一种基于自然语义识别的巡检机器人远程控制系统及方法与流程
1.本发明涉及变电站智能运维技术领域,具体来说,涉及一种基于自然语义识别的巡检机器人远程控制系统及方法。
背景技术:
2.随着新型电力系统的不断建设,变电站、配电站等电力单位的日常运维工作也逐渐向数字化、智能化发展,越来越多的变电站、配电站等电力单位采用巡检机器人来完成日常的巡检工作,以此实现降低人员依赖和整体运营成本的效果。但是,目前巡检机器人的远程控制通常都是采用手势驱动的方式,由此带来了如下问题:1)由于远程控制机器人的操作步骤多、流程长且控制项多,对于经常需要调整巡检机器人运动方式、目的地、行为的运维人员来说,无疑是效率低且非常不方便的;2)只要机器人的远程控制项存在增加、修改等情况的发生,就得对远程控制系统的页面、后台接口等程序进行全面修改,不但需要各类开发人员协调完成,且升级维护的难度也在加大。
3.针对上述问题,目前还没有有效的解决办法。
技术实现要素:
4.针对相关技术中的上述技术问题,本发明提出一种基于自然语义识别的巡检机器人远程控制系统及方法,能够克服现有技术的上述不足。
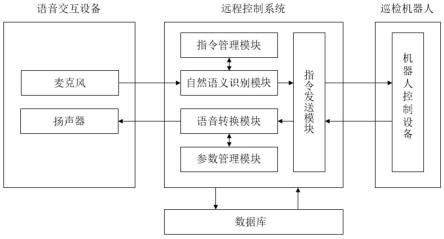
5.为实现上述技术目的,本发明的技术方案是这样实现的:一种基于自然语义识别的巡检机器人远程控制系统,包括语音交互设备、巡检机器人、远程控制系统和数据库;所述语音交互设备用于将采集到的语音数据发送给远程控制系统的自然语义识别模块,并将接收到的远程控制系统的语音转换模块发送的语音数据进行播放;所述巡检机器人包括机器人控制设备,所述机器人控制设备用于接收远程控制系统的指令发送模块发送的控制指令和参数、驱动机器人按指令行动并将结果返回给远程控制系统的指令发送模块;所述远程控制系统包括指令管理模块、自然语义识别模块、语音转换模块、参数管理模块和指令发送模块;所述远程控制系统用于将语音交互设备采集的语音数据进行自然语义识别,同时生成语义文本信息,并将识别后的关键信息转化为机器人控制指令和参数,将该机器人控制数据发送给巡检机器人,接收机器人发回的控制结果并保存到数据库中,将控制结果转化为语音并通过语音交互设备播放给运维人员;所述数据库用于存储语音、语义文本、机器人控制指令等信息。
6.进一步地,所述语音交互设备包括麦克风和扬声器。
7.一种基于自然语义识别的巡检机器人远程控制方法,包括如下步骤:s1 运维人员通过远程控制系统的指令管理模块对语音指令和参数加以维护,并
与机器人控制设备的控制指令和参数建立映射关系;s2 运维人员通过远程控制系统的参数管理模块对控制结果编码和其对应的自然语义加以维护;s3 运维人员打开远程控制系统、提交操作员信息并成功登录;s4 远程控制系统自动将语音交互设备自动设为开启状态;s5 运维人员向语音交互设备发送语音;s6 语音交互设备将麦克风采集到的语音数据发送给远程控制系统;s7 远程控制系统接收语音数据并通过自然语义识别模块对语音数据加以识别,并将识别后的语音指令和参数转化为机器人控制指令和参数;s8 远程控制系统通过指令发送模块向机器人控制设备发送机器人控制指令和参数;s9 巡检机器人通过机器人控制设备接收远程控制系统发送的控制指令和参数,驱动机器人按指令行动,并将结果返回给远程控制系统;s10 远程控制系统接收控制结果并保存到数据库中,并将控制结果按照预设的映射关系转换为自然语义数据;s11远程控制系统通过语音转换模块将控制结果的自然语义数据转换为语音数据,并将语音数据发送给语音交互设备;s12 语音交互设备接收远程控制系统发送的语音数据并通过扬声器播放。
8.本发明的有益效果:本发明充分发挥语音的便利性,通过语音实现对巡检机器人的行为控制,有效地避免了手动驱动的操作步骤多、流程长且控制项多等问题,大幅地提高工作效率;本发明可在不对远程控制系统的页面、后台接口等程序进行全面修改的情况下,就能实现控制指令的增加和维护,大幅地减少了系统开发、升级维护成本。
附图说明
9.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
10.图1是根据本发明实施例所述的基于自然语义识别的巡检机器人远程控制系统的结构框图;图2是根据本发明实施例所述的基于自然语义识别的巡检机器人远程控制方法的流程框图。
具体实施方式
11.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
12.如图1所示,根据本发明实施例所述的一种基于自然语义识别的巡检机器人远程
控制系统,包括语音交互设备、巡检机器人、远程控制系统和数据库;所述语音交互设备用于将采集到的语音数据发送给远程控制系统的自然语义识别模块,并将接收到的远程控制系统的语音转换模块发送的语音数据进行播放;所述巡检机器人包括机器人控制设备,所述机器人控制设备用于接收远程控制系统的指令发送模块发送的控制指令和参数、驱动机器人按指令行动并将结果返回给远程控制系统的指令发送模块;所述远程控制系统包括指令管理模块、自然语义识别模块、语音转换模块、参数管理模块和指令发送模块;所述远程控制系统用于将语音交互设备采集的语音数据进行自然语义识别,同时生成语义文本信息,并将识别后的关键信息转化为机器人控制指令和参数,将该机器人控制数据发送给巡检机器人,接收机器人发回的控制结果并保存到数据库中,将控制结果转化为语音并通过语音交互设备播放给运维人员;所述数据库用于存储语音、语义文本、机器人控制指令等信息。
13.实施例中,所述语音交互设备包括麦克风和扬声器。
14.如图2所示,根据本发明实施例所述的一种基于自然语义识别的巡检机器人远程控制方法,包括如下步骤:s1 运维人员通过远程控制系统的指令管理模块对语音指令和参数加以维护,并与机器人控制设备的控制指令和参数建立映射关系;s2 运维人员通过远程控制系统的参数管理模块对控制结果编码和其对应的自然语义加以维护;s3 运维人员打开远程控制系统、提交操作员信息并成功登录;s4 远程控制系统自动将语音交互设备自动设为开启状态;s5 运维人员向语音交互设备发送语音;s6 语音交互设备将麦克风采集到的语音数据发送给远程控制系统;s7 远程控制系统接收语音数据并通过自然语义识别模块对语音数据加以识别,并将识别后的语音指令和参数转化为机器人控制指令和参数;s8 远程控制系统通过指令发送模块向机器人控制设备发送机器人控制指令和参数;s9 巡检机器人通过机器人控制设备接收远程控制系统发送的控制指令和参数,驱动机器人按指令行动,并将结果返回给远程控制系统;s10 远程控制系统接收控制结果并保存到数据库中,并将控制结果按照预设的映射关系转换为自然语义数据;s11远程控制系统通过语音转换模块将控制结果的自然语义数据转换为语音数据,并将语音数据发送给语音交互设备;s12 语音交互设备接收远程控制系统发送的语音数据并通过扬声器播放。
15.为了方便理解本发明的上述技术方案,以下通过具体使用方式上对本发明的上述技术方案进行详细说明。
16.在具体使用时,根据本发明所述的一种基于自然语义识别的巡检机器人远程控制系统组成部分,包括:语音交互设备、机器人控制设备、远程控制系统、数据库等4个部分,图1为各组成部分的结构关系图,具体功能说明如下:
1、语音交互设备,包括麦克风和扬声器,麦克风采集运维人员语音,扬声器播放控制结果语音;2、机器人控制设备,用于接收远程控制系统发送的控制指令和参数,驱动机器人按指令行动,并将结果返回给远程控制系统;3、数据库,用于存储语音、语义文本、机器人控制指令等信息;4、远程控制系统,用于将语音交互设备采集的运维人员语音进行自然语义识别,将识别后的关键信息转化为机器人控制指令和参数,将该机器人控制数据发送给巡检机器人,接收机器人发回的控制结果并保存到数据库中,将控制结果转化为语音并通过语音交互设备播放给运维人员。
17.一种基于自然语义识别的巡检机器人远程控制方法的流程图,如图2所示,其具体控制流程说明如下:1、运维人员,通过远程控制系统的指令管理模块对语音指令和参数加以维护,并与机器人控制指令和参数建立映射关系;2、运维人员,通过远程控制系统的参数管理模块对控制结果编码和其对应的自然语义加以维护;3、运维人员,打开远程控制系统,提交操作员信息并成功登录;4、远程控制系统,自动将语音交互设备自动设为开启状态;5、运维人员,向语音交互设备发送语音;6、语音交互设备,将麦克风采集到的语音数据发送给远程控制系统;7、远程控制系统,接收语音数据并通过自然语义识别模块对语音数据加以识别,并将识别后的语音指令和参数转化为机器人控制指令和参数;8、远程控制系统,通过指令发送模块向机器人控制设备发送机器人控制指令和参数;9、巡检机器人,通过机器人控制设备接收远程控制系统发送的控制指令和参数,驱动机器人按指令行动,并将结果返回给远程控制系统;10、远程控制系统,接收控制结果并保存到数据库中,并将控制结果按照预设的映射关系转换为自然语义数据;11、远程控制系统,通过语音转换模块将控制结果的自然语义数据转换为语音数据,并将语音数据发送给语音交互设备;12、语音交互设备,接收远程控制系统发送的语音数据并通过扬声器播放。
18.综上所述,借助于本发明的上述技术方案,充分发挥语音的便利性,通过语音实现对巡检机器人的行为控制,有效地避免了手动驱动的操作步骤多、流程长且控制项多等问题,大幅地提高工作效率;同时可在不对远程控制系统的页面、后台接口等程序进行全面修改的情况下,就能实现控制指令的增加和维护,大幅地减少了系统开发、升级维护成本。
19.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1