一种三维影像下的示踪球定位方法与流程
1.本发明涉及图像处理领域,尤其涉及一种三维影像下的示踪球定位方法。
背景技术:
2.肺癌是对人生命和健康危险最大的癌症之一,肺部活检是肺部肿瘤诊断的金标准。肺部活检手术需要具有丰富临床经验的医生取出病灶进行病理分析。手术导航系统主要原理就是术前的ct影像空间坐标系和术中的人体空间坐标系进行配准,从而实现将手术器械实时显示在术前的ct影像坐标空间。
3.申请号为cn202111181190.8,发明名称为标记球定位方法及其应用的专利提供了一种标记球定位方法,但是其标记球是需要在三维影中全局搜索,因而十分耗时,同时标记球定位只使用到一个阈值,会存在误配准现象。
技术实现要素:
4.发明目的:针对上述不足,本发明提出一种三维影像下的示踪球定位方法,可以减少标记物定位时间,提高配准精度,减少误配准。
5.技术方案:
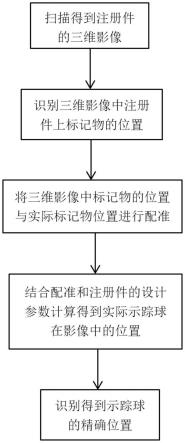
6.一种三维影像下的示踪球定位方法,包括步骤:
7.扫描得到其上安装有标记物和示踪球的注册件的三维影像;
8.识别得到三维影像中标记物位置,将其与实际标记物位置进行配准,并根据注册件的设计参数计算得到实际示踪球在影像中的位置,据此识别得到示踪球的精确位置。
9.通过阈值筛选识别得到三维影像中标记物位置。
10.所述阈值筛选具体为:
11.对三维影像中各体素点的ct值进行直方图统计;
12.根据标记物所占体素点数量确定直方图上最佳组索引,从而计算得到标记物的筛选阈值,并据此筛选得到对应的体素点;
13.通过聚类得到各候选标记物,并遍历选取其中与注册件上标记物对应数量的候选标记物与注册件上标记物进行相对位置关系匹配,若匹配则将其作为候选标记物组合;
14.将候选标记物组合与注册件上标记物组合进行配准,选取配准误差最小的候选标记物组合作为最终标记物组合,从而识别得到三维影像中标记物位置。
15.所述配准误差具体为二者的均方根误差。
16.所述在前述区域中识别得到示踪球的精确位置具体为:依次进行圆检测、圆筛选、圆聚类、求质心、示踪球组合匹配和配准进行示踪球定位。
17.所述圆检测具体为:
18.根据实际示踪球在影像中的位置及示踪球半径计算各示踪球在三维影像的感兴趣区域;
19.遍历三维影像上示踪球的感兴趣区域对应的每一个切面图像的平面感兴趣区域;
20.在平面感兴趣区域上使用霍夫变换进行圆检测。
21.所述圆筛选具体为:
22.在检测到的某一平面圆的边上设置四个设定宽度与长度的矩形区域,分别位于左边界,右边界,上边界,下边界,分别判断各矩形区域内像素值小于固定阈值的像素点占对应整个矩形区域所有像素点的比例;若比例大于设定背景阈值,则该矩形区域是背景,否则为前景;
23.若至少有两个矩形区域是背景,则认为该平面圆为示踪球在切片上的平面圆。
24.所述矩形区域的宽度和长度具体为:
25.所述矩形区域的宽度长度为2*(平面圆半径+pad);
26.其中,s.x、s.y表示平面圆所在平面上的像素点在对应平面坐标系的x轴和y轴上的长度。
27.所述示踪球组合匹配具体为:
28.遍历选取其中与注册件上实际示踪器对应数量的示踪球组合进行相对位置关系匹配,若匹配,则将其作为候选示踪球组合。
29.所述示踪球组合配准具体为:
30.将示踪球组合匹配得到的候选示踪球组合与注册件上实际示踪球组合进行配准,选取配准误差最小的候选示踪球组合作为最终示踪球组合。
31.还包括进一步定位步骤:
32.根据示踪球定位得到的质心的坐标和示踪球半径得到在冠状面和矢状面上各示踪球质心所在切面和其前后二个切面的感兴趣区域,求取各示踪球在各切面上的外轮廓,再对其外轮廓点进行拟合,计算得到新的示踪球质心,并重新计算配准误差,若更新后的配准误差小于之前的配准误差,则更新该示踪球的位置。
33.所述识别得到示踪球的精确位置还包括:
34.设置初始窗位和最终窗位,设置由初始窗位至最终窗位的调整步长,设置固定窗宽,进行窗位窗宽调整得到不同的窗位和窗宽的图像,并识别得到示踪球的精确位置;
35.若识别得到相应的示踪球,则更新计算配准误差,若此配准误差小于之前的配准误差,则更新示踪球组合及对应示踪球质心。
36.更新示踪球组合后,判断窗位窗宽调整后检测到相应示踪球的次数占所有调整次数的比例是否大于设定比例,若大于,则更新得到的示踪球组合作为最终示踪球组合,否则重新进行窗位窗宽调整。
37.所述设定比例为0.6。
38.所述标记物和所述示踪球均为至少三个,且均共面但不共线地安装于所述注册件上。
39.有益效果:本发明先对标记物进行粗定位,利用标记物和示踪球的先验关系计算出示踪球在影像中的区域,然后对之前得到的示踪球在影像中的区域进行小范围局部搜索,这样就可以减少示踪球定位的时间。同时本发明通过窗位窗宽迭代调整进行精定位,提高配准精度,减少误配准。
附图说明
40.图1为本发明的示踪球定位方法的流程图;
41.图2为用于导航定位的注册件的结构示意图;
42.图3为标记物粗定位的流程示意图;
43.图4为窗位和窗宽调整后的ct图像;
44.图5为人体坐标系示意图;
45.图6为示踪球的定位流程示意图;
46.图7为圆聚类算法流程示意图。
47.其中,1为注册件,11为支架,12为标记物,13为示踪球。
具体实施方式
48.下面结合附图和具体实施例,进一步阐明本发明。
49.本发明的三维影像下的示踪球定位方法如图1所示,包括如下步骤:
50.(1)扫描用于导航定位的注册件的三维影像;
51.图2为本发明的用于导航定位的注册件的结构示意图,如图2所示,本发明的注册件1安装在人体表面靠近病灶的地方,包括支架11和安装于支架11上的标记物12及示踪球13。具体地,支架11材料采用聚醚醚酮;标记物12为至少三个且共面但不共线地安装于支架11上;更具体地,标记物12采用直径为2.5mm的钢珠,如此设计的钢珠直径很小,对ct影像所带来的伪影很小。本发明中钢珠为4个,且各个钢珠圆心共面但不共线地安装于支架11上。示踪球13采用磨砂球,ct值与人体软体组织相似,没有像金属标记物对ct影像所带来的伪影,从而不会影响医生的诊断,直径为11~13mm,为至少三个且共面但不共线地安装于支架11上;本发明中,示踪球13为4个且共面但不共线地安装于支架11上,组成示踪组件。
52.本发明采用ct设备对注册件进行扫描得到其ct影像。
53.(2)对三维影像中的标记物进行粗定位;
54.本发明,采用阈值筛选定位标记物位置,实现其粗定位,具体地,由于钢珠在ct影像中的ct值很大,这样就可以通过阈值筛选,将高ct值的体素点筛选出来,如此得到的体素点的数量就会大大减少,可以很快就能定位出钢珠的位置。但是钢珠在人体呼吸幅度很大的部位,就会存在运动伪影,这样就会影响钢珠的定位精度,因此钢珠只能作为粗定位。如图3所示,步骤如下:
55.(21)对三维影像中各体素点的ct值进行直方图统计;
56.设定直方图的组数bin,则相邻组之间ct值间隔(也即步长)为step=(z
max-z
min
)/bin,其中,z
max
、z
min
分别为三维影像中体素点ct值的最大值和最小值;
57.遍历三维影像中每一个体素点的ct值,记为zi,则通过下式计算各体素点对应的直方图的组索引di,同时该体素点对应的组内体素点个数加1,其中以下公式计算向下取整数得到di;
58.di=(z
i-z
min
)/bin;
59.本发明中,设定直方图的组数bin=1000,第一组的索引为0,故直方图的组索引为[0,999];
[0060]
(22)计算标记物的筛选阈值;
[0061]
从直方图的最大组索引至0进行遍历,记录遍历过的组内体素点数量总和n,当n大于设定阈值a0时,则确定最佳直方图的组索引为d
best
;
[0062]
设定阈值a0==k*4/3πr
13
/(s.x*s.y*s.z);
[0063]
其中,k为阈值系数,取值范围为(0,1),根据实际需求设定;r1为标记物的半径;s.x、s.y、s.z分别为体素点所占空间在影像坐标系三坐标轴上的长度;
[0064]
那么可以确定标记物的筛选阈值l=z
min
+bin*(d
best
+1);
[0065]
(23)标记物体素点筛选;
[0066]
遍历三维影像的每一个体素点,若某一体素点对应的ct值大于或等于筛选阈值l,则将该体素点在影像坐标系的三维坐标和ct值和访问状态(初始访问状态为false)放入到集合o中;
[0067]
(24)确定疑似标记物的体素点组合;
[0068]
1)随机选取集合o中某一个体素点,若该体素点的访问状态为false,则将该体素点设为种子点,并将该种子点的访问状态设置为true,放入到种子点集合a中;
[0069]
2)将当前种子点设为中心点,分别沿着影像坐标系的x、y、z轴三个方向寻找距离该点距离为1的周围邻域点,并判断对应邻域点是否在集合o中,若该点是在集合o中,则将该邻域点设置为种子点并将其访问状态设置为true,放入到集合a中,遍历集合a中的种子点并重复步骤2)查找与种子点距离为1在集合o中的周围邻域点进行聚类得到其中一疑似标记物的体素点组合,放入至集合b中,并将查到得到的领域点的访问状态设置为true;
[0070]
3)重复步骤1)~2),直至遍历完集合o中访问状态为false的所有体素点,得到的集合b即为各疑似标记物的体素点组合。
[0071]
(25)确定候选标记物;
[0072]
由于标记物的体积大小是固定的,则标记物内体素点的个数也是固定的,也即n=4/3πr
13
/(s.x*s.y*s.z),则设置标记物的体素点个数下限为n
lower
=n/10,设置标记物的体素点个数上限为n
upper
=n*10,将集合b中各疑似标记物的体素点组合中体素点个数小于n
lower
或者大于n
upper
的体素点组合删除,并更新集合b,从而得到候选标记物的体素点组合,也即得到了候选标记物。
[0073]
(26)计算各候选标记物的质心;
[0074]
遍历集合b中的每一体素点组合,计算每一个体素点组合的质心,也即得到各候选标记物的质心,具体体素点组合的质心p
t
计算如下:
[0075][0076][0077][0078]
其中,p
t
.x为该体素点组合的质心点p
t
的x坐标值,p
t
.y为质心点p
t
的y坐标值,p
t
.z为质心点p
t
的z坐标值,pj.x为该体素点组合中某一体素点pj的x坐标值,pj.y为某一体素点pj的y坐标值,pj.z为某一体素点pj的z坐标值,n为每一个体素点组合中体素点的个数。
[0079]
(27)得到候选标记物组合;
[0080]
通过步骤(26)求得各各候选标记物的质心坐标,随机选取集合b中4个候选标记物作为待匹配点集,将其相对位置关系与注册件中实际标记物构成的实际点集的相对位置关系进行一一对应,遍历得到其中与注册件中实际点集的相对位置关系偏差符合要求的待匹配点集作为候选点集,也即候选标记物组合,具体为:
[0081]
随机选取集合b中4个体素点组合(即候选标记物)作为待匹配点集,并判断待匹配点集中4个候选标记物的相对位置关系与实际点集的相对位置关系(使用三坐标测量)是否匹配;若匹配,则将该待匹配点集放入候选标记物组合的集合中,否则,重复该步骤直至遍历完集合b中所有体素点组合。
[0082]
在本发明中,也可以先随机选择一个体素点组合,然后选取与该体素点组合之间的位置关系与实际点集中四个标记物之间的相对位置关系相同的其他体素点组合组成待匹配点集,然后将其与实际点集进行匹配。
[0083]
具体地,待匹配点集的相对位置关系与实际点集的相对位置关系是否匹配采用如下三点进行判断:
[0084]
a.待匹配点集中任意两点之间的欧式距离与实际点集中对应两点之间的欧式距离之间的偏差是否小于第一阈值;
[0085]
b.待匹配点集中的任意三个点之间的两条连线之间的夹角与实际点集中对应的两条连线之间的实际夹角之间的偏差是否小于第二阈值;
[0086]
c.待匹配点集的四个点所在的平面的平面度与实际点集的四个点所在的平面的实际平面度之间的偏差是否小于第三阈值;
[0087]
当a、b、c的偏差均在对应阈值范围之内时,判定该待匹配点集与实际点集匹配,否则判定为不匹配;其中,第一、第二、第三阈值按需设置;
[0088]
(28)配准得到最终标记物组合;
[0089]
将步骤(27)计算得到的影像坐标系下候选标记物组合与设计坐标系(即标记物坐标系)下注册件中实际标记物组合构成的实际点集进行配准得到配准矩阵,具体采用各标记物的质心进行配准,求取投影误差最小的候选标记物组合作为影像坐标系下的标记物组合;
[0090]
配准采用刚体配准方法(常用方法svd分解),误差评价标准指标是将影像坐标系下的候选标记物组合转换到设计坐标系下,求取其与注册件中实际标记物组合之间的均方根误差rmse,将其作为配准的投影误差;
[0091]
转换公式:p2=r*p1+t,r为影像坐标系与设计坐标系之间的旋转变换,t为对应的平移变换;
[0092]
均方根误差为:
[0093]
p1为影像坐标系下候选标记物的质心坐标,p2为影像坐标系的候选标记物转换到设计坐标系下的质心坐标,p3为设计坐标系下的实际标记物的质心坐标,k表示第k个候选标记物的质心。
[0094]
(3)确定示踪球在三维影像中的区域;
[0095]
根据步骤(2)得到标记物坐标系与三维影像坐标系之间的变换关系t
img1
,通过三坐标测量仪测量得到注册件实际的标记物质心和示踪球质心,从而得到标记物坐标系与世
界坐标系之间的变换关系t
w1
,示踪球坐标系与世界坐标系之间的变换关系t
w2
,从而计算得到标记物坐标系与示踪球坐标系之间的变换关系:t
12
=t
w1
*t
w2-1
;最后求得示踪球坐标系与影像坐标系之间的变换关系t
img2
=t
img1
*t
12
:
[0096]
由此得到实际示踪球质心在影像坐标系的坐标,从而结合示踪球的实际半径可以确定示踪球在三维影像中的区域,但是由于人的呼吸所带来的运动伪影,示踪球的位置不是很精确,因而需要精确定位。
[0097]
(4)示踪球粗定位;
[0098]
通过圆检测、圆筛选、圆聚类、求质心、示踪球组合匹配和配准进行示踪球定位;
[0099]
因为标记物是球体,沿着平行于球体的横断面(图5的xy面),球体在每一个切片中都是平面圆,且每个圆的圆心坐标都是相同的,只要在所有切面圆中检测出一半以上的平面圆的圆心,多个圆心连成一条直线,那么直线的中点即为质心,就能定位出标记物的质心,保证了粗定位算法的稳健,重复以上步骤,求得所有疑似球体的质心。
[0100]
算法流程如图6所示,具体如下:
[0101]
(41)三维影像窗位和窗宽的调整;
[0102]
确定窗位和窗宽,由于示踪球的窗位和窗宽比较固定,因而确定示踪球的窗位为-100,窗宽为400,对含有标记物的原始三维影像,先将其转成hu值,再进行窗位窗宽调整,将数据归一化到[0,255]区间,如图4所示,如下:
[0103]
pv=(h
v-h
min
)*255/(h
max-h
min
)
[0104]hmin
=(2*w
l-ww)/2+0.5
[0105]hmax
=(2*w
l
+ww)/2+0.5
[0106]
其中,pv表示原始ct图像上某一像素点归一化后的灰度值,hv表示hu值,h
min
表示原始ct图像hu值的最小值,h
max
表示原始ct图像hu值的最大值,w
l
表示窗位,ww表示窗宽;h
min
和h
max
的最终值为实际计算出来的值往上取整数。
[0107]
(42)平面圆检测;
[0108]
根据步骤(3)得到实际示踪球质心在影像坐标系的坐标,即为q(x,y,z),确定各示踪球在三维影像的感兴趣区域(roi),计算方法为:
[0109]
roi.x=q.x-2*r2;
[0110]
roi.y=q.y-2*r2;
[0111]
roi.z=q.z-2*r2;
[0112]
roi.width=2*r2;
[0113]
roi.height=2*r2;
[0114]
roi.depth=2*r2;
[0115]
其中,roi.x、roi.y、roi.z分别为感兴趣区域在x、y、z方向上的起始点坐标,q.x、q.y、q.z分别为示踪球质心在影像坐标系的x轴、y轴、z轴上的坐标,r2为示踪球的半径,roi.width、roi.height、roi.depth分别为示踪球在三维影像的感兴趣区域roi在影像坐标系中的宽度、高度、深度;
[0116]
遍历三维影像上示踪球的roi区域对应的横断面(如图4)的每一个切面图像的平面感兴趣区域p
roi
,具体如下:
[0117]
p
roi
.x=roi.x/s.x;
[0118]
p
roi
.y=roi.y/s.y;
[0119]
p
roi
.width=roi.width/s.x;
[0120]
p
roi
.height=roi.height/s.y;
[0121]
其中,p
roi
.x、p
roi
.y分别为示踪球质心在影像坐标系的x轴、y轴上的坐标,p
roi
.width为示踪球对应的平面感兴趣区域p
roi
在横断面切片上对应的二维坐标系的x轴上的长度,p
roi
.height为示踪球对应的平面感兴趣区域p
roi
在横断面切片上对应的二维坐标系的y轴上的长度;
[0122]
在p
roi
使用霍夫变换检测二维图像中的圆,本发明相比较背景技术中提到的专利中在所有横断面的切片全局搜索检测圆,检测圆的时间可以大大减少。
[0123]
(43)平面圆筛选;
[0124]
若背景平面圆太多,会导致后续示踪球组合太多,导致示踪球组合效率低,因而需要滤除掉一些不满足要求的平面圆,滤除规则就是在检测到的某一平面圆的边上设置四个矩形区域,分别位于左边界,右边界,上边界,下边界,分别判断四个矩形区域内像素值小于固定阈值的像素点占整个矩形区域所有像素点的比例,若比例大于设定背景阈值,则该矩形区域是背景,否则为前景;本发明中,固定阈值为30,背景阈值为0.6;四个矩形区域若至少有个2个矩形区域是背景,则认为这个平面圆为示踪球在切片上的平面圆;
[0125]
在本发明中,矩形区域的设定具体为以平面圆的上下左右边界上分别设置一设定宽度和设定长度的矩形区域,具体为:
[0126]
在平面圆所在平面上以水平向右方向为x轴正向,以竖直向下方向为y轴正向;设定宽度设定长度为2*(c.r+pad),其中,s.x、s.y分别为体素点所占空间在影像坐标系的x轴和y轴上的长度,体现在平面坐标系上即为像素点在平面坐标系的x轴和y轴上的长度;
[0127]
则平面圆左边界的矩形区域以其起始点向右下扩展得到,如下:
[0128]
l
roi
.x=c.x-c.r-pad
[0129]
l
roi
.y=c.y-c.r-pad
[0130]
l
roi
.width=pad
[0131]
l
roi
.height=2*(c.r+pad)
[0132]
其中,c.x、c.y为平面圆圆心在平面坐标系的x轴、y轴上的坐标,c.r为平面圆的半径,l
roi
.x、l
roi
.y分别为平面圆左边界的矩形区域的起始点在平面坐标系的x轴、y轴上的坐标,l
roi
.width、l
roi
.height分别为平面圆左边界的矩形区域的宽度和长度;
[0133]
平面圆右边界的矩形区域以其起始点向右下扩展得到,如下:
[0134]rroi
.x=c.x+c.r
[0135]rroi
.y=c.y-c.r-pad
[0136]rroi
.width=pad
[0137]rroi
.height=2*(c.r+pad)
[0138]
其中,r
roi
.x、r
roi
.y分别为平面圆右边界的矩形区域的起始点在平面坐标系的x轴、y轴上的坐标,r
roi
.width、r
roi
.height分别为平面圆右边界的矩形区域的宽度和长度;
[0139]
平面圆上边界的矩形区域以其起始点向右下扩展得到,如下:
[0140]uroi
.x=c.x-c.r-pad
[0141]uroi
.y=c.y-c.r-pad
[0142]uroi
.width=2*(c.r+pad)
[0143]uroi
.height=pad
[0144]
其中,u
roi
.x、u
roi
.y分别为平面圆上边界的矩形区域的起始点在平面坐标系的x轴、y轴上的坐标,u
roi
.height、u
roi
.width分别为平面圆上边界的矩形区域的宽度和长度;
[0145]
平面圆下边界的矩形区域以其起始点向右下扩展得到,如下:
[0146]droi
.x=c.x-c.r-pad
[0147]droi
.y=c.y+c.r
[0148]droi
.width=2*(c.r+pad)
[0149]droi
.height=pad
[0150]
其中,d
roi
.x、d
roi
.y分别为平面圆下边界的矩形区域的起始点在平面坐标系的x轴、y轴上的坐标,d
roi
.height、d
roi
.width分别为平面圆下边界的矩形区域的宽度和长度;。
[0151]
(44)圆聚类;
[0152]
利用同一个球体在横断面每一个切面的平面圆的圆心在平行于该切面的二维坐标系的坐标理论上是相同的性质,对步骤(43)得到的平面圆进行聚类,如图7所示,具体圆聚类过程如下:
[0153]
将所有平面圆的访问状态设置为false,并将其中某一个平面圆设为种子圆,将该种子圆的圆心和半径用向量b表示,并将平面圆的访问状态设置为true,遍历检测其他圆,计算检测到圆的圆心与种子圆的圆心之间的欧氏距离,若该欧式距离小于设定阈值6mm,将该圆的圆心和半径用向量a表示,并将该圆的访问状态设置为true,并将其与该种子圆归为一类,直至该种子圆遍历完所有圆后,最终将所有向量为b的圆和向量为a的种子圆聚在一起得到某一疑似示踪球在平行于横断面的所有切面内的圆的组合;再遍历访问状态为false的平面圆,选取一个圆作为种子圆,重复上述聚类过程,得到所有疑似示踪球的圆组合;
[0154]
(45)求取疑似示踪球的质心和半径;
[0155]
根据步骤(44)聚类得到的每一个疑似示踪球的圆组合中所有圆的圆心在平行于横断面的同一个二维坐标系下的坐标满足高斯分布,μ是所有样本的平均值,σ是所有样本的标准差,正态分布n~n(μ,σ)的置信区间是[μ-λσ,μ+λσ],其中λ根据置信水平而定,本发明中λ等于3;
[0156]
求得某示踪球的质心的x、y坐标为置信区间内样本的平均值,z坐标为圆聚类得到的每个圆组合的z坐标中值,示踪球的半径则为其对应圆组合内所有圆中的最大半径。
[0157]
(46)采用步骤(27)的方法计算得到候选示踪球组合;
[0158]
(47)采用步骤(28)的方法计算得到最终示踪球组合,从而计算得到各示踪球质心在影像坐标系的三维坐标和各示踪球对应的坐标系相对于影像坐标系的变换关系;
[0159]
(48)对示踪球的进一步定位;
[0160]
由于ct扫描层过厚示踪球就会出现扫描不全,同时示踪球在横断面的初始切面和结束切面的平面圆极有可能出现检测不到的情况,这样就会影响示踪球的质心在横断面的精确定位。示踪球在冠状面和矢状面的切片图像也是圆(冠状面就是图4的xz面,矢状面就
是图4的yz面),因此可以定位示踪球质心在横断面上的精确坐标。根据步骤(4)得到的各示踪球的质心的三维坐标和半径,从而得到在冠状面和矢状面上各示踪球质心所在切面和其前后二个切面的感兴趣区域(roi),求取各示踪球在各切面上的外轮廓,再对其外轮廓点进行拟合,计算得到新的示踪球质心,并返回步骤(47)重新进行配准,更新投影误差,若更新后的投影误差小于之前的投影误差,则更新该示踪球的三维坐标;
[0161]
其中,拟合方法为:
[0162]
a.根据前述得到的示踪球质心坐标,得到示踪球在当前切面的二维圆心o坐标,以示踪球的半径定义一个理想圆;去除离该切面上距离理想圆外轮廓大于设定阈值(本发明中,该设定阈值设为6mm)的点;
[0163]
b.分别对剩余的外轮廓点进行最小二乘圆拟合求得剩余的外轮廓点的圆心,求得三个切面中距离圆心o的欧式距离最小的圆心作为新的圆心,以其作为新的示踪球质心。
[0164]
(5)示踪球的精定位
[0165]
由于步骤(41)使用窗位窗宽调整对示踪球所在区域进行粗定位,因而会出现示踪球定位不是最佳的,从而导致示踪球的定位精度没有达到最佳,因此本发明对窗位窗宽的迭代调整,并在每次调整后通过步骤(4)进行迭代处理得到最终的各示踪球,具体如下:
[0166]
(51)因此本发明将初始窗位设为-200,最终窗位设为30,由初始窗位至最终窗位的调整步长为4,窗宽固定为400进行窗位窗宽调整,得到不同的窗位和窗宽的图像;
[0167]
(52)设置u1为迭代的次数,初始值为0;u2为没有检测到示踪球的次数,初始值为0;每进行一次窗位窗宽调整,u1加1,并重复步骤(41)~(48);若此次窗位窗宽调整没有得到满足要求的示踪球(即窗位窗宽调整后的图像中没有检测到四个示踪球),则u2加1;若得到满足要求的示踪球,则按照步骤(4)的方法计算得到新的四个示踪球的质心,并计算其对应的与注册件中实际标记物组合之间配准的投影误差,若此配准的投影误差小于步骤(2)配准得到的投影误差,则更新示踪球组合及各示踪球质心和配准矩阵,从而提高了标记球的定位精度。遍历结束后,只有满足检测到示踪球的比例rate=(u
1-u2)/u1》0.6,才会认为该示踪球组合为最终的示踪球组合,从而减少误配准现象。
[0168]
本发明先对四个标记物进行粗定位,利用标记物和示踪球的先验关系计算出示踪球在影像中的区域,然后对之前得到的示踪球在影像中的区域进行小范围局部搜索,这样就可以减少示踪球定位的时间。同时本发明通过窗位窗宽迭代调整进行精定位,这样可以提高配准精度,减少误配准。
[0169]
以上详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1