曲面融合方法、装置和医疗影像设备与流程
本发明涉及医疗,尤其涉及一种曲面融合方法、装置和医疗影像设备。
背景技术:
1、口内扫描仪在扫描过程中需要边重建、边配准、边融合,且把融合后的曲面实时显示出来。常规方法需要先配准融合再生成曲面,使得常规的方法要么精度达不到要求,要么速度跟不上。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提出一种曲面融合方法,可以有效地将待融合曲面和目标曲面进行融合,无需单独重新构建曲面,大大减少了计算量。
2、本发明的第二个目的在于提出一种曲面融合装置。
3、本发明的第三个目的在于提出一种医疗影像设备。
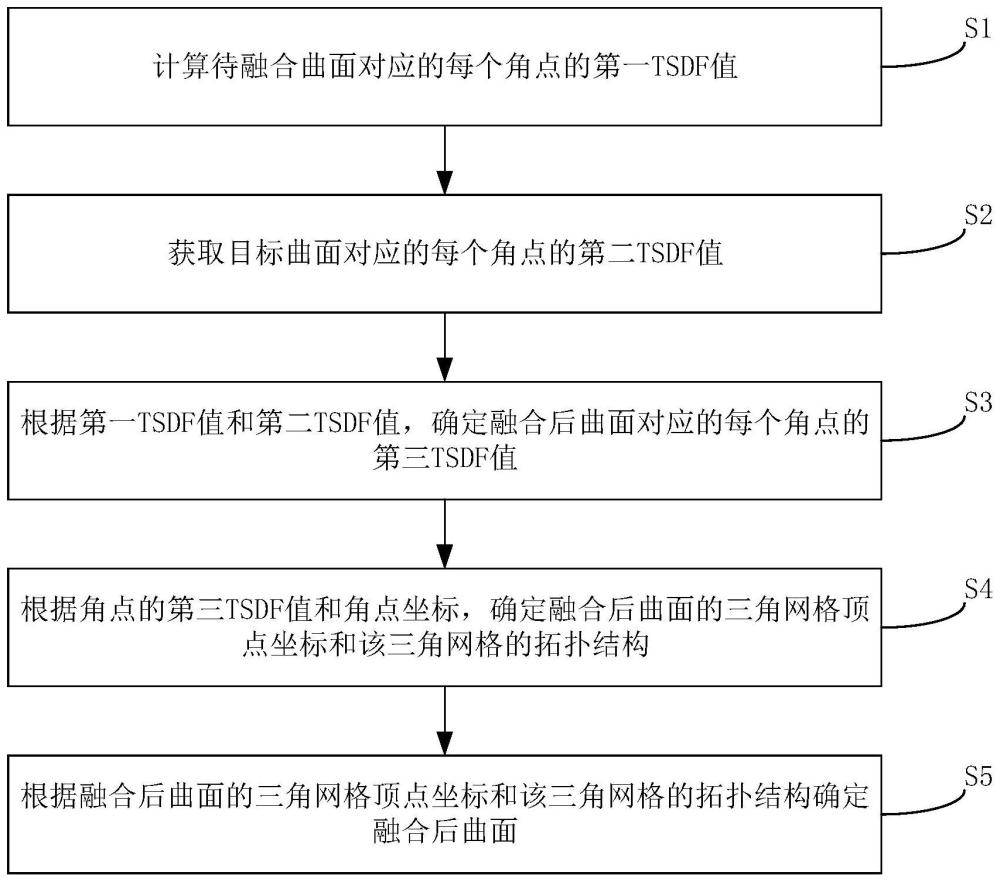
4、为达到上述目的,本发明第一方面实施例提出了一种曲面融合方法,所述方法包括:计算待融合曲面对应的每个角点的第一tsdf值;获取目标曲面对应的每个角点的第二tsdf 值;根据所述第一tsdf值和所述第二tsdf值,确定融合后曲面对应的每个角点的第三tsdf 值;根据角点的第三tsdf值和角点坐标,确定所述融合后曲面的三角网格顶点坐标和该三角网格的拓扑结构;根据所述融合后曲面的三角网格顶点坐标和该三角网格的拓扑结构确定所述融合后曲面。
5、另外,本发明上述实施例提出的曲面融合方法还可以具有如下附加的技术特征:
6、根据本发明的一个实施例,计算待融合曲面对应的每个角点的第一tsdf值,包括:确定所述待融合曲面的包络网格组,并针对所述包络网格组中的每个角点,计算该角点到所述待融合曲面上所有三角网格的最小距离;将所述最小距离作为所述待融合曲面对应的每个角点的第一tsdf值中的tsdf距离。
7、根据本发明的一个实施例,确定所述待融合曲面的包络网格组,并针对所述包络网格组中的每个角点,计算该角点到所述待融合曲面上所有三角网格的最小距离,包括:针对所述待融合曲面的所有三角网格,确定包络所有三角网格的包络网格组,记为第一包络网格组,所述第一包络网格组即为所述待融合曲面的包络网格组;针对所述第一包络网格组中每个立方体的每个角点,确定该角点到所述待融合曲面上所有三角网格的投影点,并计算该角点到其各投影点的第一距离;将每个角点的第一距离中的最小值作为该角点到所述待融合曲面上所有三角网格的最小距离;
8、或,针对所述待融合曲面上的每个三角网格,确定包络该三角网格的包络网格组,记为第二包络网格组,所有第二包络网格组即组成所述待融合曲面的包络网格组;针对每个第二包络网格组中每个立方体的每个角点,确定该角点到对应三角网格的投影点,并计算该角点到其各投影点的第一距离;将同一角点对应的第一距离中的最小值作为对应角点到所述待融合曲面上所有三角网格的最小距离;其中,用于计算所述第一距离的投影点为落入相应三角网格内的投影点。
9、根据本发明的一个实施例,确定投影点的方式包括下述方式中的至少一者:方式一:针对每个角点,采用重心法和垂直向量法得到该角点到所述待融合曲面上所有三角网格的投影点;方式二:针对所述待融合曲面对应的每个网格,确定该网格相对面的中心连线与所述待融合曲面上相应三角网格的交点,并将该交点作为该网格8个角点到所述相应三角网格的投影点;方式三:针对所述待融合曲面上每个三角网格,确定该三角网格的包络网格组的网格面与该三角网格的交点,并将交点作为该三角网格的包络网格组中各网格的8个角点到该三角网格的投影点。
10、根据本发明的一个实施例,当存在到所述待融合曲面上所有三角网格均没有投影点的角点时,将该角点相邻角点的投影点作为该角点的投影点。
11、根据本发明的一个实施例,根据所述第一tsdf值和所述第二tsdf值,确定融合后曲面对应的每个角点的第三tsdf值,包括:确定所述目标曲面的包络网格组,记为第三包络网格组,并记所述待融合曲面的包络网格组为第四包络网格组;针对所述第三包络网格组和所述第四包络网格组的公共部分的每个角点,根据该角点的第一tsdf值中的tsdf距离、第二tsdf值中的tsdf距离和tsdf权重得到该角点的第三tsdf值中的tsdf距离,并根据该角点的第一tsdf值中的tsdf距离和tsdf权重得到该角点的第三tsdf值中的tsdf权重;针对所述第四包络网格组相对所述第三包络网格组的新增部分的每个角点,将该角点的第一tsdf值作为该角点的第三tsdf值中的tsdf距离,并得到该角点的第三tsdf值中的tsdf 权重为预设值。
12、根据本发明的一个实施例,根据第一tsdf值中的tsdf距离和tsdf权重得到第三tsdf 值中的tsdf权重,包括:在第一tsdf值中的tsdf距离小于预设截断距离时,根据第二tsdf值中的tsdf权重得到第三tsdf值中的tsdf权重;在第一tsdf值中的tsdf距离大于或等于所述预设截断距离时,将第二tsdf值中的tsdf权重作为第三tsdf值中的tsdf 权重。
13、根据本发明的一个实施例,根据第一tsdf值中的tsdf距离、第二tsdf值中的tsdf距离和tsdf权重得到第三tsdf值中的tsdf距离,包括:计算所述第二tsdf值中的tsdf 距离和tsdf权重的乘积,得到第一乘积;计算所述第一tsdf值中的tsdf距离与tsdf的单位阈值的乘积,得到第二乘积;计算所述第一乘积与所述第二乘积的加和,得到第一和值;计算所述第二tsdf值中的tsdf权重与所述单位阈值的加和,得到第二和值;计算所述第一和值与所述第二和值的比值,得到所述第三tsdf值中的tsdf距离;其中,根据第二tsdf值中的tsdf权重得到第三tsdf值中的tsdf权重,包括:将所述第二和值作为所述第三tsdf值中的tsdf权重。
14、根据本发明的一个实施例,根据角点的第三tsdf值和角点坐标,确定所述融合后曲面的三角网格顶点坐标和该三角网格的拓扑结构,包括:根据所述角点坐标和所述第三tsdf 值中的tsdf距离,确定所述融合后曲面的三角网格顶点坐标;根据所述第三tsdf值中的 tsdf距离确定立方体网格对应的nmc值,根据nmc值和三角网格的顶点坐标,确定所述融合后曲面的三角网格的拓扑结构。
15、本发明实施例的曲面融合方法,通过tsdf算法计算待融合曲面的第一tsdf值,获取已融合的曲面的第二tsdf值,根据第一tsdf值和第二tsdf值,计算融合后曲面对应的每个角点的第三tsdf值。用角点位置代替体素位置,较少了曲面融合的计算量。且根据第三tsdf值和角点坐标,确定融合后曲面的三角网格顶点坐标和该三角网格的拓扑结构,从而确定了融合后曲面。曲面融合计算的过程就是确定融合后曲面的三角网格顶点及三角网格拓扑结构的过程,相当于将曲面融合和曲面重建合并,无需单独重新构建曲面,大大减小计算量。
16、为达到上述目的,本发明第二方面实施例提出了一种曲面融合装置,包括存储器、处理器以及存储在存储器上的计算机程序,计算机程序被处理器执行时,实现如上述的曲面融合方法。
17、为达到上述目的,本发明第三方面实施例提出了一种医疗影像设备,包括如上述的曲面融合装置。
18、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!