基于CFD模拟和测风激光雷达的风场重建方法及系统
基于cfd模拟和测风激光雷达的风场重建方法及系统
技术领域
1.本发明涉及大气风场测量领域,更具体地说,涉及基于cfd模拟和测风激光雷达的风场重建方法及系统。
背景技术:
2.传统数值天气预防方法系统如wrf,常用全球或跨区域的三维风场预报,而针对局部区域(工业园区、城市、机场等)的精细风场建立,是目前很多工程和科学问题的关键。例如,恶臭异味污染是指一切能够通过刺激嗅觉感官从而引起人类心理厌恶感的气体,它往往是由多种有机物组分构成的混合物,是一种典型的大气环境污染。恶臭异味污染不仅对人体健康造成伤害,而且对社会稳定和经济发展都会产生影响。实现工业园区三维风场重建,可用于深入研究化工园区的恶臭异味污染的时空分布特征,并对恶臭异味污染进行溯源和未来轨迹的分析,在经济和社会效益上都具有重要意义。随着航空运输总量的不断增长,飞机的飞行密度也迅速膨胀,而机场风切变事故也不断地报道出来,低空风切变严重威胁飞行安全。由于风场具有随机性、变化快等特点,机场三维空间风场建立,对威胁飞机飞行的安全危险事件(风切变、大风、阵风、顺风、侧风、湍流等)的实时预警和预报具有重大意义。此外,局部三维精细风场的重建和预报,对风力发电场、城市风风场、山地风场、桥梁建筑风工程都有重大应用价值。
3.目前针对对局部区域三维风场的实验测量手段包括探空气球、风廓线仪、测风激光雷达、地基风速仪等等,但是这探测设备只能对局部的空间的风场采样,覆盖面低。虽然遥感测风设备如测风激光雷达能通过扫描来对空间风场进行采样,但是耗时长、光束常被地表建筑或地形遮挡,且只能获得较为准确的径向速度,其他分速度的反演精度有限。现有的探测手段都无法直接获得局部区域的三维精细风场。计算流体动力学(cfd)模拟通过求解控制流体流动的微分方程,可以模拟精细的风场流动情况,具有成本低,信息全、距离分辨率高和能模拟实际过程中各种状态的优点,随着高性能计算机的发展,cfd被广泛应用于城市风场研究中。而实际风场情况非常复杂,cfd模型的复杂初始条件和边界条件难以准确获取,难以适应不同的物理场景,且cfd模拟的计算量大,实时性较差。将探测技术和模拟技术的优缺点结合起来实现三维精细风场重建,具有重大意义。
技术实现要素:
4.1.要解决的技术问题针对现有技术中存在的问题,本发明的目的在于提供基于cfd模拟和测风激光雷达的风场重建方法及系统,它能够根据测风激光雷达测量数据,结合cfd数据库,实现局部区域精细风场的重建,可用于机场气象保障、城市风场、山地风场研究,以及化工园区的污染和异味溯源和扩散追踪。
5.2.技术方案为解决上述问题,本发明采用如下的技术方案。
6.基于cfd模拟和测风激光雷达的风场重建方法,包括以下步骤:s1、根据局部区域的地形和建筑,进行网格划分,对计算域进行离散化,建立cfd模型;s2、根据测风激光雷达历史探测数据和当地气象日志,统计出计算域的风速风向概率密度分布;s3、对cfd模型的边界条件进行离散化,覆盖所有可能出现的来流条件,对风速风向概率密度分布大的工况进行加密离散化,建立cfd数据库;s4、测风激光雷达进行不同仰角的实时ppi扫描,反演出径向风速、水平风速和风向,根据风速风向对计算域的风场进行分块处理(v1,v2...vn),对每个分块分别匹配出最接近的cfd数据库,对于均匀风场则直接匹配不需要分块处理;s5、多源数据融合,用匹配的数据库,填补激光雷达盲区和其未为探测区域的风场结果,从而获得整个计算域内的完整的精细三维风场数据s0;s6、根据雷达实测边界条件和三维风场s0作为初始场,激活cfd模拟程序可对未来三维风场分布进行预测。
7.进一步的,s1中,cfd模型包括计算网格、边界条件、计算域、湍流模型和cfd求解器。
8.进一步的,cfd模型的计算域为圆柱形,下边界为无滑移壁面边界条件,上边界条件为对称边界条件,前方来流为速度入口。
9.进一步的,s2中,通过当地气象局获得气象日志中风速风向数据。
10.进一步的,s2中,通过提前布置测风激光雷达进行长期观测试验,统计出目标区域的风速风向概率密度分布。
11.进一步的,s3中,在进行边界条件离散时,对风速风向概率密度分布大的工况进行加密离散化处理;对于风速风向概率密度低的情况,设置梯度更稀疏的计算工况。
12.进一步的,s3中,仅保留目标区域网格节点位置(x,y,z)和风场数据(u,v,w),x为水平方向坐标、y侧向坐标,w为竖直方向坐标,u为南北方向分速度、v东西分速度、w为竖直分速度,并记录目标区域的平均风速。
13.进一步的,s4中,对于存在风速风向突变、阵风情况下,不同区域的风场流入情况不同,此时则根据目标区域的风速和风向分布进行分块处理,相邻距离门风速差异小于第一阈值w1且风向差异小于第二阈值d1,分类为同一块区域,将探测区域分为(v1,v2...vn),对每个分块分别匹配出最接近的cfd数据库(c1,c2...cn);罚函数为:其中:其中:其中:其中:其中:其中:
其中,和分别为分速度项和径向速度项,和为对应的加权系数,,,和分别为雷达反演的南北方向分速度、东西方向分速度,竖直方向分速度和径向速度,,和分别为cfd模拟数据库中的南北方向分速度、东西方向分速度和竖直方向分速度,和分别为方位角和俯仰角,为网格节点三维坐标的标号;所示加权系数和由雷达反演的南北方向分速度、东西方向分速度,竖直方向分速度和径向速度的反演精度决定,反演精度越高,则对应的加权系数应设置的越大。
14.进一步的,s5中,完整的精细三维风速数据s0包括实测风场数据和cfd模拟数据,完整的精细三维风速数据s0中有实测风场数据计算网格节点,直接保留实测数据,没有实测风场数据的计算网格节点,则采用匹配的cfd模拟数据。
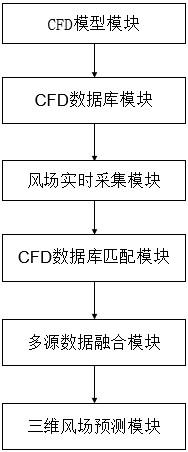
15.应用于基于cfd模拟和测风激光雷达的风场重建方法的系统,包括:cfd模型模块,用于根据目标区域的地形和建筑的几何参数建立目标区;cfd数据库建立模块,根据目标区域的风速风向分布的概率分布,对cfd边界条件进行离散化,并分别求解这些计算工况,批量输出节点坐标和风速,建立目标区域的cfd风场数据库;风场实时采集模块,基于测风激光雷达实时对目标区域的风场进行采样;cfd数据库匹配模块,用于实测数据和cfd数据库匹配;多源数据融合模块,用于实测数据和cfd模拟数据的融合;三维风场预测模块,基于初始场,求解未来风场变化。
16.3.有益效果相比于现有技术,本发明的优点在于:(1)本发明根据激光雷达、地基风速仪等实测风场数据,可实现对目标区域cfd模型的反复修正和验证,可以获得准确合理的cfd模型。
17.(2)本发明在建立cfd数据库时,在进行边界条件离散时,根据目标区域风速风向的概率分布来进行边界条件离散,可减少计算工况并节约计算成本。
18.(3)本发明在测风激光雷达实测数据与cfd数据库匹配前,先根据测风激光雷达实测结果进行分块处理,充分考虑了实际风场常常出现风速风向转变情况,在进行cfd数据匹配时,根据反演精度来确定加权系数,提高了匹配精度。
19.(4)本发明充分利用了测风激光雷达测风精度高的特点和cfd模拟风场信息全的特点,弥补了测风激光雷达采样空间有限,容易受挡的缺点,弥补了cfd难以模拟多变的复杂环境的缺点。
附图说明
20.图1为本发明实施例提供的方法流程图;
图2为本发明实施例提供的系统模块流程图;图3为本发明实施例提供的cfd网格模型示意图;图4为本发明实施例提供的三维风场重建结果示意图。
具体实施方式
21.下面将结合本发明实施例中的附图;对本发明实施例中的技术方案进行清楚、完整地描述;显然;所描述的实施例仅仅是本发明一部分实施例;而不是全部的实施例,基于本发明中的实施例;本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例;都属于本发明保护的范围。
22.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
23.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
24.实施例1:请参阅图1,基于cfd模拟和测风激光雷达的风场重建方法,包括以下步骤:s1、根据局部区域的地形和建筑,进行网格划分,对所研究空间(计算域)进行离散化,建立计算流体动力学(cfd)模型;其中,局部区域,包括机场、工业园区、城市、山地、体育赛场的空域。
25.cfd是计算流体动力学(computational fluid dynamics)的简称,是流体力学和计算机科学相互融合的一门新兴交叉学科,它从计算方法出发,利用计算机快速的计算能力得到流体控制方程的近似解。
26.s1具体包括:cfd模型包括计算网格、边界条件、计算域、湍流模型、cfd求解器等,局部地形和建筑可通过gis数据、激光雷达测绘点云数据构建,采用专业网格划分软件获得目标区域的网格文件。
27.cfd模型的计算域为圆柱形,下边界为无滑移壁面边界条件,上边界条件为对称边界条件,前方来流为速度入口。
28.cfd求解器可采用商用软件(如fluent),或基于开源cfd计算平台(如openfoam)。
29.下面以一个具体的应用场景来对本发明的方法进行详细阐述:根据目标区域的地形和建筑,建立目标区域三维几何模型,为了减小网格数量和计算复杂度,在几何建模过程中仅保留建筑的主体结构,忽略局部微小结构。为了方便边界条件的设置和网格划分,典型网格模型如图3所示。
30.整个计算域采用非结构化网格和结构化网格相结合的混合网格方式,对地形和建筑表面网格进行加密处理以精确捕捉表面流场信息,在边界条件设置时,入口为速度入口,
出口设为自由出口,计算区域入口和出口边界根据风向设置,即迎风面为入口,背风面设置为出口。上边界为对称边界条件,地形和表面设置为无滑移壁面边界条件。采用粗糙壁函数,其计算公式如下:式中,e=9.793为壁面常数,c=0.327为粗糙度常数,k≈0.4是冯卡门常数,是粗糙度高度,是第一个单元中心到壁面的距离,是单元中心的摩擦速度。
31.采用openfoam计算平台中的rng k-ε湍流模型。openfoam是cfd模拟领域的免费开源软件。rng k-ε模型输运方程如下:ε模型输运方程如下:式中,和是时间和空气密度,和是湍流动能(tke)和及其耗散率,和是尺寸和上的位移,是尺寸上的速度,和是和普朗特数,是有效粘度,和分别为因平均速度梯度和浮力而产生的湍流动能和耗散率项,表示可压缩湍流中的脉动膨胀对总耗散率的贡献,和是自定义的源项,,和是常数,采用openfoam推荐的输入湍流参数,rng k-ε的默认模型系数是:。
32.s2、根据测风激光雷达历史探测数据和当地气象日志,统计出所研究区域的风速风向概率分布;在一个实施例中,可通过当地气象局可以获得气象日志中风速风向数据,此外还可以通过提前布置测风激光雷达进行长期观测试验,统计出目标区域的风速风向分布概率密度分布。
33.s3、对cfd模型的边界条件进行离散化,覆盖所有可能出现的来流条件,对风速风向概率密度分布大的工况进行加密离散化,建立cfd数据库;在一个实施例中,采用s1中的cfd模型通过离散边界条件,计算所有可能出现来流条件下的目标区域的风场,提取每个计算工况中坐标和风速信息,按照标准数据格式构建cfd模拟风速数据库。
34.在建立cfd数据库时,在进行边界条件离散时,对风速风向概率密度分布大的工况进行加密离散化处理;对于风速风向概率密度低的情况,设置梯度更稀疏的计算工况,节约了计算成本。
35.其次仅保留了目标区域网格节点位置(x,y,z)和风场数据(u,v,w),x为水平方向坐标、y侧向坐标,w为竖直方向坐标,u为南北方向分速度、v东西分速度、w为竖直分速度,并记录目标区域的平均风速,降低存储成本和索引时间。
36.在建立cfd数据库时,批量输出网格节点位置和风速信息,并按照标准格式存储。
37.s4、测风激光雷达进行不同仰角的实时ppi扫描,反演出径向风速、水平风速和风
向,根据风速风向对计算域的风场进行分块处理(v1,v2...vn),对每个分块分别匹配出最接近的cfd数据库,对于均匀风场则直接匹配不需要分块处理;在本发明的一个实施例中,测风激光雷达采用ppi扫描,即恒定天顶角模式扫描,直接获取测量方向的径向风速信息。
38.测风激光雷达进行不同仰角的实时ppi扫描,反演出径向风速、水平风速和风向,根据风速风向对计算域的风场进行分块处理。
39.对于均匀风场则直接匹配不需要分块处理;对于存在风速风向突变、阵风情况下,不同区域的风场流入情况不同,此时则根据目标区域的风速和风向分布进行分块处理,相邻距离门风速差异小于第一阈值w1且风向差异小于第二阈值d1,分类为同一块区域,将探测区域分为(v1,v2...vn),对每个分块分别匹配出最接近的cfd数据库(c1,c2...cn)。
40.罚函数为:其中:其中:其中:其中:其中:其中:其中:其中,和分别为分速度项和径向速度项,和为对应的加权系数,,,和分别为雷达反演的南北方向分速度、东西方向分速度,竖直方向分速度和径向速度,,和分别为cfd模拟数据库中的南北方向分速度、东西方向分速度和竖直方向分速度,和分别为方位角和俯仰角,为网格节点三维坐标的标号;所示加权系数和由雷达反演的南北方向分速度、东西方向分速度,竖直方向分速度和径向速度的反演精度决定,反演精度越高,则对应的加权系数应设置的越大。
41.s5、多源数据融合,用匹配的数据库,填补激光雷达盲区和其未为探测区域的风场结果,从而获得整个计算域内的完整的精细三维风场数据s0;该完整的精细三维风速数据s0包括实测风场数据和cfd模拟数据,完整的精细三维风速数据s0中有实测风场数据计算网格节点,直接保留实测数据,没有实测风场数据得计算网格节点,则采用匹配的cfd模拟数据,典型三维风速切片结果如图4所示。
42.s6、根据雷达实测边界条件和三维风场s0作为初始场,激活cfd模拟程序可对未来三维风场分布进行预测;如图2所示,相应的,应用于基于cfd模拟和测风激光雷达的局部精细风场重建方法的系统,包括:
cfd模型模块,用于根据目标区域的地形和建筑的几何参数建立目标区;cfd数据库建立模块,根据目标区域的风速风向分布的概率分布,对cfd边界条件进行离散化,并分别求解这些计算工况,批量输出节点坐标和风速,建立目标区域的cfd风场数据库;风场实时采集模块,基于测风激光雷达实时对目标区域的风场进行采样。
43.cfd数据库匹配模块,用于实测数据和cfd数据库匹配;多源数据融合模块,用于实测数据和cfd模拟数据的融合;三维风场预测模块,基于初始场,求解未来风场变化。
44.以上所述;仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此;任何熟悉本技术领域的技术人员在本发明揭露的技术范围内;根据本发明的技术方案及其改进构思加以等同替换或改变;都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1