基于人机协同作业平衡的智能制造系统重构方法
1.本发明涉及智能制造技术领域,特别涉及一种考虑人机协同作业平衡的智能制造系统重构方法。
背景技术:
2.在工业4.0时代,生产模式逐渐从大规模定制转变为大规模个性化,这需要更灵活和智能的制造系统。可重构制造系统(rms)旨在通过零件族的灵活性来满足大规模定制的需求。
3.在传统rms的范围内,最常见的重构方式是通过模块化和可积性来适应配置功能,即用标准的物理和软接口去掉、替换和添加模块;
4.随着机器人技术的发展,源自人机协作的制造灵活性可以更有效地集成新的信息和通信技术,并提高重新配置的准确性,从而提高生产率;
5.此外,数字孪生适用于增强制造系统的可重构性,是过人机协作提高制造系统重新配置效率和准确性的关键推动因素。
6.现有的人机协同任务分配方法与可重构制造系统特性及数字孪生技术,不足之处主要如下:
7.(1)大量研究将重点放在人机交互层面,希望能够提高机器人在交互过程中的某些性能,例如机器人对人意图的识别和理解的准确性、生产安全性、稳定性和效率等,缺少对人因素的考虑,忽略了人在处理突发事件和复杂任务时,无法被机器所替代的决策、判断和应变能力;
8.(2)目前人机协作问题中缺乏响应意外事件的调度重构方法,突发状况是影响生产效率的一大重要因素,如何对人机协同任务进行重新分配,使得生产进程尽量不被打断,需要继续开发更贴合生产实际的重构方法;
9.(3)操作员和机器人之间的生产特性不同,目前很少有研究关注生产任务波动引起的配置变化。模块化重新配置对于大规模个性化时代的高多样性需求来说并不高效且具有成本效益。
技术实现要素:
10.本公开提供一种基于人机协同作业平衡的智能制造系统重构方法,其能够实现对生产单元进行重构,提高生产效率。
11.具有人机协作的典型制造系统由一台机床,一个机器人,一名操作员和一些其他必要组件组成,以完成特定的生产任务。图1为人机协作制造系统的数字孪生体。由于物理空间和虚拟空间之间的数据传输无缝,具有人机协作的制造系统的数字孪生可以高保真的方式跟踪其运行状态,并有效地优化生产过程。
12.生产子任务可分为三类:必须人工生产、必须机器生产、人机均可生产,其中,人机均可实施生产的任务即为人机协同任务。例如,需要人决策的质量检测工序为必须人完成
的任务,会产生有毒气体的工序为必须机器完成的任务,简单装配工序为人机协同任务。以将不同的子任务分配给操作员或机器人,从而给予制造系统不同的配置,即制造系统的重构。
13.人机任务分配通过对人机系统中操作者和机器的功能特性进行分析,例如当操作工承担多种不同的生产任务时,需要不停转换工作类型,会增加操作工的技能学习负担和身体疲劳,使得人和机器各自的优势更明确。因此,如何通过人机协作,优化制造系统的重构过程,是亟待解决的关键问题。
14.本公开基于对人机协同作业平衡的研究,期望利用机器的优势弥补人在体力、效率、准确性上的不足,充分考虑时间的影响,寻找成本最低、最大完工时间最短、人机协同作业最平衡的协同任务分配方案。
15.在具体实现层面,本公开在给定制造系统的数字孪生体框架下,通过建立一个多目标优化数学模型,利用生产成本、最大完工时间和人机空闲程度作为分配方案的评价指标,每项指标均从人和机器人两方面进行分析,综合考虑人的因素,减少操作工的体力、脑力负荷,保证实际生产效率;结合上述评价指标,对人机协同任务分配方案的优劣性进行评价,找到最优分配方案,将生产任务合理分配至各个制造单元的操作工或机器处。
16.具体包括以下步骤:
17.步骤一、当生产任务到达时,综合分析任务生产特性,将生产任务分解为必须人完成、必须机器人完成和人机协同三类。
18.步骤二、通过历史生产数据确定各任务类别的输入数据,为剩下的数据及约束建立进行准备。
19.输入变量含义如表1所示:
20.表1.输入变量
[0021][0022]
步骤三、依据动态重构优化算法,计算人机生产成本c、最大完工时间makespan以及人机空闲时间v三个目标函数,并列出约束方程。
[0023]
目标函数如下式所示:
[0024]
minimize
[0025][0026][0027][0028]
其中,表示必须人完成的子任务成本,类似的,表示必须机器人完成的子任务成本,表示人机协作完成的子任务成
本;
[0029]
参数λi用于区分人机协作子任务i的分配对象,确保人机协作任务分配时没有重复或遗漏;
[0030]
参数μ在人的待完成任务类型数过载时取较大数,使得人成本明显增大;
[0031]
tr与to分别表示必须机器人或人完成的子任务生产时长,与分别表示协作任务分配给机器人或人的子任务生产总时长。
[0032]
约束条件可按下式确定:
[0033]
o+r+b=h
[0034][0035][0036][0037][0038][0039][0040][0041]
其中,o表示必须人完成的任务集合,r表示必须机器人完成的任务集合,b表示人机协同任务集合,表示必须机器人完成的子任务生产用时总和,表示必须人完成的子任务生产用时总和,表示协作任务中机器人的生产用时总和,表示协作任务中人的生产用时总和。
[0042]
步骤四、利用nsga-ii算法对目标函数及约束进行迭代优化,直至得到帕累托最优解集。
[0043]
在完成数学模型构建之后,需要利用优化算法实现任务动态分配。换句话说,就是需要采用恰当的优化算法寻找目标函数最优解。本公开所提出的动态重构优化模型是典型的多目标优化(moo)问题。moo问题有许多成功的算法,例如进化算法(例如nsga,nsga-ii等),禁忌搜索,粒子群优化等。nsga-ii(non dominated sorting genetic algorithm-ii,二代非支配排序遗传算法)是近年来最流行的moo问题解决算法,其可以降低非劣排序遗传
算法的复杂性,具有较高的计算效率和良好的收敛效果。因此本公开优选采用nsga-ii求解所提出的动态重构优化模型。
[0044]
nsga-ii算法程序如下:
[0045]
(1)编码。nsga-ii染色体表示子任务分配的解,这是由操作员或机器人标记的组合子任务类型,指的是协作因子λi。染色体示例如下所示,
[0046]
01001011
[0047]
其中表示将第1、第3、第4和第6个子任务类型分配给操作员,并将剩余子任务类型分配给机器人。尽管子任务类型使用数学集表示,但为了便于计算,将首先执行子任务排序。
[0048]
(2)种群初始化。初始种群是随机生成的,涉及q个体。
[0049]
(3)非支配排序和拥挤距离排序。初始种群根据每个个体的非劣等溶液水平分为几个方面。当合并亲本和后代导致2q大小时,种群大小应修改为q。当包括特定前沿时,拥挤距离排序导致新的种群规模超过q。图3显示了排序细节。
[0050]
(4)终止条件。如果达到最大种群,则优化过程完成,将获得帕累托最优解;否则,将进行下一步。
[0051]
(5)后代种群生成。通过选择、交叉和变异产生后代种群。首先,采用锦标赛选择,基于非支配排序和拥挤距离排序,从父群体中随机选择两个个体。其次,采用二进制交叉算子随机确定交叉位置。第三,多项式变异算法用于随机改变母染色体的特定基因。
[0052]
(6)合并亲本种群和后代种群。合并亲本种群和后代种群,以获得大小为2q的新种群。重复执行(3)步骤,进行快速非支配排序。
[0053]
步骤五、在上一步中得到的帕累托最优解集中任选出最优分配方案。
[0054]
自此,就完成了考虑人机协同作业平衡的智能制造系统重构方法的实施过程。
[0055]
与现有技术相比,本公开的有益效果是:(1)人机协同作业平衡的多目标优化模型同时考虑了人机双方的生产成本、最大完工时间以及协同作业任务量的平衡性,减少计算复杂度和计算量,提高重构效率;(2)充分考虑了人的特点,能够减轻操作工学习新技术的压力,避免操作类型频繁转换造成生理和心理上的疲劳,减少工作失误,提高生产效率;(3)利用数字孪生作为赋能工具,建立物理空间和虚拟空间之间的无缝数据传输以及高保真虚拟模型,实现对生产过程的实时监控,提高重新配置的准确性。
附图说明
[0056]
通过结合附图对本公开示例性实施例进行更详细的描述,本公开的上述以及其它目的、特征和优势将变得更加明显,其中,在本公开示例性实施例方式中,相同的参考标号通常代表相同部件。
[0057]
图1显示人机协作制造系统的数字孪生体;
[0058]
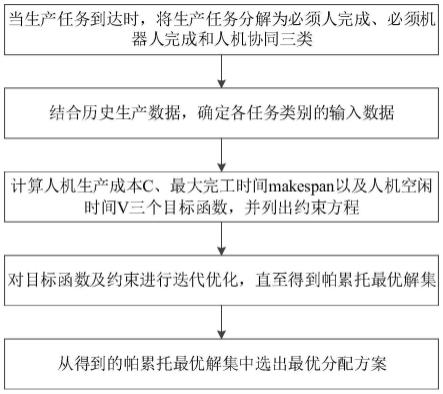
图2为根据本公开的示例性实施例流程图;
[0059]
图3为部分优化结果;
[0060]
图4为帕累托前沿面。
具体实施方式
[0061]
下面将参照附图更详细地描述本公开的优选实施例。虽然附图中显示了本公开的优选实施例,然而应该理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了使本公开更加透彻和完整,并且能够将本公开的范围完整地传达给本领域的技术人员。
[0062]
本公开提出一种基于人机协同作业平衡的智能制造系统重构方法,示例性实施例流程图如图2所示,主要包括以下步骤:
[0063]
步骤一、当生产任务到达时,综合分析任务生产特性,将生产任务分解为必须人完成、必须机器人完成和人机协同三类。
[0064]
步骤二、通过历史生产数据确定各任务类别的输入数据,为剩下的数据及约束建立进行准备。
[0065]
步骤三、依据动态重构优化算法计算人机生产成本c、最大完工时间makespan以及人机空闲时间v三个目标函数,并列出约束方程。
[0066]
步骤四、利用nsga-ii算法对目标函数及约束进行迭代优化,直至得到帕累托最优解集。
[0067]
步骤五、在上一步中得到的帕累托最优解集中任选出最优分配方案。
[0068]
应用示例
[0069]
待分配子任务分类及人机成本、时间信息如表2所示。
[0070]
表2.子任务成本、时间信息
[0071][0072]
此外,工人生产任务类型疲劳上限taskmax设置为5,大数约束mass设置为100。将协作因子λi作为变量,生成0~1之间的数,在运算过程中将小于0.5的值取0(表示对应子任务分配给人),大于等于0.5的值取1(表示对应子任务分配给机器人)。通过nsga-ii算法,部分优化结果如图3所示。
[0073]
图中,横向有11个值,其中前6个为协作因子λi的值,如前面部分说明的:当λi《0.5时,目标函数计算时取0,表示该协同任务分配给人;同理,当λi≥0.5时,目标函数计算时取1,表示该协同任务分配给机器人。
[0074]
第7~9个值表示的是三个目标函数的值:成本c、最大完工时间makespan以及人机空闲v。
[0075]
第10个值表示nsga
‑ⅱ
算法非支配排序的等级数。
[0076]
第11个值表示nsga
‑ⅱ
算法拥挤度。
[0077]
纵向仅截取了部分分配方案的优化结果,每一行表示一种分配优化结果,因为λi《0.5的值均表示协同任务i分配给人,λi≥0.5的值均表示协同任务i分配给机器人,所以有很多优化结果其实代表的是同一分配方案。
[0078]
本公开研究的是三目标问题,所以获得帕累托前沿最优解为前沿面,如图4所示。
[0079]
对协同任务分配结果进行整理,如表3所示。最终分配结果有两种分配方案:人的任务集={2,3,4,6},机器人的任务集={1,5,7,8,9};人的任务集={2,5,6},机器人的任务集={1,3,4,7,8,9}。
[0080]
表3.最终任务分配结果
[0081][0082]
上述技术方案只是本发明的示例性实施例,对于本领域内的技术人员而言,在本发明公开了应用方法和原理的基础上,很容易做出各种类型的改进或变形,而不仅限于本发明上述具体实施例所描述的方法,因此前面描述的方式只是优选的,而并不具有限制性的意义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1