NSST域红外目标分割及SURF匹配的浮选泡沫流速检测方法
nsst域红外目标分割及surf匹配的浮选泡沫流速检测方法
技术领域
1.本发明涉及图像处理技术领域,特别是一种nsst域红外目标分割及surf匹配的浮选泡沫流速检测方法。
背景技术:
2.浮选是浮选机内矿物与空气中的微气泡发生碰撞粘附,利用矿物与杂质表面的亲疏水性质,可浮性高的矿物颗粒随着气泡上浮至液面泡沫层,从而将目标矿物从物质组成复杂的矿石中分选出来的选矿方法。浮选生产工艺受多种物理化学因数的影响,研究人员发现泡沫表面的流动特征与浮选生产工艺指标密切相关,气泡的流动性反映了所采用的选矿工艺是否优质,也有效地反映了矿物含量,泡沫流速的精确提取能客观描述浮选气泡的流动性,对浮选生产指标预测和工艺改善具有重要意义。
3.近几年,出现了几种泡沫流动特征提取方法。一种结合气泡亮点分割和相位相关法估计气泡的流动速度,但是该方法的分割精度受气泡形变和光照的影响大,而且相位相关法计算获取的是两帧图像的相对位移,不具备全局性;一种采用相邻领域匹配块搜索法实现泡沫流动速度检测,该方法运行效率高,但易受外界光照因素影响,匹配精度不高;一种采用像素点跟踪技术计算连续帧间的平均流动速度,该方法运行效率高,但是像素值在流动过程容易受噪声和光照影响而产生变化,导致像素点跟踪出错;一种将sift(scale invariant feature transform)算法应用到泡沫流动速度的检测中,根据匹配结果计算流速大小和方向,匹配精度高,而且受噪声和光照的影响小,但sift计算复杂,实时性不强。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种nsst域红外目标分割及surf匹配的浮选泡沫流速检测方法,实现减少噪声影响,提升分割精度。在nsst域改进surf的特征方向确定和特征点描述方法,不仅极大提升运算效率和匹配精度,还提高算法整体的鲁棒性。
5.为实现上述目的,本发明采用如下技术方案:nsst域红外目标分割及surf匹配的浮选泡沫流速检测方法,包括以下步骤:
6.step1:抽取时间间隔为δt的连续两帧泡沫红外图像i
t
和i
t+1
,对i
t
和i
t+1
进行nsst多尺度分解,分别得到1个低通子带图像和k个尺度高频子带,各尺度高频子带再分解为l个方向子带;
7.step2:对i
t
和i
t+1
的低频图像构建亮度约束项,同时对低频图像进行分数阶微分显著性检测,然后构建显著性约束项;
8.step3:对i
t
和i
t+1
的k个尺度高频子带,根据系数的尺度相关性进行噪声去除,然后构建边界约束项;
9.step4:构造一个包含亮度约束项、显著性约束项、边界约束项的图割能量函数,然后利用最大流/最小割算法求解能量函数的最小值,实现合并、破碎气泡的分割;
10.step5:对i
t
和i
t+1
分割后的背景区域进行surf尺度空间极值提取、特征点检测;
11.step6:在多尺度高频子带以特征点所在位置为圆心,计算扇形内所有点的尺度相关系数corr(i,j)的总和,然后旋转扇形使其遍历整个圆形区域,将corr(i,j)总和最大值的扇形的方向作为特征点主方向;
12.step7:以特征点为中心旋转坐标轴到主方向后,将周边领域划分为16个子区域,计算每一点的8个方向的尺度系数之和c
l
(i,j),然后统计每个子区域的8个方向的系数和,将每个方向的系数和作为特征向量,得到一个128维的特征描述符;
13.step8:对i
t
和i
t+1
分割后的背景区域进行特征点匹配,并采用ransac算法剔除误匹配点;
14.step9:对i
t
和i
t+1
的n对匹配点,它们在i
t
和i
t+1
的位置分别为和通过式(16)计算该点的水平流动速度垂直流动速度计算平均水平流动速度v
x
和平均垂直流动速度vy;
15.step10:计算当前的泡沫平均流动速度和方向,假设前一时刻检测的水平流动速度为v
x
',垂直流动速度为vy',计算当前的水平流动加速度a
x
和垂直流动加速度ay,计算流动速度和方向的无序度,和方向为前一段时间的平均流动速度和方向。
16.在一较佳的实施例中,图像通过k级非下采样金字塔nsp多尺度分解后,得到k+1个子带图像,其中包括1个低频图像和k个尺度不同的高频图像,高频图像进行l级多方向分解,分解为2l+2个方向子带图像;泡沫低频图像去除噪声,保留气泡轮廓信息;高频子带图像包含气泡边缘、纹理特征、梯度信息、以及噪声系数,为红外目标分割提供边界参考信息,代替haar小波响应为surf建立多尺度多方向的特征描述。
17.在一较佳的实施例中,假设表示第k尺度第l方向高频子带在(i,j)点的系数,表示第k尺度第l方向的子带系数能量,定义像素点(i,j)在第k尺度第l方向高频子带上的尺度相关系数为:
[0018][0019]
其中,表示不同尺度在(i,j)位置上的系数乘积,表示第k尺度第l方向子带的系数能量,是便于系数比较的归一化处理;泡沫图像经nsst分解后,随着尺度越来越精细,噪声系数迅速衰减,边缘系数相对稳定,即边缘系数强相关,而噪声系数弱相关,根据此特点将剔除噪声系数:
[0020][0021]
在一较佳的实施例中,surf特征点检测前先对合并、破碎气泡进行分割;对浮选槽表面的泡沫进行红外热成像;气泡产生破碎或合并后释放出热量,热成像后呈现出高亮的黄色区域;
[0022]
图像nsst分解后,合并、破碎气泡对应低频图像中的显著性区域,高频子带图像包含的边缘和梯度信息为红外目标分割提供边界参考信息;首先构造一个包含区域项和边界
项的能量函数,建立图割模型:
[0023][0024]
上式中,a为图像的像素点集合,为图割能量函数的区域项,fi(fa)为亮度约束项,fs(v
′i)为显著性约束项,α和β为约束项的权重系数,且α+β=1,为边界约束项,最后利用最大流/最小割算法求解能量函数的最小值,得到分割结果;三个约束项的构建如下:
[0025]
(1)低频图像亮度约束项构建
[0026]
假设i为低频图像亮度,亮度范围为[i
l
,ih],ia为像素点a的亮度值,构建亮度约束项fi(fa)为:
[0027][0028][0029][0030]
上式中,fi(i)为基于高斯拟合的亮度函数,k为前景目标区域与背景区域的对比度调节因子;
[0031]
(2)低频图像显著性检测及约束项构建
[0032]
图像nsst分解后,合并、破碎气泡对应低频图像中的显著性区域,在低频图像进行显著性检测及约束项构建;针对低频图像的显著性检测,采用分数阶微分显著性检测方法,显著值计算公式为:
[0033]
s(x,y)=||i
u-i
fd
(x,y)||
ꢀꢀ
(7)
[0034]
上式中,iu为输入图像i的l、a、b通道均值,i
fd
(x,y)为输入图像i经过分数阶微分增强之后在l、a、b三通道的图像均值,||
·
||是对三通道均值和滤波得到的图像取欧氏距离并求和;根据显著性检测结果构建显著性约束项,建立约束项fs(v
′i):
[0035][0036][0037]
[0038][0039]
上式中:s
′i为每个显著块对应的平均显著值,n为显著区域块个数,s
′
为整体的平均显著值,s
′
fi
为前景的显著均值,s
′
bi
为背景的显著均值;
[0040]
(3)高频子带边界约束项构建
[0041]
高频子带图像包含的边缘和梯度信息为图割提供边界参考信息,构造图割能量函数中的边界项b(fa,fb):
[0042][0043][0044]
上式中,ca、cb分别表示k个高频尺度在像素点a、像素点b的系数平均值,d(a,b)为a和b之间的欧式距离,ca为图像a的像素点总数。
[0045]
在一较佳的实施例中,在高频子带采用高频子带系数及系数相关性代替harr小波响应改进特征方向确定和特征点描述方法:
[0046]
1)特征方向确定
[0047]
确定特征点位置后,在多尺度高频子带以特征点所在位置为圆心,6s,s为该特征点对应的尺度值,为半径的邻域内,计算60
°
扇形内所有点的尺度相关系数corr(i,j)的总和,其中每个点的corr(i,j)计算:
[0048][0049]
上式中,k为分解的尺度数,l为分解的方向数;然后旋转扇形使其遍历整个圆形区域,将尺度相关系数corr(i,j)总和最大值的扇形的方向作为该特征点的方向;
[0050]
2)特征描述符生成
[0051]
以特征点为中心旋转坐标轴到主方向后,选取边长为20s的正方形区域,并将其划分为16个子区域,计算每一点的8个方向的尺度系数之和:c0(i,j)、c1(i,j)、
…
、c8(i,j):
[0052][0053]
然后统计每个子区域的8个方向的系数和,箭头方向代表8个方向的尺度系数系数之和,其特征描述符用4
×4×
8维的系数描述向量,得到一个128维的特征描述符。
[0054]
在一较佳的实施例中,在step9中,对i
t
和i
t+1
的n对匹配点,它们在i
t
和i
t+1
的位置分别为和通过式(16)计算该点的水平流动速度垂直流动速度通过式(17)计算平均水平流动速度v
x
和平均垂直流动速度vy;
[0055]
[0056][0057]
在一较佳的实施例中,在step10中,通过式(18)计算当前的泡沫平均流动速度和方向,假设前一时刻检测的水平流动速度为v
x
',垂直流动速度为vy',通过式(19)计算当前的水平流动加速度a
x
和垂直流动加速度ay,通过式(20)计算流动速度和方向的无序度,和方向为前一段时间的平均流动速度和方向;
[0058][0059][0060][0061]
与现有技术相比,本发明具有以下有益效果:本发明提出了一种nsst域红外目标及改进surf匹配的泡沫表面流速检测方法。在nsst域下进行多尺度高频子带去噪,减少了噪声影响,然后构建一个包含边界、亮度、显著性约束项的图割能量函数,有利于准确估计泡沫红外图像的目标区域与背景,减少了过分割和欠分割现象,提升了分割精度;对分割后的背景区域进行surf特征点检测,通过统计扇形区域内的尺度相关系数确定特征点主方向,采用特征点邻域的多方向高频系数构造特征描述符,改善了surf算法的抗噪声和尺度变换性能,提升了匹配精度。本发明实现了泡沫表面流动特征的定量描述,流速检测受气泡合并、破碎的影响小,检测精度和运算效率较现有方法有较大提高,为后续的加药量优化控制奠定基础。
附图说明
[0062]
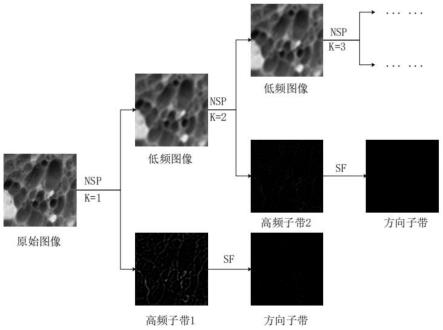
图1为本发明优选实施例的气泡图像多尺度变换示意图;
[0063]
图2为本发明优选实施例的浮选泡沫红外热成像示意图;
[0064]
图3为本发明优选实施例的特征主方向确定示意图;
[0065]
图4为本发明优选实施例的构建特征描述符示意图;
[0066]
图5为本发明优选实施例的泡沫流动速度检测流程图;
[0067]
图6为本发明优选实施例的目标分割结果及对比示意图;
[0068]
图7为本发明优选实施例的改进surf的匹配结果及比较示意图;
[0069]
图8为本发明优选实施例的流速检测效果及比较示意图。
具体实施方式
[0070]
下面结合附图及实施例对本发明做进一步说明。
[0071]
应该指出,以下详细说明都是例示性的,旨在对本技术提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
[0072]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根
据本技术的示例性实施方式;如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
[0073]
一种nsst域红外目标分割及改进surf匹配的浮选泡沫表面流速检测方法。首先,对相邻两帧泡沫红外图像nsst分解,在多尺度域构建图割的边界、亮度、显著性约束项实现对合并、破碎气泡的分割;然后,对分割后的背景区域进行surf特征点检测和定位,通过统计扇形区域内的尺度相关系数确定特征点主方向,采用特征点邻域的多方向高频系数构造特征描述符;最后,对相邻两帧泡沫红外图像进行特征点匹配,根据匹配结果计算泡沫流速的大小、方向、加速度、无序度。
[0074]
详细的技术方案如下:
[0075]
泡沫红外图像nsst分解及去噪
[0076]
非下采样shearlet变换包括多尺度分解和多方向分解两部分,如图1所示,泡沫红外图像中合成、破碎气泡对应图中的高温黄色区域,图像通过k级非下采样金字塔(nsp)多尺度分解后,得到k+1个子带图像,其中包括1个低频图像和k个尺度不同的高频图像,高频图像进行l级多方向分解,分解为2l+2个方向子带图像。泡沫低频图像去除了噪声,保留气泡轮廓信息,提高了高温区域的显著性,有利于定位合成、破碎的气泡。高频子带图像包含气泡边缘、纹理特征、梯度信息、以及噪声系数,为红外目标分割提供边界参考信息,可代替haar小波响应为surf建立多尺度多方向的特征描述。
[0077]
为避免噪声对后续处理带来影响,在多尺度高频子带去除噪声,假设表示第k尺度第l方向高频子带在(i,j)点的系数,表示第k尺度第l方向的子带系数能量,定义像素点(i,j)在第k尺度第l方向高频子带上的尺度相关系数为:
[0078][0079]
其中,表示不同尺度在(i,j)位置上的系数乘积,表示第k尺度第l方向子带的系数能量,是便于系数比较的归一化处理。泡沫图像经nsst分解后,随着尺度越来越精细,噪声系数迅速衰减,边缘系数相对稳定,即边缘系数强相关,而噪声系数弱相关,根据此特点将剔除噪声系数:
[0080][0081]
nsst域泡沫红外目标分割
[0082]
为减少合并、破碎气泡对泡沫流速检测的影响,surf特征点检测前先对合并、破碎气泡进行分割。对浮选槽表面的泡沫进行红外热成像,如图2所示,对产生破碎、合并的气泡具有一定的展现效果,气泡产生破碎或合并后释放出热量,热成像后呈现出高亮的黄色区域,图2(a)中有两个气泡产生崩塌,图2(b)三个小气泡合并成一个大气泡,图2(c)泡沫可见光图像中无法直接区分破碎、合并气泡,而对应的红外热成像图2(d)中直接展现了产生破碎、合并的气泡。因此,可通过对红外图像中高温区域目标分割以实现合并、破碎气泡的提
取。
[0083]
图像nsst分解后,合并、破碎气泡对应低频图像中的显著性区域,高频子带图像包含的边缘和梯度信息为红外目标分割提供边界参考信息,本发明在图割算法基础上,在nsst多尺度域构建图割的边界、亮度、显著性约束项实现对合并、破碎气泡的分割。首先构造一个包含区域项和边界项的能量函数,建立图割模型:
[0084][0085]
上式中,a为图像的像素点集合,为图割能量函数的区域项,fi(fa)为亮度约束项,fs(vi′
)为显著性约束项,α和β为约束项的权重系数,且α+β=1,为边界约束项,最后利用最大流/最小割算法求解能量函数的最小值,得到分割结果。三个约束项的构建如下:
[0086]
(1)低频图像亮度约束项构建
[0087]
假设i为低频图像亮度,亮度范围为[i
l
,ih],ia为像素点a的亮度值,构建亮度约束项fi(fa)为:
[0088][0089][0090][0091]
上式中,fi(i)为基于高斯拟合的亮度函数,k为前景目标区域与背景区域的对比度调节因子。
[0092]
(2)低频图像显著性检测及约束项构建
[0093]
图像nsst分解后,合并、破碎气泡对应低频图像中的显著性区域,在低频图像进行显著性检测及约束项构建。针对低频图像的显著性检测,采用分数阶微分显著性检测方法,显著值计算公式为:
[0094]
s(x,y)=||i
u-i
fd
(x,y)||
ꢀꢀ
(7)
[0095]
上式中,iu为输入图像i的l、a、b通道均值,i
fd
(x,y)为输入图像i经过分数阶微分增强之后在l、a、b三通道的图像均值,||
·
||是对三通道均值和滤波得到的图像取欧氏距离并求和。根据显著性检测结果构建显著性约束项,建立约束项fs(v
′i):
[0096][0097]
[0098][0099][0100]
上式中:s
′i为每个显著块对应的平均显著值,n为显著区域块个数,s
′
为整体的平均显著值,s
′
fi
为前景的显著均值,s
′
bi
为背景的显著均值。
[0101]
(3)高频子带边界约束项构建
[0102]
高频子带图像包含的边缘和梯度信息为图割提供边界参考信息,构造图割能量函数中的边界项b(fa,fb):
[0103][0104][0105]
上式中,ca、cb分别表示k个高频尺度在像素点a、像素点b的系数平均值,d(a,b)为a和b之间的欧式距离,ca为图像a的像素点总数。
[0106]
nsst域surf特征方向及描述改进
[0107]
传统的surf算法主要分为5个步骤:尺度空间极值提取、特征点定位、确定特征方向、特征点描述、特征点匹配。传统surf算法是在灰度图片下提取特征点并用以寻找匹配对的方法,只考虑图像的亮度信息,忽略了图像中蕴含的大量的边缘信息和纹理细节,提取的特征描述信息不全、易出现误匹配现象。本发明改进surf算法,在高频子带采用高频子带系数及系数相关性代替harr小波响应改进特征方向确定和特征点描述方法:
[0108]
(1)特征方向确定
[0109]
确定特征点位置后,在多尺度高频子带以特征点所在位置为圆心,6s(s为该特征点对应的尺度值)为半径的邻域内,如图3所示,计算60
°
扇形内所有点的尺度相关系数corr(i,j)的总和,其中每个点的corr(i,j)计算:
[0110][0111]
上式中,k为分解的尺度数,l为分解的方向数。然后旋转扇形使其遍历整个圆形区域,将尺度相关系数corr(i,j)总和最大值的扇形的方向作为该特征点的方向。
[0112]
(2)特征描述符生成
[0113]
以特征点为中心旋转坐标轴到主方向后,如图4所示,选取边长为20s的正方形区域,并将其划分为16个子区域,计算每一点的8个方向的尺度系数之和:c0(i,j)、c1(i,j)、
…
、c8(i,j):
[0114][0115]
然后统计每个子区域的8个方向的系数和,箭头方向代表8个方向的尺度系数系数之和,其特征描述符可以用4
×4×
8维的系数描述向量,得到一个128维的特征描述符。
[0116]
具体实现流程与步骤
[0117]
综上所述,nsst域红外目标分割及surf匹配的泡沫流速检测方法流程如图5所示,具体实现步骤如下:
[0118]
step1:抽取时间间隔为δt的连续两帧泡沫红外图像i
t
和i
t+1
,对i
t
和i
t+1
进行nsst多尺度分解,分别得到1个低通子带图像和k个尺度高频子带,各尺度高频子带再分解为l个方向子带;
[0119]
step2:对i
t
和i
t+1
的低频图像通过式(4)-(6)构建亮度约束项,同时对低频图像进行分数阶微分显著性检测,然后通过式(8)-(11)构建显著性约束项;
[0120]
step3:对i
t
和i
t+1
的k个尺度高频子带,根据系数的尺度相关性进行噪声去除,然后通过式(12)-(13)构建边界约束项;
[0121]
step4:构造一个包含亮度约束项、显著性约束项、边界约束项的图割能量函数,然后利用最大流/最小割算法求解能量函数的最小值,实现合并、破碎气泡的分割;
[0122]
step5:对i
t
和i
t+1
分割后的背景区域进行surf尺度空间极值提取、特征点检测;
[0123]
step6:在多尺度高频子带以特征点所在位置为圆心,通过式(14)计算扇形内所有点的尺度相关系数corr(i,j)的总和,然后旋转扇形使其遍历整个圆形区域,将corr(i,j)总和最大值的扇形的方向作为特征点主方向;
[0124]
step7:以特征点为中心旋转坐标轴到主方向后,将周边领域划分为16个子区域,通过式(15)计算每一点的8个方向的尺度系数之和c
l
(i,j),然后统计每个子区域的8个方向的系数和,将每个方向的系数和作为特征向量,得到一个128维的特征描述符。
[0125]
step8:对i
t
和i
t+1
分割后的背景区域进行特征点匹配,并采用ransac算法剔除误匹配点。
[0126]
step9:对i
t
和i
t+1
的n对匹配点,它们在i
t
和i
t+1
的位置分别为和通过式(16)计算该点的水平流动速度垂直流动速度通过式(17)计算平均水平流动速度v
x
和平均垂直流动速度vy。
[0127][0128][0129]
step10:通过式(18)计算当前的泡沫平均流动速度和方向,假设前一时刻检测的水平流动速度为v
x
',垂直流动速度为vy',通过式(19)计算当前的水平流动加速度a
x
和垂直流动加速度ay,通过式(20)计算流动速度和方向的无序度,和方向为前一段时间的平均流动速度和方向。
[0130][0131]
[0132][0133]
具体的实施例及说明
[0134]
泡沫红外目标分割效果
[0135]
为验证破碎、合并气泡的分割效果,将本发明分割结果与经典分割方法结果做对比,验证其准确性。对图6(a)泡沫红外图像进行nsst分解及目标分割,图6(b)~图6(c)为分解后的低频图像及高频子带图像,图6(d)为低频图像的分数阶微分显著性检测结果。图6(e)为区域生长法气泡提取效果,存在目标区域空洞和边缘模糊问题;图6(f)为边缘分割算法气泡提取效果,具有边缘杂乱和欠分割问题;图6(g)为k聚类算法分割结果,分割目标区域边缘清晰但精度不高;图6(h)为本发明红外目标分割结果,通过低频图像构建亮度约束项,根据低频图像的分数阶微分显著性检测结果构建显著性约束项,通过高频子带的系数相关性构建边界约束项,然后利用最大流/最小割算法求解能量函数的最小值实现图像分割,得到的结果与实际目标吻合度高。
[0136]
改进surf算法匹配效果
[0137]
为验证本发明改进surf算法匹配效果,对相邻两帧泡沫红外图像i
t
和i
t+1
进行特征点检测及匹配实验,并与改进sift算法、改进surf算法的匹配结果比较。实验过程及结果如图7所示,图7(c)、(d)分别为i
t
和i
t+1
的特征点检测结果,图7(g)为相应的特征点匹配结果,匹配点对最多且分布均匀,无误匹配点出现;图7(e)为改进sift的特征点匹配结果,匹配点多且分布较均匀;图7(f)为改进surf的特征点匹配结果,匹配点对较少且簇集,匹配点分布不均匀。为进一步客观验证匹配算法的性能,分别对100对叠加均值0、不同方差的高斯白噪声图像和100对不同尺度比例的图像进行匹配实验,平均匹配精度和运行时间如表1所示,在噪声方差为10%、尺度比为1:2情况下:改进的sift较原sift的运算时间少了一半,抗噪声和尺度变换性能较好,平均匹配精度较高,但是运算效率有待进一步提高;改进surf算法的抗噪声和尺度变换性大大提升,而且保持较高的运算效率,但是匹配点簇集且分布不均匀;本发明改进surf算法的抗噪声和尺度变换能力大大提升,抗噪声性能最优,抗尺度变换性能与改进sift相当,但是运算效率高于改进的sift算法。当噪声方差增加到30%、尺度比增大到1:8情况下:三种算法的匹配性能都大幅度下降,但是本发明保持高于85%的匹配精度,具有较优的抗噪声和尺度变换能力。
[0138]
表1匹配精度及运行时间比较
[0139]
[0140]
流速检测性能及比较
[0141]
为验证本发明流速检测效果,对相邻两帧泡沫红外图像i
t
和i
t+1
进行特征点匹配及流速检测实验,并与现有的方法进行比较分析,实验结果如图8所示:用相邻领域匹配块搜索法对泡沫进行流动特征提取和计算的匹配结果和速度矢量图如图8(e)所示,速度矢量图上的带箭头线段代表各个特征点的速度矢量,该方法匹配速度快,但易受外界光照因素影响,出现误匹配,流速检测精度低;像素点跟踪技术法的像素跟踪结果和速度矢量图如图8(f)所示,匹配结果错误率较低,但是匹配点对少、特征点分布不均匀;sift匹配法的匹配结果和速度矢量图如图8(g)所示,检测范围广且分布均匀、匹配点对较多,但sift运算效率低;改进orb匹配法的匹配结果和速度矢量图如图8(h)所示,匹配点多且分布均匀,但是受气泡破碎、合并的影响,在破碎、合并区域的速度大小、方向产生一定偏差,影响了整体的流速检测精度;本发明的实验结果如图8(i)所示,匹配点对多且分布较为均匀,对分割红外目标的背景区域进行特征点检测及匹配,有效去除了气泡破碎、合并的影响,提取的流速是泡沫整体的速度大小与方向,检测精度高。
[0142]
为进一步客观验证本发明方法流速检测精度,选取实际位移为(15,15)的两帧256
×
256的图像i
t
和i
t+1
进行仿真实验,并计算泡沫流速的大小v、方向θv、以及相对误差ev、e
θ
和运行时间,并与现有方法进行比较分析,结果数据统计如表2所示:sift匹配法、改进orb匹配法和本发明的ev、e
θ
较小,具有较高的检测精度,但是sift匹配法的运算效率低,而改进orb匹配法在实际应用中受气泡破碎、合并的干扰,影响了整体检测精度,本发明可有效去除了气泡破碎、合并的影响,进一步提高了检测精度。
[0143]
表2流速检测结果及比较
[0144]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1