一种轨迹异常检测方法与流程
1.本发明涉及计算机和定位技术,具体涉及一种轨迹异常检测方法。
背景技术:
2.随着计算机技术和定位技术的飞速发展,各类移动目标的位置及相关状态信息被大量采集,从而生成了轨迹大数据集。轨迹大数据中分析提取出的价值信息在不同学科领域都有着非常重要的研究意义。然而,由于现实技术因素限制(信号丢失或被干扰、机器故障、人为操作误差等),轨迹数据不可能完全正确,其中必定存在诸多异常点。这些异常点降低了整段轨迹的数据质量,甚至会严重影响后续对于轨迹数据中价值信息的挖掘。因此,一种有效的异常点检测方法就显的尤为重要。
3.目前,应用最广泛的异常检测方法是速度阈值法。该方法通过位置和时间信息计算出当前点与前一个点之间的速度,与设定的阈值比较,若大于阈值,则判定其为异常点;反之,则判定为正常点,并依此类推至结束。这种方法有以下的局限性:1)不同目标轨迹的速度阈值不同,难以直接找到一个合理的阈值;2)基于前一个点来判断异常无法适用于前一个点也异常的情况。
4.[1]高强,张凤荔,王锦瑞,周帆.轨迹大数据:数据处理关键技术研究综述[j].软件学报,2017,28(04):959-992.
[0005]
[2]李楠,强懿耕,樊瑞,焦庆宇.基于异常因子的航空器飞行轨迹异常检测研究[j].安全与环境学报,2021,21(02):643-648.
[0006]
[3]韩昭蓉,许光銮,黄廷磊,任文娟.基于自适应阈值的船舶轨迹异常点检测算法[j].计算机与现代化,2018(09):42-47+51.
[0007]
[4]陈影玉,杨神化,索永峰.船舶行为异常检测研究进展[j].交通信息与安全,2020,38(05):1-11.
[0008]
[5]裴浩然.移动对象轨迹时空异常检测算法研究[d]中国矿业大学,2020.
技术实现要素:
[0009]
本发明的目的在于提出一种轨迹异常检测方法。
[0010]
实现本发明目的的技术解决方案为:一种轨迹异常检测方法,包括如下步骤:
[0011]
针对所有轨迹点,计算其与前一个点间的轨迹速度,构建轨迹速度数据集;
[0012]
基于拉依达准则,计算轨迹的速度阈值,计算公式如下:
[0013][0014]
其中,为平均速度,c为标准差倍数,σ为轨迹速度的标准差,v
th
为速度阈值,当v
th
》v
thmax
时,令v
th
=v
thmax
;否则,令v
th
=v
thmin
,v
thmin
为速度阈值的最小值,v
thmax
为速度阈值的最大值;
[0015]
将每点的速度值与速度阈值比较,得到轨迹速度大于速度阈值的异常点;
[0016]
利用异常点将轨迹分段,将轨迹段由长至短排序,依次计算每两条轨迹端点之间的速度,若大于速度阈值,则将两轨迹间较短轨迹视为异常轨迹;
[0017]
剔除异常轨迹段,将正常轨迹段按时间顺序重新组合。
[0018]
进一步的,针对所有轨迹点,计算其与前一个点间的轨迹速度,具体方法为:
[0019]
速度计算公式为:
[0020]vi
=dist(pi,p
i-1
)/(t
i-t
i-1
),i>1
ꢀꢀꢀ
(2)
[0021]
其中,p={p1,p2,p3...pn}表示轨迹数据集,dist(pi,p
i-1
)表示第i个轨迹点pi与其前一个点p
i-1
之间的距离,ti与t
i-1
为两点的时间戳,得到的轨迹速度数据集为v={v2,v3,v4...vn}。
[0022]
进一步的,标准差倍数c》3。
[0023]
进一步的,依次计算每两条轨迹端点之间的速度,具体方法为:
[0024]
设l={l1,l2,l3...,ln}表示排序后的轨迹段集合,l1为最长轨迹段,若lk时间在lm前,则取lk轨迹段末点与lm轨迹段首点进行两条轨迹端点之间的速度计算,反之取lm轨迹段末点与lk轨迹段首点进行两条轨迹端点之间的速度计算。
[0025]
一种轨迹异常检测系统,基于所述的轨迹异常检测方法,实现轨迹异常检测。
[0026]
一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,基于所述的轨迹异常检测方法,实现轨迹异常检测。
[0027]
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,基于所述的轨迹异常检测方法,实现轨迹异常检测。
[0028]
本发明与现有技术相比,其显著优点为:是一个通用的、合理的轨迹速度阈值的计算方法,适用于各类不同目标,解决了通用速度阈值法中无法确定前一个点是否为异常点的问题。
附图说明
[0029]
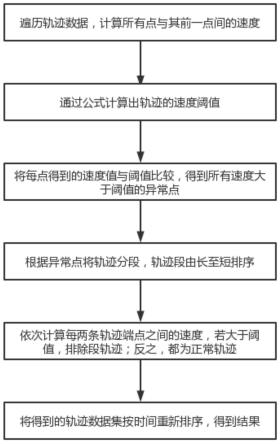
图1为本发明一种轨迹异常检测方法的流程图。
具体实施方式
[0030]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
[0031]
本发明一种轨迹异常检测方法,包括如下步骤:
[0032]
(1)遍历轨迹数据,计算各点与其前一点间的速度,得到轨迹速度数据集;
[0033]
(2)基于轨迹速度数据集计算出轨迹的速度阈值;
[0034]
轨迹数据均可视为大数据样本,因此速度阈值计算公式依据数理统计学中拉依达准则(即3σ准则)得出。
[0035]
拉依达准则:先假设一组检测数据只含有随机误差,对其进行计算处理得到标准偏差,按一定概率确定一个区间,认为凡超过这个区间的误差,就不属于随机误差而是粗大误差,含有该误差的数据应予以剔除。
[0036]
这种判别处理原理及方法仅局限于对正态或近似正态分布的样本数据处理,它是以测量次数充分为大为前提的,当测量次数少的情形用该准则剔除粗大误差是不够可靠的。
[0037]
在正态分布中σ代表标准差,μ代表均值,3σ原则为:数值分布在(μ-σ,μ+σ)中的概率为0.6826,数值分布在(μ-2σ,μ+2σ)中的概率为0.9545,数值分布在(μ-3σ,μ+3σ)中的概率为0.9973。可以认为,数值分布几乎全部集中在(μ-3σ,μ+3σ)区间内,超出这个范围的可能性仅占不到0.3%。
[0038]
在基于拉依达准则的实际计算过程中发现两个问题:(1)轨迹数据的异常点主要受现实技术因素影响(信号丢失或被干扰、机器故障、人为操作误差等)而产生,不能简单将其归纳为随机误差。(2)如果存在某个异常点极大得偏离了正常值,那么由此计算得出得均值也会受到影响。
[0039]
基于以上两点,公式放大了标准差σ的倍数定义为c,即c》3。同时,根据目标类型(飞机、船舶、车辆等)设定了不同类型目标的速度阈值的取值范围,防止阈值超出目标实际运动能力。速度阈值计算公式如下:
[0040][0041]
其中,v
th
为速度阈值,为平均速度,c为标准差倍数,σ为轨迹速度的标准差,v
thmin
为速度阈值的最小值,v
thmax
为速度阈值的最大值,即当v
th
》v
thmax
时,v
th
=v
thmax
;当v
th
《v
thmin
时,v
th
=v
thmin
。本发明设定了通用的阈值上下界,参数的具体取值见表1。如有特殊要求,可根据参考目标型号性能进行调整。
[0042]
表1方法中参数值的设置
[0043]
参数名称值标准差倍数c6飞机速度阈值上界v
thmax
2500km/h飞机速度阈值下界v
thmin
500km/h船舶速度阈值上界v
thmax
40节船舶速度阈值下界v
thmin
15节
[0044]
(3)将每点的速度值与阈值比较,得到所有速度大于阈值的异常点;
[0045]
(4)根据异常点将轨迹分段,轨迹段由长至短排序,默认最长轨迹段一定不是噪点;
[0046]
(5)根据长短顺序依次计算每两条轨迹端点(时间在前轨迹段的末点和时间在后轨迹段的首点)之间的速度,若大于速度阈值,则将两轨迹间较短轨迹视为异常轨迹;
[0047]
(6)排除异常轨迹段后,将正常轨迹段按时间顺序重新组合,得到结果。
[0048]
实施例
[0049]
为了验证本发明方案的有效性,进行如下实验。
[0050]
步骤1:遍历轨迹数据,计算所有点与其前一点间的速度;
[0051]
步骤1.1:目标轨迹数据由有限个有始有终的离散的轨迹点组成,任一轨迹点应带有经纬度、时间戳、目标类型等细节信息。轨迹数据集p={p1,p2,p3...pn},以第i个点pi为例,将pi与p
i-1
的位置信息与时间戳代入速度计算公式,得到pi的速度值。速度计算公式为:
[0052]vi
=dist(pi,p
i-1
)/(t
i-t
i-1
) (i>1)
ꢀꢀ
(2)
[0053]
其中,dist(pi,p
i-1
)表示pi与其前一个点p
i-1
之间的距离,ti与t
i-1
为两点的时间戳。计算得到轨迹数据的速度值集合v={v2,v3,v4...vn}。
[0054]
步骤2:通过公式计算出轨迹的速度阈值;
[0055]
步骤2.1:基于步骤1得到的速度值集合v,计算出平均速度速度标准差σ,标准差倍数c的取值为6,代入速度阈值计算公式,得出轨迹的速度阈值v
th
,速度阈值计算公式的详细说明见第二部分。
[0056][0057]
步骤2.2:基于轨迹数据的目标型号信息确定速度阈值的取值范围,若目标型号确定,则参考该型号目标的性能参数确定v
thmin
与v
thmax
;若目标型号不确定,则依据目标类型(飞机或船舶)与表1确定v
thmin
与v
thmax
。
[0058]
步骤2.3:当v
th
》v
thmax
,即计算结果大于设定得阈值最大范围时v
th
=v
thmax
;当v
th
《v
thmin
,即计算结果小于设定得阈值最小范围时v
th
=v
thmin
;当v
thmin
≤v
th
≤v
thmax
时,v
th
直接取计算结果。
[0059]
步骤3:将速度集合v与阈值一一比较,若第i个点的速度vi<v
th
,则pi为正常点;反之,pi为异常点。依此得到所有异常点集合。
[0060]
步骤4:根据异常点将轨迹分段,轨迹段由长至短排序,得到轨迹段集合l={l1,l2,l3...,ln}。显然,l1为最长轨迹段,不可能存在异常值。
[0061]
步骤5:轨迹段集合l中,依序对两轨迹段端点计算速度;
[0062]
步骤5.1:以l1与ln两轨迹段为例,若l1时间在ln前,则取l1轨迹段末点与ln轨迹段首点;反之,取ln轨迹段末点与l1轨迹段首点。两点为p
l1
与p
ln
。
[0063]
步骤5.2:假设p
l1
时间戳大于p
ln
,将p
l1
与p
ln
的位置信息与时间戳代入步骤1中的速度计算公式,得到两点间的速度v
l
:
[0064]vl
=dist(p
l1
,p
ln
)/(t
l1-t
ln
)
[0065]
步骤5.3:将v
l
与步骤2中得到的速度阈值v
th
比较,若v
l
>v
th
,则l1与ln中短轨迹为异常轨迹;反之,两条轨迹均为正常轨迹。
[0066]
步骤5.4:以此类推,集合l中所有轨迹段按顺序两两比较,排除异常轨迹段。
[0067]
步骤6:将集合l中所有轨迹点重新排序,得到去除异常点后的正常轨迹。
[0068]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0069]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1