机动车驾驶意图识别方法、终端设备及存储介质与流程
本发明涉及无人驾驶,具体是一种面向多场景的机动车驾驶意图识别方法、终端设备及存储介质。
背景技术:
1、随着无人驾驶技术的不断发展,可以预见无人驾驶设备将会逐步地出现在各种驾驶场景下,然而,在现有条件限制下,还无法实现全面的无人驾驶。在未来相当一段时间内,道路上更多出现的是无人驾驶车辆与有人驾驶车辆共同行驶的情况。在此驾驶场景下,由于人为驾驶的主观性,整个场景存在很多的不确定性,如驾驶员的主动变道行为等。为了保障无人驾驶设备在道路行驶过程中的安全,其自身需具备对道路中行驶的机动车意图进行预测的能力,以控制避障。因此,有必要对驾驶场景下的机动车进行建模,从而预测其行为,进而为无人驾驶车辆的决策提供参考。
2、在现有技术中,对道路中行驶的机动车意图进行预测时,往往会获取其速度、尺寸、位置等特征信息,再根据这些特征信息通过基于规则或者模型的方法进行意图预测,得到最终的意图。此外,还可以通过对行驶中的机动车成像,结合提取到的图像特征进行相应分析。然而,现有技术未考虑机动车辆所处环境信息,使得最后的意图估计精度受限,且现有驾驶意图识别方法针对单一场景,不能兼顾不同场景下的驾驶意图识别,功能单一。
3、专利公开号为cn110569783a、发明名称为《一种驾驶人换道意图识别方法及系统》的方案,公开了一种行驶车辆变道意图识别的方法。该方法首先使用目标车辆历史行驶数据生成与车辆换道相关的若干备选参数;然后使用决策树模型,通过基尼系数值确定这些关联参数对驾驶人换道意图的重要度,选出与驾驶人换道意图关联紧密的表征参数,包括方向盘转角、车道偏离量和横摆角加速度;再基于k-means聚类,对方向盘转角和车道偏离量的时间序列分别聚类,确定意图起止时刻,进而确定换道意图时窗宽度;最后基于高斯概率密度函数和隐马尔可夫理论建立初始模型,以表征参数组成的多维变量的时间序列训练样本集,结合所述驾驶人换道意图时窗宽度对初始模型进行训练,得到驾驶人换道意图识别模型,用于驾驶人换道意图识别。容易看出,该方法通过对与换道意图密切相关的特征选定,从而帮助最终的意图识别,但该方法中对表征参数要求严苛,如目标车辆方向盘转角等参数不易获取,且其方法中只利用待识别车辆自身数据特征,未考虑行驶过程中周围车辆对目标车辆意图的影响,使得最后的意图判断,缺乏客观性。
4、专利公开号为cn114332808a、发明名称为《一种预测转向意图的方法及装置》的方案,公开了一种使用机动车图像提取特征来进行转向意图识别的方法。该方法首先获取目标车辆的图像并提取目标车辆边界的方向梯度直方图;然后将方向梯度直方图,输入训练完成的第一分类器,得到目标车辆的第一转向意图;再将方向梯度直方图,分别输入训练完成的各转向意图第二分类器,得到各第二分类器输出的目标车辆第二转向意图;最后根据第一转向意图以及各第二转向意图,确定目标车辆的最终转向意图。该方法通过提取图像中机动车的方向梯度直方图,送入若干个分类器,综合决策得到转向意图。一般而言,图像的处理计算量大,且边界方向梯度提取误差大,因此该方法在实时系统下识别效率受限。此外,该方法同样是只利用目标车辆特征,最后的意图识别结果没有很好地结合环境信息。
5、专利公开号为cn114701509a、发明名称为《一种面向混合交通流的驾驶意图识别方法及系统》的方案,公开了一种驾驶意图识别方法,其步骤包括:获取交通信息,交通信息包括目标车辆和周围车辆的状态信息,以及所述目标车辆的道路信息;对获取的交通信息进行预处理,预处理包括数据清洗、数据提取、特征扩充以及数据标准化;基于预处理后的交通信息,利用预设的驾驶意图识别模型(深度神经网络模型)预测目标车辆的驾驶意图;根据各驾驶意图的概率,输出概率最大的驾驶意图类别作为最后的驾驶意图,包括向左换道、车道保持和向右换道。该方法将目标车辆、周围车辆及道路信息进行综合的特征提取,其结果具有很好的客观性,可以很好地应用到特定驾驶场景下变道的意图识别。需要指出,但机动车还会遭遇路口场景下停车等待、左右转向等意图,该方法不能很好地适应不同的驾驶场景,驾驶场景下的意图识别仍需进一步探索。
技术实现思路
1、针对上述现有技术中不同场景下机动车驾驶意图识别能力不足的问题,本发明提供一种面向多场景的机动车驾驶意图识别方法、终端设备及存储介质,能够有效处理机动车不同场景下的驾驶意图自适应识别,辅助无人车综合决策。
2、为实现上述目的,本发明提供一种机动车驾驶意图识别方法,包括如下步骤:
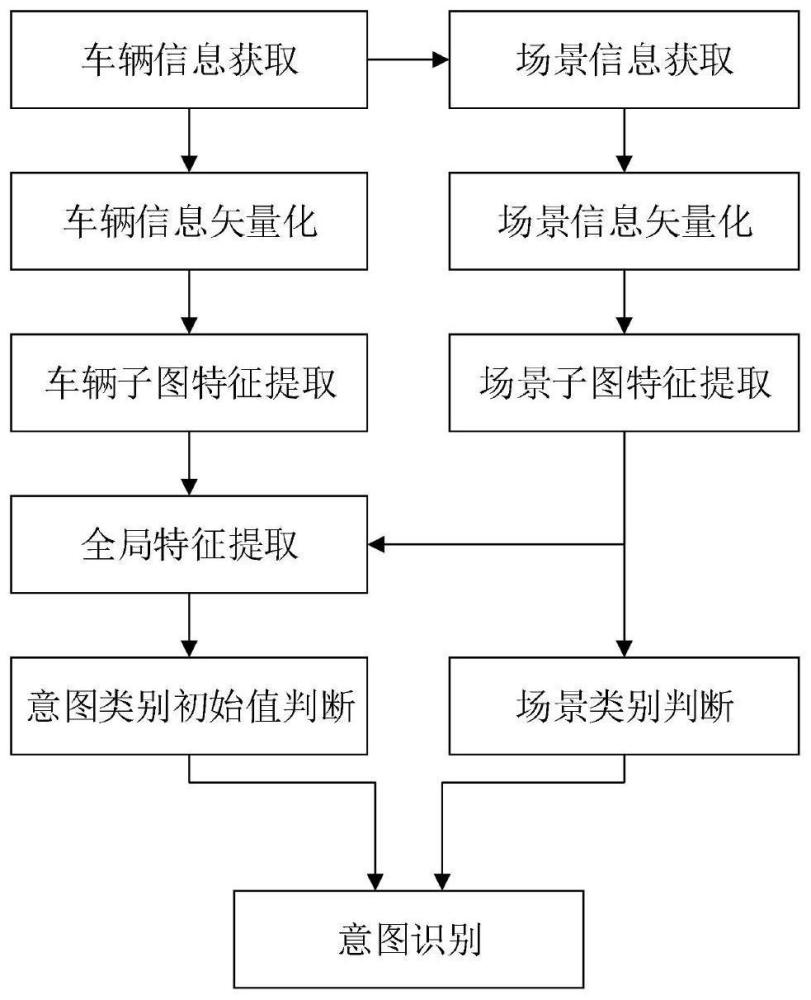
3、步骤1,获取目标车辆范围内的车辆信息与场景信息,其中,所述车辆信息为目标车辆范围内包括目标车辆在内的每个车辆信息集合体,所述场景信息为目标车辆范围内的每个场景信息集合体;
4、步骤2,将所述车辆信息、所述场景信息矢量化,得到车辆信息集合体一一对应的车辆信息矢量集合体,以及与场景信息集合体一一对应的场景信息矢量集合体;
5、步骤3,对所述车辆信息矢量集合体、所述场景信息矢量集合体进行子图特征提取,得到车辆子图特征与场景子图特征;
6、步骤4,基于场景子图特征确定当前的场景类别;
7、步骤5,将车辆子图特征与场景子图特征进行特征交互得到全局特征,并基于全局特征确定目标车辆当前的意图类别初始值;
8、步骤6,基于当前的场景类别与意图类别初始值得到目标车辆当前的意图识别结果。
9、本发明的有益技术效果在于:
10、本发明将行车场景中的车辆信息和场景信息转化为相同形式的矢量表示,使两者可以合并输入到判别网络得到意图识别结果。与其它只使用车辆信息或者分别处理两种异构信息的识别方案相比,本发明在可行性、识别效果及算力消耗上具有非常大的优势,具有非常实用的使用意义。此外,本发明不局限于单一驾驶场景下的意图识别,通过场景判断拓展驾驶场景,增大驾驶意图的识别种类,相较于直接判断复杂类别也能避免转向与变道的混淆问题,能很好地应用于实际的驾驶场景。
技术特征:
1.一种机动车驾驶意图识别方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的机动车驾驶意图识别方法,其特征在于,步骤1中,所述车辆信息为s={s0,…,si,…,sr},其中,si为第i个车辆信息集合体,r为目标车辆范围内其它车辆的数量,s0为目标车辆的车辆信息集合体;
3.根据权利要求2所述的机动车驾驶意图识别方法,其特征在于,步骤2中,将所述车辆信息矢量化的过程为:
4.根据权利要求1所述的机动车驾驶意图识别方法,其特征在于,步骤1中,所述场景信息为c={c1,…,ci,…,cm},其中,ci为第i个场景信息集合体,m为目标车辆范围内按照id将所取高精地图数据划分后的数量;
5.根据权利要求4所述的机动车驾驶意图识别方法,其特征在于,步骤2中,将所述场景信息矢量化的过程为:
6.根据权利要求1至5任一项所述的机动车驾驶意图识别方法,其特征在于,步骤3具体包括:
7.根据权利要求1至5任一项所述的机动车驾驶意图识别方法,其特征在于,步骤4中,所述基于场景子图特征确定当前的场景类别,具体为:
8.根据权利要求1至5任一项所述的机动车驾驶意图识别方法,其特征在于,步骤5中,所述将车辆子图特征与场景子图特征进行特征交互得到全局特征,具体为:
9.根据权利要求1至5任一项所述的机动车驾驶意图识别方法,其特征在于,步骤5中,所述基于全局特征确定目标车辆当前的意图类别初始值,具体为:
10.根据权利要求1至5任一项所述的机动车驾驶意图识别方法,其特征在于,步骤6中,所述目标车辆当前的意图识别结果具体为:
11.一种终端设备,其特征在于,包括:
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令;所述计算机执行指令被处理器执行时用于实现如权利要求1至10中任一所述的机动车驾驶意图识别方法的部分或全部步骤。
技术总结
本发明公开了一种机动车驾驶意图识别方法、终端设备及存储介质,包括:获取目标车辆范围内的车辆信息与场景信息;将车辆信息、场景信息矢量化,得到车辆信息矢量集合体与场景信息矢量集合体;对车辆信息矢量集合体、场景信息矢量集合体进行子图特征提取,得到车辆子图特征与场景子图特征;基于场景子图特征确定当前的场景类别;将车辆子图特征与场景子图特征进行特征交互得到全局特征,确定目标车辆当前的意图类别初始值;场景类别与意图类别初始值得到目标车辆的意图识别结果。无人驾驶技术领域,与现有的识别方案相比,本发明在可行性、识别效果及算力消耗上具有非常大的优势,具有非常实用的使用意义。
技术研发人员:安向京,朱亚东,罗辉武,胡庭波
受保护的技术使用者:长沙行深智能科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!