一种基于多尺度特征描述的复杂曲面点云配准方法、电子设备及存储介质
本发明涉及三维点云数据配准,具体涉及一种基于多尺度特征描述的点云配准方法。
背景技术:
1、在三维扫描成像技术中,通过三维扫描仪设备获取到的数据信息一般由大量的离散点来表示,这些包含三维坐标、rgb颜色值、物体反射面强度等信息量离散点的集合就被称为点云。三维点云配准是将从不同视角下采集到的实物的部分三维点云进行拼接,得到一个统一坐标系下的、完整实物的三维点云。将每一部分的三维点云看作是一个刚体,则三维点云配准问题可归结为三维刚体的坐标变换问题。点云配准作为点云数据处理的关键步骤,其配准结果直接影响后续出数据处理的精度。目前大部分配准算法都是假设配准参数初始值已知且较好的前提下,算法才收敛。而当初始值不当时,算法不能得到正确的结果,点云粗配准是点云配准的关键。近年来,三维激光扫描设备备受关注,其硬件和软件技术不断发展,扫描精度取得突破性进展。该技术的研究和应用领域主要集中在逆向过程、数字城市、无人驾驶、变形检测、地形测绘等,而点云配准算法是其中的关键步骤,配准结果好坏直接影响原始目标物体是否正确表达呈现,进而影响三维模型建立的精度。
技术实现思路
1、本发明针对一般配准算法对复杂曲面点云配准效果不理想的问题,提供一种基于多尺度特征描述的复杂曲面点云配准方法、电子设备及存储介质,其能够实现高精度的点云数据配准,有效解决因初始位置和噪点导致的点云配准失败的问题。
2、本发明的技术方案如下:
3、根据本申请的一个方面,提供一种基于多尺度特征描述的复杂曲面点云配准方法,其包括如下步骤:
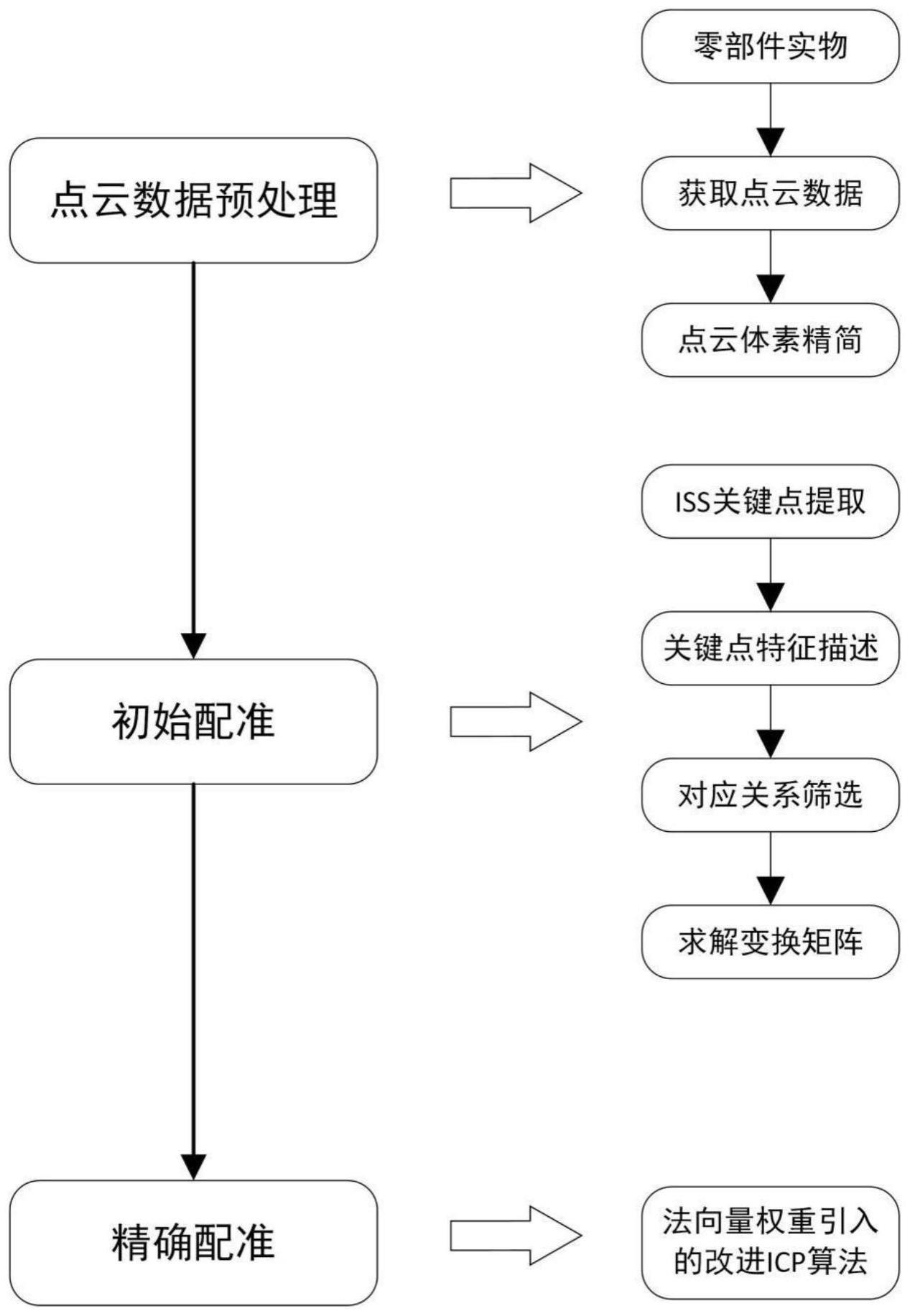
4、步骤1,点云数据预处理,包括:
5、步骤1.1,获取点云数据:获取零部件的实物即原始点云数据o和理论模型三维点云数据t;
6、步骤1.2,点云体素精简:使用改进体素降采样算法,对获取的点云数据进行精简。
7、具体是,设置体素边长l,对获取的点云数据划分到边长为l的m个网格中,得到点云数据的所体素。计算体素质心,将体素内距离体素质心最近的点作为下采样点,实现点云精简,得到精简后的点云o′和t′;
8、步骤2,初始配准,包括:
9、步骤2.1,关键点提取:使用iss算法提取o′和t′中的关键点集和
10、步骤2.2,关键点特征描述:对关键点集进行多尺度特征描述,并计算关键点特征描述协方差矩阵。
11、具体是,改变搜索半径t对关键点进行邻域半径搜索,从而获得关键点在不同尺度下的邻域点集。
12、计算多个尺度下的特征描述d={cr1…crs};
13、单个尺度的特征描述为:p为关键点,r为搜索尺度半径。
14、特征描述子为:
15、
16、式中,为关键点法向量,为关键点与关键点邻近点构成的向量,为关键点的邻近点法向量,为点云质心与关键点构成向量;为点云质心与关键点的邻近点构成的向量,为点云主成分。
17、计算关键点集的特征描述协方差矩阵dc=(mr1…mrs);
18、式中为特征描述均值。
19、步骤2.3,对应关系筛选:计算多尺度特征描述相似度双向查找初始对应关系,然后使用多尺度转化差异筛选对应关系。
20、具体是,计算原始点云与理论点云关键点特征描述协方差矩阵相似度sim,利用双向选择的方式,选择相似度最小的两点作为初始对应关系,相似度计算公式为:
21、s为尺度数目。
22、利用对应点多尺度邻域坐标系的转换差异向量,实现错误对应关系的剔除。
23、步骤2.4,求解变换矩阵:根据对应关系计算刚体变换矩阵,对降采样点云进行矩阵变换,实现初始配准。
24、具体是,采用奇异值分解求解有效点对的刚体变换矩阵,并对点云o′进行矩阵变换,得到点云o′′,实现点云初始配准。
25、步骤3,精确配准:使用法向量权重引入的改进icp算法实现点云精确配准。
26、在本步骤中,对于icp配准算法引入对应关系权重分配,具体是
27、对于点云o′′的点采用最近邻搜索算法查找对应点对,利用法向量为对应点对添加权重,权重计算公式为:
28、和为对应点对的法向量。
29、根据本申请的另一方面,提出一种电子设备,包括:处理器;以及存储程序的存储器,其中,所述程序包括指令,所述指令在由所述处理器执行时使所述处理器执行上面所述的基于多尺度特征描述的复杂曲面点云配准方法。
30、根据本申请的另一方面,提出一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据上面所述的基于多尺度特征描述的复杂曲面点云配准方法。
31、本发明与现有技术相比具有如下有益效果:
32、1、本发明特征描述结合了主成分和局部几何特征,采用了整体特征与局部特征融合的特征描述子,直接计算特征描述子,并通过多尺度特征描述子的归一化特征矩阵相似度查找对应关系,本方法能够充分描述点云整体和局部几何特征,同时提高运算效率和对应点查找准确度。
33、2、本发明使用重心邻近点改进的体素采样算法实现点云降采样,能够在降采样的过程中保存原点云的原有结构特征,并提高运算效率。
34、3、本发明使用不同的搜索半径获取多尺度范围点云,通过多尺度特征描述的特征矩阵相似度进行点云初始匹配,可以有效避免复杂曲面点云因局部几何特征高度相似而造成的误匹配。
35、4、本发明采用了多尺度的误配准剔除方式,为初始对应点建立不同尺度半径的局部坐标系,通过两个局部坐标系的刚体变换矩阵得到变换差异向量,通过标准差阈值对变换差异向量进行筛选实现错误对应关系的剔除,能够提高对噪声的鲁棒性和初始配准精度。
36、5、本发明在精配准中引入基与法向量的权重分配,能够较少陷入局部最优的情况,提高精配准的精度。
技术特征:
1.一种基于多尺度特征描述的复杂曲面点云配准方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于多尺度特征描述的复杂曲面点云配准方法,其特征在于:所述步骤1.2点云体素精简具体是:设置体素边长l,对获取的点云数据划分到边长为l的m个网格中,得到点云数据的所体素;计算体素质心,将体素内距离体素质心最近的点作为下采样点,实现点云精简,得到精简后的点云o′和t′。
3.根据权利要求1或2所述的基于多尺度特征描述的复杂曲面点云配准方法,其特征在于:所述步骤2.2中,对关键点集进行多尺度特征描述具体是,改变搜索半径r对关键点进行邻域半径搜索,从而获得关键点在不同尺度下的邻域点集;计算多个尺度下的特征描述d={cr1…crs};
4.根据权利要求3所述的基于多尺度特征描述的复杂曲面点云配准方法,其特征在于:所述步骤2.2中的特征描述子为:
5.根据权利要求3所述的基于多尺度特征描述的复杂曲面点云配准方法,其特征在于:所述步骤2.3中,多尺度特征描述相似度计算公式如下:
6.根据权利要求3所述的基于多尺度特征描述的复杂曲面点云配准方法,其特征在于:所述步骤2.3使用多尺度转化差异筛选对应关系是利用对应点多尺度领域坐标系的转换差异矩阵,实现错误对应关系的剔除。
7.根据权利要求3所述的基于多尺度特征描述的复杂曲面点云配准方法,其特征在于:所述步骤3中,引入法向量约束为icp算法中对应点添加权重,权重计算公式为:
8.一种电子设备,包括:处理器;以及存储程序的存储器,其特征在于,其中,所述程序包括指令,所述指令在由所述处理器执行时使所述处理器执行根据权利要求1-7中任一项所述的基于多尺度特征描述的复杂曲面点云配准方法。
9.一种存储有计算机指令的非瞬时计算机可读存储介质,其特征在于,其中,所述计算机指令用于使所述计算机执行根据权利要求1-7中任一项所述的基于多尺度特征描述的复杂曲面点云配准方法。
技术总结
本发明提供一种基于多尺度特征描述的复杂曲面点云配准方法、电子设备及存储介质,包括:步骤1,点云数据预处理,包括获取点云数据和点云体素精简;步骤2,初始配准,包括关键点提取、关键点特征描述、对应关系筛选和求解变换矩阵,利用刚体变换矩阵将物体点云数据旋转平移至理论点云数据同一坐标系上,完成点云数据的初始配准;步骤3,将初始配准点云数据作为初值,利用法向量权重引入的改进ICP算法,计算刚体变换矩阵,直到迭代次数或目标函数满足要求,完成点云配准。本发明能够有效解决一般配准算法对复杂曲面点云配准效果不理想的问题,同时缩短运算时间并提高配准精度。
技术研发人员:张明德,陈星宇,谢乐
受保护的技术使用者:重庆理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!