一种图像采集的调度方法、装置、设备及存储介质与流程
本技术涉及图像采集技术,尤其涉及一种图像采集的调度方法、装置、设备及存储介质。
背景技术:
1、图像采集设备能够针对拍摄空间中的对象进行拍摄,得到能够用于后续图像处理的图像。然而,后续的图像处理的可靠程度和处理效率(图像质量不佳可能会导致更长的识别时间),有赖于图像采集设备的所采集到的图像的质量。然而,相关技术中,图像采集设备所采集到的图像的质量较低,从而导致图像采集的效果较差。
技术实现思路
1、本技术实施例提供一种图像采集的调度方法、装置、设备、计算机可读存储介质及计算机程序产品,能够提升图像采集的效果。
2、本技术实施例的技术方案是这样实现的:
3、本技术实施例提供一种图像采集的调度方法,包括:
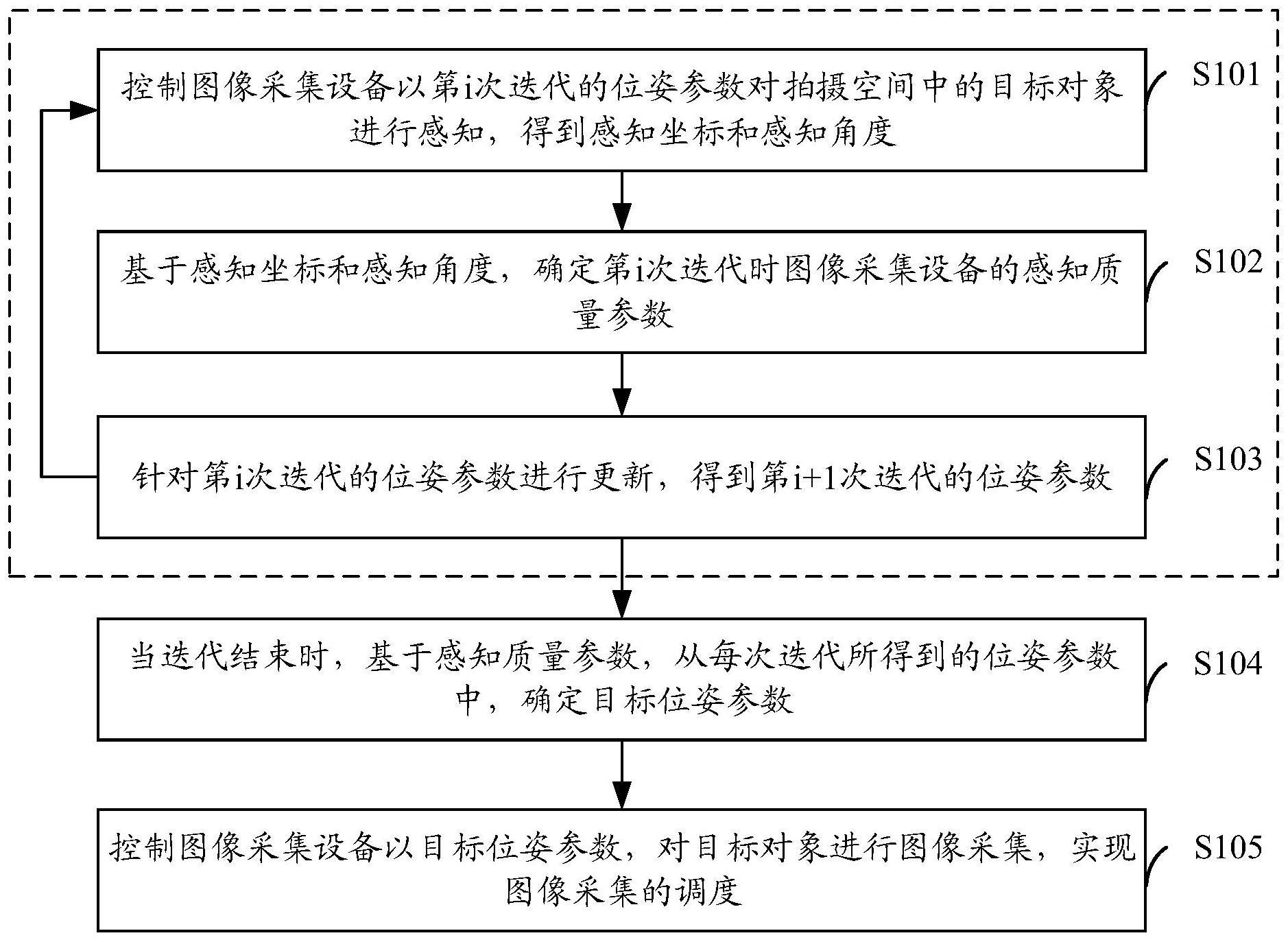
4、控制图像采集设备以第i次迭代的位姿参数对拍摄空间中的目标对象进行感知,得到感知坐标和感知角度;其中,i为正整数,第1次迭代的位姿参数通过参数初始化处理得到;
5、基于所述感知坐标和所述感知角度,确定第i次迭代时所述图像采集设备的感知质量参数;
6、针对第i次迭代的位姿参数进行更新,得到第i+1次迭代的位姿参数;
7、当迭代结束时,基于所述感知质量参数,从每次迭代所得到的位姿参数中,确定目标位姿参数;
8、控制所述图像采集设备以所述目标位姿参数,对所述目标对象进行图像采集,实现图像采集的调度。
9、本技术实施例提供一种图像采集的调度装置,包括:
10、感知控制模块,用于控制图像采集设备以第i次迭代的位姿参数对拍摄空间中的目标对象进行感知,得到感知坐标和感知角度;其中,i为正整数,第1次迭代的位姿参数通过参数初始化处理得到;
11、质量确定模块,用于基于所述感知坐标和所述感知角度,确定第i次迭代时所述图像采集设备的感知质量参数;
12、参数更新模块,用于针对第i次迭代的位姿参数进行更新,得到第i+1次迭代的位姿参数;
13、参数确定模块,用于当迭代结束时,基于所述感知质量参数,从每次迭代所得到的位姿参数中,确定目标位姿参数;
14、位姿控制模块,用于控制所述图像采集设备以所述目标位姿参数,对所述目标对象进行图像采集,实现图像采集的调度。
15、在本技术的一些实施例中,所述质量确定模块,还用于基于所述感知坐标和所述感知角度,计算得到所述图像采集设备的视角质量参数;所述视角质量参数表征所述图像采集设备与所述目标对象之间的视角对成像所造成的影响;基于所述感知坐标和所述感知角度,计算得到所述图像采集设备的畸变质量参数;所述畸变质量参数表征图像畸变对感知质量所造成的影响;对所述视角质量参数和所述畸变质量参数进行融合,得到融合结果,并基于所述融合结果,确定第i次迭代时所述图像采集设备的所述感知质量参数。
16、在本技术的一些实施例中,所述感知角度包括:所述目标对象与所述图像采集设备的光轴的第一夹角;所述质量确定模块,还用于利用所述图像采集设备的设备坐标和所述感知坐标,构建感知向量;所述感知向量表征从所述设备坐标指向所述感知坐标的向量;基于所述感知向量、所述第一夹角和所述图像采集设备的视角信息,计算得到视角参数;针对所述视角参数以及所述图像采集设备的径向像素数量进行比例计算,得到所述图像采集设备的所述视角质量参数。
17、在本技术的一些实施例中,所述感知角度包括:所述目标对象与所述图像采集设备的光轴的第一夹角,所述目标对象与所述图像采集设备的设备平面的第一方向轴的第二夹角;
18、所述质量确定模块,还用于基于所述第一夹角、所述第二夹角和所述图像采集设备的视角信息,计算与所述感知坐标相对应的校正坐标;所述校正坐标是所述感知坐标经过畸变校正后的映射;利用所述校正坐标和所述感知坐标,计算得到所述图像采集设备的所述畸变质量参数。
19、在本技术的一些实施例中,所述图像采集设备包括:多个相机设备,所述融合结果包括:多个所述相机设备对应的多个子融合结果;所述质量确定模块,还用于基于每个所述相机设备的可见信息,针对每个所述相机设备生成可见参数;其中,所述可见信息表征所述目标对象在所述相机设备的视野范围的出现情况;依据每个所述相机设备的可见参数,以及每个所述相机设备对应的所述子融合结果,生成每个所述相机设备的子质量参数;利用多个所述相机设备的子质量参数,确定第i次迭代时所述图像采集设备的所述感知质量参数。
20、在本技术的一些实施例中,所述参数确定模块,还用于从每次迭代时所述图像采集设备的感知质量参数中,筛选得到最小感知质量参数;从每次迭代所得到的位姿参数中,将与所述最小感知质量参数相对应的位姿参数,确定为所述目标位姿参数。
21、在本技术的一些实施例中,所述图像采集设备包括:多个相机设备;所述参数确定模块,还用于从每次迭代时多个所述相机设备的所对应的多个子融合结果中,筛选得到每次迭代的最小子融合结果;从每次迭代时的感知质量参数中,对小于对应的所述最小子融合结果的感知质量参数进行筛选,得到多个候选最小参数;对多个所述候选最小参数的最小值进行筛选,得到所述最小感知质量参数。
22、在本技术的一些实施例中,所述参数确定模块,还用于获取第i次迭代的中间参数;其中,第i次迭代的中间参数至少基于第i-1次迭代的中间参数、辅助参数、所述最小子融合结果和第i-1次迭代的位姿参数计算得到,所述辅助参数至少包括:学习因子、惯性权重和随机数;利用第i次迭代的中间参数,对第i次迭代的位姿参数进行更新,得到第i+1次迭代的位姿参数。
23、在本技术的一些实施例中,所述位姿参数至少包括:每个所述相机设备的俯仰角度和旋转角度。
24、在本技术的一些实施例中,所述图像采集设备包括:多个相机设备,所述目标位姿参数包括:每个所述相机设备的目标俯仰角度和目标旋转角度;
25、所述位姿控制模块,还用于控制每个所述相机设备以所述目标俯仰角度和所述目标旋转角度,对所述目标对象进行图像采集,得到每个所述相机设备所对应的图像信息。
26、在本技术的一些实施例中,所述图像采集的调度装置还包括:图像处理模块,用于针对每个所述相机设备的所对应的图像信息进行目标对象的定位处理,得到每个所述相机设备所对应的定位信息;针对多个所述相机设备的定位信息进行融合,得到所述目标对象的目标位置。
27、本技术实施例提供一种电子设备,包括:
28、存储器,用于存储可执行指令;
29、处理器,用于执行所述存储器中存储的可执行指令时,实现本技术实施例提供的图像采集的调度方法。
30、本技术实施例提供一种计算机可读存储介质,存储有可执行指令,用于引起处理器执行时,实现本技术实施例提供的图像采集的调度方法。
31、本技术实施例提供一种计算机程序产品,包括计算机程序或计算机可执行指令,所述计算机程序或计算机可执行指令被处理器执行时实现本技术实施例提供的图像采集的调度方法。
32、本技术实施例具有以下有益效果:电子设备会在每次迭代时,先感知得到目标对象的感知坐标和感知角度,基于感知坐标和感知角度对图像采集设备的感知质量进行评估,得到感知质量参数,并对位姿参数进行更新,在迭代结束之后,利用感知质量参数对所有轮次的迭代的位姿参数进行筛选,以得到较为合理的目标位姿参数,如此,能够实现依据图像采集设备针对目标对象的感知质量,动态调整图像采集设备的位姿参数,从而使得图像采集设备总是能够以最合理的目标位姿参数进行图像采集,使得采集到的图像的质量得以提高,也就提升了图像采集的效果。
- 还没有人留言评论。精彩留言会获得点赞!