一种基于sEMG信号的外骨骼关节角度预测方法及系统
本发明属于外骨骼机器人人机交互,具体属于一种基于semg信号的关节角度预测方法。
背景技术:
1、主动康复是在外骨骼机器人的辅助下,患者通过自身的运动能力完成康复训练动作。主动康复能够使患者充分调动自身潜在的运动能力,使肌肉得到充分的锻炼,因此能够加速康复进程,提高康复效果。然而,主动康复需要对人体的运动意图进行实时、准确的预测和判断,才能控制设备在运动过程中施加适当的辅助,更有效的帮助患者顺利完成康复动作。现在主要有两类方法来检测人体运动的意图,其中一种常用的方法就是测量人机之间的各种接触信息,如位置、力信息,根据测量出人机之间的角度变化和人体运动学信息等,对人体的运动意图进行判断。尽管这种方法具有更强的可靠性,但存在一定的滞后性。另外一种是将人体本身的生物电信号(主要是semg信号)检测出来,根据测得的人体生物信号,对运动的意图进行判断,然后可以根据建立的生物模型来对应确定关节的角度或力矩信息,以此作为控制器的输入方式,现有研究基于semg信号进行连续运动量估计和预测的都是以粒子群算法作为估计算法,但是粒子群算法的缺点为:网络权重的编码而且遗传算子的选择有时比较麻烦。惯性权重w很小时偏重于发挥粒子群算法的局部搜索能力;惯性权重很大时将会偏重于发挥粒子群算法的全局搜索能力。选择合适的遗传算子的权重参数和更新参数就比较复杂,因此提供一种降低复杂度的预测方法就显得比较重要了。
技术实现思路
1、本发明旨在解决以上现有技术的问题。提出了一种降低计算复杂度的基于semg信号的外骨骼关节角度预测方法及系统。本发明的技术方案如下:
2、一种基于semg信号的外骨骼关节角度预测方法,其包括以下步骤:
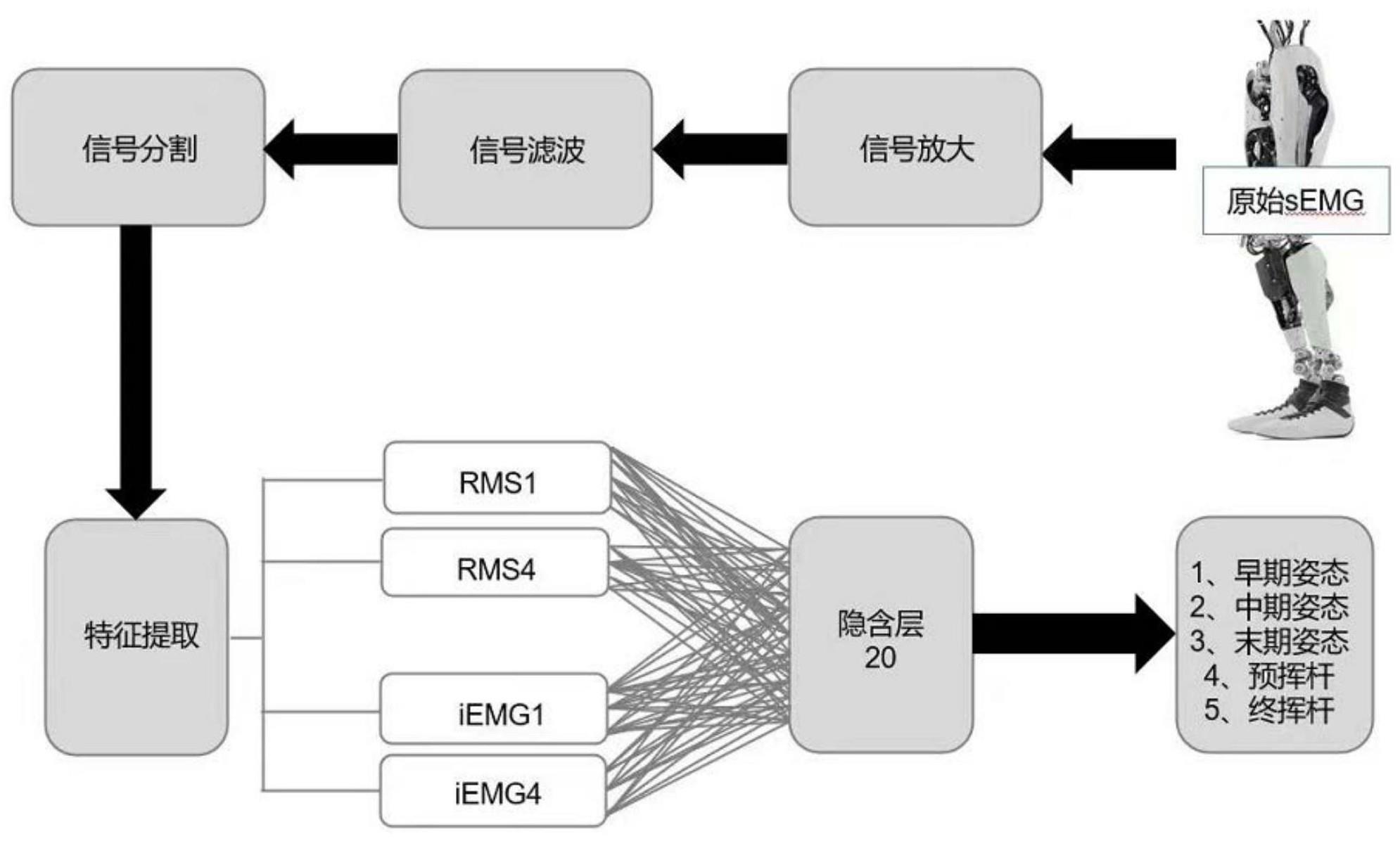
3、获取外骨骼关节的semg肌电信号,并对采集的外骨骼关节semg肌电信号进行信号放大处理;
4、采用emd和小波联合去噪的方式对外骨骼关节semg肌电信号进行滤波处理;
5、对经过滤波处理的外骨骼关节semg肌电信号采用移动窗单门限多阈值方法进行信号分割,获取起始和结束位置;
6、采用基于动态相关性和冗余性分析的前向特征选择方法,提取外骨骼关节semg信号的特征参数;
7、将获得的特征参数输入bp神经网络进行训练和学习,并采用贝叶斯滤波方法融合多类信号之间产生的协同信息,得到关节角度值预测结果。
8、进一步的,所述采用emd和小波联合去噪的方式对外骨骼关节semg肌电信号进行滤波处理,具体包括:
9、步骤1:采用emd法对带噪信号进行分解,得到imf分量;
10、步骤2:通过计算每一个imf分量与带噪信号的相关性,确定每一个imf分量中是否包含信息数据;
11、步骤3:找到信号模态和噪声模态之间的分界点k;
12、步骤4:使用小波阈值降噪算法进行降噪处理,对原信号进行n层小波变换,得到对应的小波轮廓系数和小波系数,对小波轮廓系数和小波系数进行阈值处理,得到硬阈值和软阈值;
13、步骤5:对小波系数进行稀疏化处理,利用小波轮廓系数和小波系数进行信号重构。
14、进一步的,对经过滤波处理的外骨骼关节semg肌电信号采用移动窗单门限多阈值方法进行信号分割,获取起始和结束位置,具体包括:
15、移动窗:指的是以固定窗口大小往某个方向移动,计算范围限制在这个窗口内;阈值,即一个划分正常与异常的界限,可以是一个确定的点,也可以是一个范围内,当采集值超过了这个界限,既把这个采集点作为异常点;在一个窗口内,当异常点的个数达到一定数量,个数根据具体的监控指标业务经验来配置,就在这个窗口期产生一个原始告警。
16、进一步的,所述采用基于动态相关性和冗余性分析的前向特征选择方法,提取外骨骼关节semg信号的特征参数,具体包括:
17、所述前向特征选择方法drffs是一种filter和wrapper混合的算法,首先通过多filter算法分数融合的方式来衡量特征与类标间的总体相关性;之后在分数融合的基础上,结合候选特征与已选子集的冗余性动态地改变候选属性的互补性,并运用基于排序的前向搜索策略选择最终的特征子集;通过特征组和遗传算法结合的方式,加速了问题求解的速度,并提高了解空间的质量。
18、进一步的,所述bpnn网络包含输入层、隐含层、输出层三层结构,输入层接收数据,输出层输出数据,前一层神经元连接到下一层神经元,收集上一层神经元传递来的信息,经过“激活”把值传递给下一层。
19、进一步的,所述隐藏层包含20个节点,其中有8个特征经过放大、滤波、分段后,从分段后的semg信号中提取输入,输出层由单个节点(相位)组成;最后,通过低秩方法将肌电生物信号与力、位置在内的物理反馈信号进行稀疏化处理,剔除冗余信息并保留生物信号的快速、准确性与物理信号的持续、鲁棒性。
20、进一步的,所述采用贝叶斯滤波方法融合多类信号之间产生的协同信息,得到关节角度值预测结果,具体包括:
21、滤波就是结合不同传感器获得的数据来确定状态变量的置信度,通过滤波将错误数据滤除掉,在参数滤波中的表现就是减小变量状态的方差,在粒子滤波中就是排除错误的粒子;
22、贝叶斯滤波的框架就是将两个不同的传感器数据一个用来预测下一时刻状态、一个当作观测来校正预测的状态;通过获得不同时刻传感器数据不断的进行迭代来估计机器人当前的状态信息,前一个可以叫做状态预测,后一个叫做测量更新;
23、贝叶斯滤波只是一个框架,这个框架就是在处理两个传感器数据融合时,将一个传感器数据用来预测下一时刻变量的状态,另一个传感器的数据当作观测用来校正预测的状态,最终获得当前时刻校正后的状态。
24、一种基于semg信号的外骨骼关节角度预测系统,其包括:
25、放大模块:用于获取外骨骼关节的semg肌电信号,并对采集的外骨骼关节semg肌电信号进行信号放大处理;
26、滤波模块:用于采用emd和小波联合去噪的方式对外骨骼关节semg肌电信号进行滤波处理;
27、信号分割模块:用于对经过滤波处理的外骨骼关节semg肌电信号采用移动窗单门限多阈值方法进行信号分割,获取起始和结束位置;
28、特征提取模块:采用基于动态相关性和冗余性分析的前向特征选择方法,提取外骨骼关节semg信号的特征参数;
29、训练融合模块:用于将获得的特征参数输入bp神经网络进行训练和学习,并采用贝叶斯滤波方法融合多类信号之间产生的协同信息,得到关节角度值预测结果。
30、本发明的优点及有益效果如下:
31、本发明贝叶斯滤波方法优势在于能够利用先验信息,对观测数据中包含的不确定性进行推理和处理,是一类广泛应用于航空航天、汽车导航、金融行业的数据处理思想。有稳定的分类效率。对小规模的数据表现良好,能够处理多分类任务,适合增量式训练,尤其是数据量超过内存时,可以逐批地去增量训练。对缺失数据不太敏感,算法也比较简单,常用于文本分类。
32、emd算法在处理非线性、非平稳信号方面具有独特优势,其能根据信号本身的特点进行自适应分解,得到一系列只包含单一分量的本征模态函数imf。
33、采用基于动态相关性和冗余性分析的前向特征选择方法,提取外骨骼关节semg信号的特征参数;8组公共数据集的测试结果表明,基于动态相关性分析的前向特征选择方法不仅能选择与类标有高相关度的特征,而且能有效地降低特征子集中的冗余性。在6组公共数据上的测试结果证明,在大多数情况下,drffs不仅取得了最优分类准确率,而且同时提高了敏感度和特异度。
- 还没有人留言评论。精彩留言会获得点赞!