一种机器人循迹方法及装置与流程
本发明涉及路径规划领域,具体为一种机器人循迹方法及装置。
背景技术:
1、机器人是一个集环境感知、动态决策与规划和行为控制与执行等多功能于一体的综合系统。它集中了传感器技术,机械工程,电子工程,计算机工程,自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。随着人工智能发展,机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业,农业,国防,医疗,服务等行业中得到广泛的应用,而且在排雷,搜捕,救援,辐射和空间领域等有害与危险场合得到很好的应用。针对家庭内智能机器人主要为安防监控、老幼看护等功能,而机器人导航技术和路径规划技术成为家庭内机器人尚未解决的难题。
2、导航技术是机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动,主要导航方式有磁导航、gps导航、环境地图模型匹配导航和视觉导航等。视觉导航主要是通过摄像头对障碍物和路标信息拍摄,获取图像信息,然后对图像信息进行探测和识别实现导航。它具有信号探测范围广,获取信息完整等优点,是移动机器人导航的一个主要发展方向。路径规划技术是按照某一性能指标搜索一条从起点到目标点的最优或次最优的无碰撞路径。
3、针对家庭室内机器人目前存在问题:
4、1.室内环境复杂、障碍物多和干扰物多等因素对机器人的巡航影响较大。
5、2.室内机器人不存在定点巡航功能,对视觉数据处理能力较弱。
6、3.基于地图重构方式的循迹方法存在地图重建算法复杂、循迹可靠性低、软硬件成本高等缺点。
技术实现思路
1、为克服上述针对家庭室内机器人目前存在问题:1.室内环境复杂、障碍物多和干扰物多等因素对机器人的巡航影响较大。2.室内机器人不存在定点巡航功能,对视觉数据处理能力较弱。3.基于地图重构方式的循迹方法存在地图重建算法复杂、循迹可靠性低、软硬件成本高等缺点。本发明的目的在于提供一种机器人循迹方法及装置。
2、为了达到以上目的,本发明采用如下的技术方案:
3、本发明的第一方面,提供一种机器人循迹方法,包括如下步骤:
4、获取紫外光路径:将摄像头和紫外灯固定在机器人本体的同一侧,通过紫外隐形笔设置好机器人的行动路线后,开启紫外灯,利用紫外光照射地面形成紫外光路径;
5、采集原图像iorg:通过摄像头采集包括紫外光路径的图像,即原图像iorg;
6、紫外路径特征提取:通过计算模块对所述原图像iorg进行紫外路径特征提取,获取紫外路径变化情况;
7、控制机器人移动:根据所述紫外路径变化情况控制机器人移动。
8、在一些可能的实施方式中,对所述原图像iorg进行紫外路径特征提取,获取紫外路径变化情况具体包括以下步骤:
9、对原图像iorg进行去除高光处理,得到去高光图像ihight,将所述去高光图像ihight设置紫外roi感兴趣区域region,得到紫外路径图像iroi;
10、建立所述紫外路径图像iroi的rgb模型,提取所述紫外roi感兴趣区域region的g通道路径图像ig;
11、采用中值滤波算法去除g通道路径图像ig的图像噪声;
12、对去噪后的g通道路径图像ig进行阈值分割处理,得到阈值分割图像ithreshold;
13、将阈值分割图像ithreshold进行灰度化处理,然后获取灰度化处理后的二值图像igray;
14、获取所述二值图像igray的二值化图,对所述二值化图中的紫外路径进行形态学膨胀处理,得到扩充图像idilate;
15、获取所述扩充图像idilate的紫外路径轮廓,并计算紫外路径轮廓的长宽比,设置长宽比的阈值范围为l,如果计算的紫外路径轮廓的长宽比满足长宽比的阈值范围l,则判断为路径r,否则为非路径nr。
16、在一些可能的实施方式中,对原图像iorg进行去除高光处理,得到去高光图像ihight具体包括以下步骤:
17、求取原图像iorg的平均灰度,并记录原图像i的行数row和列数column;
18、设置窗口大小为n*n,将原图像iorg按照所述窗口大小分为n*m个子块,每个子块的大小为n*n,其中,n=row/n,m=column/n;
19、获取所述子块的亮度矩阵d;用亮度矩阵d的每个元素减去原图像iorg的平均灰度,得到所述子块的亮度插值矩阵e;
20、通过插值算法,将所述亮度插值矩阵e插值成与原图像iorg一样大小的亮度分布矩阵r;
21、最后将原图像iorg与亮度分布矩阵r相减,获得矫正后的去高光图像ihight。
22、在一些可能的实施方式中,采用中值滤波算法去除g通道路径图像ig的图像噪声具体如下:
23、对g通道路径图像ig使用medianblur函数进行中值滤波,其卷积核大小为5*5;公式如下:
24、y(i)=med[x(i-n),…,x(i),…x(i+n)]
25、其中,x(i)为g通道路径图像ig的像素值,i为卷积核窗口映射至g通道路径图像ig的索引,y(i)为5*5大小窗口的中值。
26、在一些可能的实施方式中,对去噪后的g通道路径图像ig进行阈值分割处理,得到阈值分割图像ithreshold具体如下:预先设定一个特定阈值thread,大于或等于thread的像素点的灰度设定为最大值255,灰度值小于thread的像素点灰度值设定为0;采用threshold函数对去噪后的g通道路径图像ig,设定阈值为135,公式如下:
27、
28、其中,maxval为最大值255,src(x,y)为去噪后的g通道路径图像ig在(x,y)处的像素值,dst为去噪后的g通道路径图像ig在处(x,y)的阈值大小。
29、在一些可能的实施方式中,将阈值分割图像ithreshold进行灰度化处理具体如下:采用灰度化cvtcolor函数,将阈值分割图像ithreshold进行灰度化;公式如下:
30、
31、其中r为阈值分割图像ithreshold在红色通道的像素值;g为阈值分割图像ithreshold在绿色通道的像素值;b为阈值分割图像ithreshold在蓝色通道的像素值;gray为阈值分割图像ithreshold灰度化的像素值。
32、在一些可能的实施方式中,对所述二值化图中的紫外路径进行形态学膨胀处理,得到扩充图像idilate具体如下:
33、拖动结构元素在x图像域移动,在每一个位置上,当结构元素b的中心点平移到x图像上的某一点(x,y),如果结构元素的像素与目标物体至少有一个像素相交,保留此像素点,达到边界向外扩张;
34、
35、其中,x为灰度图像igray像素值,b为结构元素,bxy为结构元素原点定位在灰度图像像素坐标(x,y)处的像素值;s为膨胀后的图像目标点;表示为灰度图像与结构元素相交。
36、在一些可能的实施方式中,获取所述扩充图像idilate的紫外路径轮廓具体如下:使用findcontours函数对扩充图像idilate中紫外路径的二值图进行轮廓提取,由于二值化图中存在干扰目标,然后将路径目标区域最小外接矩形的长度、宽度、长宽比参数作为描述目标区域的重要特征,对目标特征进行筛选,最后通过提取drawcontours函数绘制路径的轮廓。
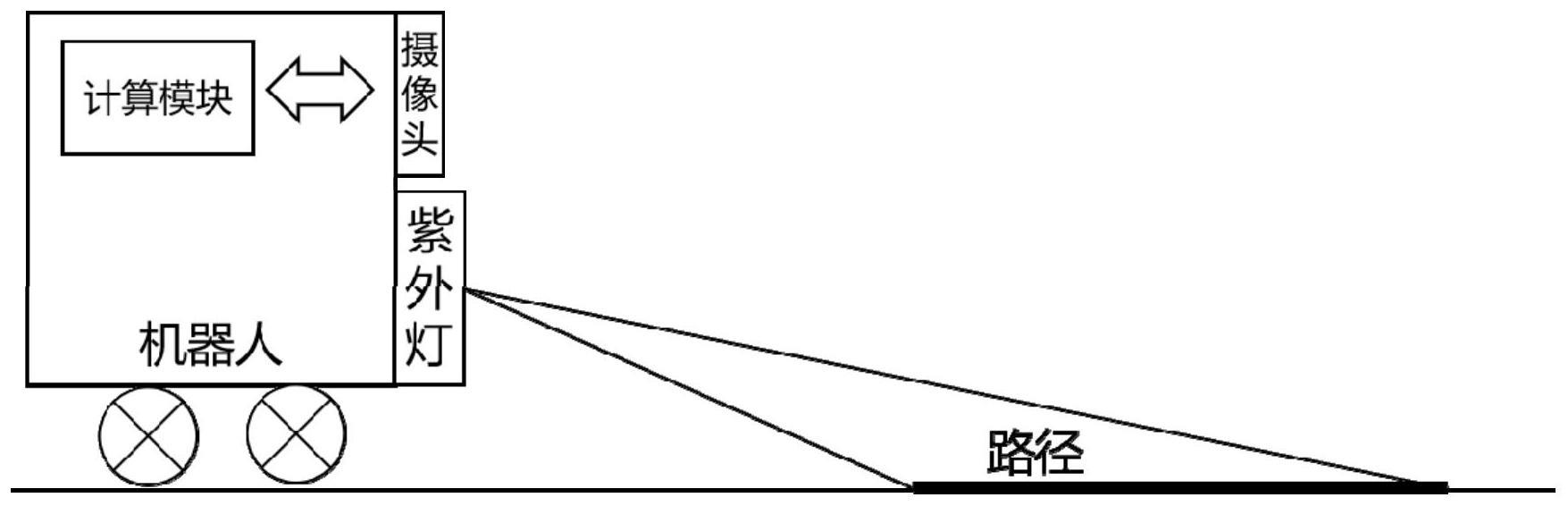
37、本发明的第二方面,提供一种机器人循迹装置,包括机器人、计算模块、摄像头和紫外灯,所述摄像头和紫外灯设置在机器人同一侧,且摄像头位于紫外灯上方,所述计算模块位于机器人内部;
38、所述紫外灯,通过紫外隐形笔设置好机器人的行动路线后,利用紫外光照射地面形成紫外光路径;
39、所述摄像头,用于采集包括紫外光路径的图像,即原图像iorg;
40、所述计算模块,用于对所述原图像iorg进行紫外路径特征提取,获取机器人的路径坐标信息,根据所述路径坐标信息控制机器人移动;
41、所述机器人,用于根据紫外光路径进行室内移动,具有包括红外避障、自动回充和远程语音的功能。
42、本发明的有益效果在于:通过紫外隐形笔设置好机器人的行动路线,利用紫外灯照射前方地面形成紫外路径,通过摄像头采集包括紫外光路径的图像,,即原图像iorg然后计算模块对原图像iorg进行紫外路径特征提取获取紫外路径变化情况,从而控制机器人移动。通过紫外光束照射形成路径的方法具备简单、循迹可靠性高和软硬件成本低的优点;基于紫外光束照射形成路径的方法具有可重复擦除、重新规划路径的优点,与基于黑白路标循迹方法相比,路面美观无痕迹残留,增强了机器人循迹的准确性。
- 还没有人留言评论。精彩留言会获得点赞!