尺度生态系统服务标准值,以不同年份的所有公里网格为聚类样本,每个样本包含七个生态系统服务数据,将样本输入k-means算法进行聚类。根据聚类结果得到不同生态系统服务簇。
[0147]
s4、量化城市化过程指标。利用遥感影像基于v-i-s理论模型,利用线性光谱分离技术模型,解译指定区域指定时段的地表覆被特征,提取不透水表面指数的空间格局。主要遥感处理过程包括:图像裁切、最小噪声分离变换、纯净像元指数处理、n维可视化器收集端元、线性光谱分离、结果的检验校正等步骤。
[0148]
s5、量化城市化对生态系统服务簇的影响
[0149]
esb=α
esb
+β
esb
isa
[0150]
δesb=α
δesb
+β
δesb
δisa
[0151]
esb和isa分别代表生态系统服务簇与不透水表面指数,δesb和δisa分别代表了生态系统服务簇与不透水表面指数的变化,β
esb
与β
δesb
为斜率,代表生态系统服务簇对城市化(变化)强度的反应,α
esb
与α
δesb
为截距。
[0152]
s6、生态修复优先区的空间识别。运用双变量空间联系局部指标(bi-local indicators of spatial association,bi-lisa)的空间统计法,例如双变量局部莫兰指数法,探究esb的变化率与isa变化率间的空间相关性,从而划分出城市生态修复优先顺序,确定出城市生态修复优先区。
[0153]
本实施例根据城市研究区的城市化过程和生态系统服务问题,选取七种生态系统服务指标,包括支持服务(生境质量),供给服务(粮食供应量和水果供应量),调节服务(碳储量、土壤保持和产水量)以及文化服务(公园服务能力)开展长时间段生态系统服务评估;基于不透水表面指数与生态系统服务簇的变化的相关关系识别生态修复优先顺序识别。
[0154]
下面对本发明提供的城市生态修复优先顺序识别装置进行描述,下文描述的城市生态修复优先顺序识别装置与上文描述的城市生态修复优先顺序识别方法可相互对应参照。
[0155]
图3为本发明提供的城市生态修复优先顺序识别装置的结构示意图,如图3所示,该装置包括:
[0156]
标准化处理模块300,用于获取目标城市区域内多个生态系统服务指标在不同年份的空间分布数据并进行标准化处理;
[0157]
第一确定模块310,用于根据标准化处理后的多个生态系统服务指标在不同年份的空间分布数据,确定目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇值esb;
[0158]
第二确定模块320,用于根据每个像元在不同年份的esb,以及每个像元在不同年份的不透水表面指数值isa,确定生态修复目标年份时段;
[0159]
第三确定模块330,用于针对每个像元中的任一目标像元,根据目标像元在生态修复目标年份时段的isa变化率,以及目标像元的邻域像元在生态修复目标年份时段的esb变化率,确定目标像元的生态修复优先顺序。
[0160]
可选地,多个生态系统服务指标可以包括:生境质量、碳储量、土壤保持量、产水量、粮食供应量、水果供应量以及公园服务能力。
[0161]
可选地,根据每个像元在不同年份的esb,以及每个像元在不同年份的不透水表面指数值isa,确定生态修复目标年份时段,包括:
[0162]
根据每个像元在不同年份的esb和isa,建立一元线性回归模型确定不同年份对应的esb相对于isa变化的斜率值;
[0163]
根据斜率值中的最大值和次大值所分别对应的年份,确定生态修复目标年份时段。
[0164]
可选地,根据目标像元在生态修复目标年份时段的isa变化率,以及目标像元的邻域像元在生态修复目标年份时段的esb变化率,确定目标像元的生态修复优先顺序,包括:
[0165]
根据目标像元在生态修复目标年份时段的isa变化率,以及目标像元的邻域像元在生态修复目标年份时段的esb变化率,确定目标像元对应的双变量莫兰指数,双变量莫兰
指数用于表征esb与isa之间的空间相关性;
[0166]
根据目标像元对应的双变量莫兰指数和显著性检验结果,确定目标像元的生态修复优先顺序。
[0167]
可选地,根据目标像元对应的双变量莫兰指数和显著性检验结果,确定目标像元的生态修复优先顺序,包括:
[0168]
根据目标像元对应的双变量莫兰指数和显著性检验结果,确定目标像元对应的空间集聚区类型;
[0169]
根据空间集聚区类型,确定目标像元的生态修复优先顺序;
[0170]
其中,空间集聚区类型包括以下五种:
[0171]
高-高集聚区,高-高集聚区用于表示城市化强度高同时对周边的生态系统服务损失也高的集聚区;
[0172]
高-低集聚区,高-低集聚区用于表示城市化强度高,但是对周边生态系统服务损失相对较小的集聚区;
[0173]
低-高集聚区,低-高集聚区用于表示城市化强度变化较小,但是对周边的生态系统服务损失相对较高的集聚区;
[0174]
低-低集聚区,低-低集聚区用于表示城市化强度变化较小,对周边的生态系统服务损失也相对较小的集聚区;
[0175]
不显著影响区,不显著影响区用于表示城市化强度和生态系统服务两者的变化关系趋于平衡,生态系统服务较好,或者城市化后期生态系统修复已有较好效果,或者城市化影响程度低的集聚区。
[0176]
可选地,第一确定模块310还可以用于:
[0177]
根据标准化处理后的多个生态系统服务指标在不同年份的空间分布数据,进行预设网格尺度的生态系统服务指标聚类分析,确定目标城市区域内对应预设网格尺度的每个像元在不同年份的生态系统服务簇类型。
[0178]
在此需要说明的是,本发明提供的上述装置,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0179]
图4为本发明提供的电子设备的结构示意图,如图4所示,该电子设备可以包括:处理器(processor)410、通信接口(communications interface)420、存储器(memory)430和通信总线440,其中,处理器410,通信接口420,存储器430通过通信总线440完成相互间的通信。处理器410可以调用存储器430中的逻辑指令,以执行上述各实施例提供的任一所述城市生态修复优先顺序识别方法。
[0180]
此外,上述的存储器430中的逻辑指令可以通过软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种
可以存储程序代码的介质。
[0181]
在此需要说明的是,本发明提供的电子设备,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0182]
另一方面,本发明还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,计算机程序可存储在非暂态计算机可读存储介质上,所述计算机程序被处理器执行时,计算机能够执行上述各实施例提供的任一所述城市生态修复优先顺序识别方法。
[0183]
在此需要说明的是,本发明提供的计算机程序产品,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0184]
又一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现以执行上述各实施例提供的任一所述城市生态修复优先顺序识别方法。
[0185]
在此需要说明的是,本发明提供的非暂态计算机可读存储介质,能够实现上述方法实施例所实现的所有方法步骤,且能够达到相同的技术效果,在此不再对本实施例中与方法实施例相同的部分及有益效果进行具体赘述。
[0186]
以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
[0187]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
[0188]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1