一种基于中频域维纳滤波的非视域成像方法
1.本发明属于光电成像领域,具体涉及一种基于中频域维纳滤波的非视域成像方法。
背景技术:
2.非视域成像(non-line-of-sight,nlos)是对视线外的隐藏物体进行光学探测和可视化的新兴技术,类似于“视线拐弯”或“隔墙观物”。在机器视觉、制造业、医学成像、自动驾驶、军事反恐等领域具有广阔的应用前景。nlos基于飞行时间探测技术,主动向一个中介反射面发射激光,利用探测器捕获从隐藏物体上发生散射返回的光子的空间时间信息来重建隐藏物体的形状。
3.在nlos的研究中,为了提高重建质量和效率,人们主要从三维重建算法、成像装置和中介反射面的选择等方面进一步改进,如对反投影算法改进从而实现了多目标nlos、远距离nlos和快速反投影nlos。也有人引入深度学习来解决nlos问题。在之前的研究中,人们使用条纹相机、单光子雪崩二极管(single-photon avalanche diode,spad)、飞行时间(time of flight,tof)相机等作为探测器做了大量研究。
4.目前主流的nlos是基于瞬态光传输进行研究的,主要包括椭圆反投影方法、光锥变换反演法和凸优化法等。椭圆反投影法对于存储和处理的要求较高,并且接收到的回波信号弱,基于光锥变换的非视域成像通过使用共焦扫描系统解决了回波信号弱的问题。
5.光锥变换反演法将探测器捕获到的瞬态图像表示为一个三维卷积,该卷积在变换域中模拟自由空间的光传输,光锥变换提供了快速且高效的方式计算反向光传输。可以将光锥变换反演法看作是解卷积的过程,维纳滤波是经典的解卷积方法,其中功率谱密度信噪比(power spectral density noise-to-signal ratio,psdnsr)决定了重建成像的质量,psdnsr通常采用经验值或者反复尝试来获取,该方法进行解卷积很难一步就找到最佳的psdnsr,需要手动调节psdnsr进行多次实验。也有其他自适应确定psdnsr的方法,但是这种方法存在迭代运算,计算复杂度高,导致计算时间长,从而影响了非视域成像的实时应用。
技术实现要素:
6.本发明解决的技术问题:基于共焦光路的光锥变换反演法可以看作是维纳滤波解卷积的过程,其中psdnsr决定了重建成像的质量,但很难一步就找到最佳的psdnsr,需要手动调节psdnsr进行多次实验。本发明针对该问题,引入瞬态图像的中频域概念,对psdnsr进行估计。
7.本发明的
技术实现要素:
本发明根据瞬态图像的中频域即没有被噪声淹没也不含过多的瞬态图像信息的特性,计算出瞬态图像频谱的中高频转折点u
mh
,对psdnsr进行估计,提供一种基于中频域维纳滤波的非视域成像方法,具体实现步骤为:
8.步骤1、在非视域共焦成像系统中,使用探测器捕获瞬态图像;
9.步骤2、将经过变量代换的瞬态图像进行傅里叶变换得到瞬态图像的频谱;
10.步骤3、计算所述频谱的某条对数谱线的中高频界;
11.步骤4、将功率谱密度噪信比用常数项代替,用中频域对该常数项进行估计;
12.步骤5、结合所述常数项采用基于中频域的维纳滤波方法进行反卷积从而实现非视域成像。
13.更进一步的,步骤3中高频界的计算公式为:
[0014][0015]
式中,u
mh
表示瞬态图像的中高频界,gr(u)表示步骤3中的所述对数谱线平滑之后的曲线,u为离散频率并且u∈u
t
=[0,u
t
],u
t
表示该对数谱线的中点位置的频率,因为该曲线是对称的,所以只考虑前半个周期上的值,u
t
表示该对数谱线前半个周期的取值范围。
[0016]
步骤4中,常数项的计算公式为:
[0017][0018]
式中,k表示代替维纳滤波解卷积所用psdnsr的常数项,u∈u
t
=[0,u
t
],是共焦非视域成像模型中光锥变换卷积核的傅里叶变换,(u,v,w)表示三维频率坐标,参数η为“噪声抑制参数”,用来调节噪声和图像细节的平衡。
[0019]
本发明与现有技术相比的有益效果在于:
[0020]
(1)本发明方法能一步直接估计出psdnsr;
[0021]
(2)相比其他方法,本发明方法估计psdnsr没有迭代运算,计算复杂度低;
[0022]
(3)本发明估计的psdnsr能够稳定的落在一个重建效果较好的量级,能够在保证重建效果的前提下提升重建效率。
附图说明
[0023]
图1是实施例中共焦非视域场景的示意图和实验装置图;
[0024]
图2是实施例中的隐藏场景“房屋”形纸板;
[0025]
图3是实施例中时瞬态图像的频谱图;
[0026]
图4是实施例中频谱图里过原点的一条线;
[0027]
图5是实施例中使用基于中频域的非视域成像算法重建的隐藏物体。
具体实施方式
[0028]
以下是本发明的具体实施办法。但以下的实施例仅限于解释本发明,本发明的保护范围应包括权利要求的全部内容,而且通过以下实施例对该领域的技术人员即可以实现本发明权利要求的全部内容。
[0029]
本实施例以我们在实验室的某次共焦非视域成像实验为例,实验场景如图1所示,该共焦非视域成像系统包含的光源为波长1530nm的激光脉冲,脉冲宽度为70ps,重复频率为40mhz,平均功率为750mw。采用的探测器为超导纳米线单光子探测系统(superconducting nanowire single-photon detector,snspd),它的探测效率约为70%。使用分束器(thorlabs ccm1-bs015/m)将探测光路和激光发射光路共轴。使用振镜
(thorlabs gvs012)来实现对中介面的扫描。时间相关单光子计数模块以1ps的时间分辨率对探测事件进行时间标记。
[0030]
隐藏场景分别为“房屋”形纸板,如图2所示。使用探测器捕获该隐藏场景的光子飞行时间直方图g(x
′
,y
′
,t),(x
′
,y
′
)表示激光在中介反射面上扫描点的坐标,t表示光子的飞行时间,对g进行变量代换得到(变量代换方法此处不再赘述,具体可见相关文献),r
t
表示对g沿时间轴衰减及重采样的矩阵,对使用维纳滤波解卷积,得到隐藏物体的反照率为
[0031][0032]
式中,是共焦非视域成像模型中光锥变换卷积核的傅里叶变换,(u,v,w)表示三维频率坐标,g(u,v,w)表示瞬态图像的傅里叶变换,rz表示对ρ沿z轴衰减及重采样的矩阵,π(u,v,w)是瞬态图像的psdnsr,一般很难求出,所以常用常数项k代替π(u,v,w),得:
[0033][0034]
本发明基于瞬态图像中频域估计k值进行共焦非视域成像的具体步骤如下:
[0035]
步骤1、在非视域共焦成像系统中,使用探测器捕获瞬态图像;
[0036]
本实施例以“房屋”形纸板为隐藏物体,使用振镜扫描中介面区域,扫描点数为64
×
64,在每个点采集时间为1s。对捕获的数据截取为64
×
64
×
512的大小,即为g(x
′
,y
′
,t)。
[0037]
步骤2、将经过变量代换的瞬态图像进行傅里叶变换得到瞬态图像的频谱;
[0038]
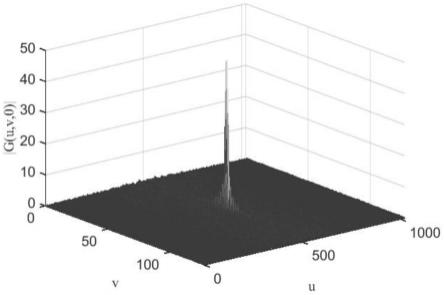
对g沿时间轴衰减及重采样得到其关系为对进行傅里叶变换得到频谱g(u,v,w),如图3所示为w=0时瞬态图像的频谱图|g(u,v,w)|。
[0039]
步骤3、计算瞬态图像频谱的某条对数谱线的中高频界;
[0040]
如图4所示为幅度|g(u,v,w)|中过原点的一条曲线|g(u,0,0)|,该曲线是对称的,只考虑前半个周期u∈u
t
=[0,u
t
]上的值,u
t
表示该曲线的中点位置的频率。根据瞬态图像频谱的对数谱线的几何特性,可以计算出u
mh
为:
[0041][0042]
其中,gr(u)是瞬态图像频谱的对数谱线平滑之后的曲线。本实施例得到u
mh
=75。
[0043]
步骤4、将功率谱密度噪信比用常数项代替,用中频域对该常数项进行估计;
[0044]
k值的计算公式为:
[0045][0046]
η为调节噪声和图像细节的参数,本实施例设置η=1.1,估计出的k值为3.6711。
[0047]
步骤5、用基于中频域的维纳滤波算法进行反卷积从而实现非视域成像。
[0048]
将k=3.6711代入式(4)进行维纳滤波解卷积,就得到了隐藏物体表面的反照率ρ
*
,如图5所示为三维重建结果的正视图、俯视图和侧视图。
[0049]
本发明未详细阐述部分属于本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1