一种基于智能优化算法的车载网络故障诊断方法
1.本发明涉及故障诊断技术领域,具体涉及一种基于智能优化算法的车载网络故障诊断方法。
背景技术:
2.车载网络是将车辆平台内的子系统、设备、模块和部件连接起来的纽带,它是实现车辆综合电子系统的一项核心支撑技术,被认为是车辆平台的“中枢神经”。但是,现行的车载网络故障诊断仍旧大多依赖人工经验排查,往往难以有效诊断出故障原因。在车载网络中,不同的故障类型和故障位置往往导致不同程度的网络物理层波形信号畸变;而波形信号的畸变又将直接导致网络误码和丢包,影响车辆网络化控制系统的控制性能。因此,基于网络物理层波形提取的网络状态特征,并结合网络链路层数据构建特征向量,可以有效表征各类故障模式,从而将车载网络的故障诊断转变为模式识别问题。
3.支持向量机(support vector machine,svm) 作为机器学习的研究内容之一,在网络故障诊断等领域中运用非常广泛的一种识别方法。例如,董超等人基于物理层信号提出一种基于支持向量机的mac协议识别方法 (董超 , 王蔚峻 , 李艾静 , 于卫波 , 王海.基于支持向量机的mac协议识别方法[p]. 江苏省:cn107231427b,2020-04-07.);王立德等人将svm引入列车通信网络实时状态感知与故障诊断中,构建列车通信网络诊断模型,有效的实现列车通信网络的故障诊断(王立德;申萍;聂晓波;李召召;杜晓敏;宋辉.一种基于机器学习的列车通信网络故障诊断方法[p]. 北京市:cn111988192a,2020-11-24.);向诗晗等人提出采用鸽群算法训练优化svm模型,进而实现网络故障诊断(向诗晗;徐萍;石才;张旭;胡翔;张磊;余军;彭先军.基于鸽群算法优化支持向量机的网络故障预测方法及系统[p]. 湖北省:cn109391515a,2019-02-26.)。
[0004]
在svm训练过程中,svm的惩罚因子c和rbf核函数参数g的选择质量,直接影响最终的故障诊断结果。智能优化算法是一种有效svm模型参数优化方法。乌燕鸥优化算法(sooty tern optimization algorithm,stoa)是一种模拟乌燕鸥觅食行为的新型智能优化算法,同样可以应用于车载网络故障诊断问题。但是,乌燕鸥优化算法存仍然存在有一些缺陷,使得算法容易陷入局部最优和收敛精度不高,在进行网络故障诊断时,往往达不到理想的故障诊断效果。
技术实现要素:
[0005]
为解决上述问题,本发明提供一种基于智能优化算法的车载网络故障诊断方法,克服了乌燕鸥优化算法存在的几点不足,能够显著提升车载网络故障诊断故障诊断的效果。
[0006]
为实现上述目的,本发明提供了如下的技术方案。
[0007]
一种基于智能优化算法的车载网络故障诊断方法,包括以下步骤:提取待诊断的车载网络故障原始数据中的故障特征;
将5折交叉验证svm的分类准确率作为目标函数,并确定惩罚因子c和rbf核函数参数g的上下限;基于乌燕鸥算法,通过高斯映射初始化乌燕鸥种群位置,即初始化每个乌燕鸥对应的惩罚因子c和核函数参数g,并根据目标函数,计算最优适应度值和最优乌燕鸥位置;引入交流学习机制,与种群内部的其他乌燕鸥进行交流学习来更新自身的位置,以改进原乌燕鸥算法的位置更新方式;对最优乌燕鸥位置进行双向sine变异,将变异前后适应度值最优的乌燕鸥位置,作为更新后的最优乌燕鸥位置;根据预设的最大迭代次数依次更新最优乌燕鸥位置,确定最优乌燕鸥位置,即获得对应最优的惩罚因子c和核函数参数g;将最优的惩罚因子c和核函数参数g作为svm模型参数构建车载网络故障诊断模型;将车载网络故障诊断的特征向量,输入到训练后的车载网络故障诊断模型,获得故障诊断结果。
[0008]
优选地,所述通过高斯映射初始化乌燕鸥种群位置,包括以下步骤:确定种群的大小n,乌燕鸥寻优下边界lb和乌燕鸥寻优上边界ub;通过高斯映射产生随机数x
t
:式中,mod(
·
)为求余函数,x
t+1
为下一个随机数;利用产生的高斯随机数初始化乌燕鸥位置:。
[0009]
优选地,所述引入交流学习机制,与种群内部的其他乌燕鸥进行交流学习来更新自身的位置,包括以下步骤:冲突避免:模拟乌燕鸥的冲突避免行为过程,用如下公式表达:式中:表示当前第t次迭代的乌燕鸥的位置;表示的是在不与其他乌燕鸥碰撞的情况下乌燕鸥的新位置;代表一个避免碰撞的变量因素,用来计算避免碰撞后的位置,它的约束条件公式如下:式中:为用来调整的控制变量;t表示当前迭代次数;随着迭代次数的增加,从逐渐减小为0;如假设为2,将从2逐渐减小为0;为迭代次数;聚集:聚集是指当前乌燕鸥在避免冲突的前提下向相邻乌燕鸥中最好的位置靠拢,也就是向最优位置靠拢,其数学表达式如下:
式中:是第t次迭代乌燕鸥的最优位置;表示在不同位置向最优位置移动的过程;是一个使勘探更加全面的随机变量,按照以下公式变化:式中:为[0,1]范围内的随机数;更新:更新是指当前乌燕鸥朝着最优位置的所在方向进行移动,更新位置,其数学表达式为:+式中:是乌燕鸥从当前位置向最优位置方向移动的距离;攻击行为:在迁移过程中,乌燕鸥可以通过翅膀提高飞行高度,也可以调整自身的速度和攻击角度,在攻击猎物的时候,它们在空中的盘旋行为可定义为以下数学模型:式中:是每个螺旋的半径;是[0,2π]范围内的随机角度值;u和v是定义螺旋形状的相关常数,均可设定为1;e是自然对数的底数;引入交流学习机制,与种群内部的其他乌燕鸥进行交流学习来更新自身的位置:其中,r1和r2为随机学习权重能够调节乌燕鸥的向最优乌燕鸥学习和种群内部其他乌燕鸥学习的影响,总和为1;表示第t次迭代的最佳位置;表示从乌燕鸥种群内部挑选的其他乌燕鸥,k为[1,n]范围内的数;引入饥饿值概念,为整个种群的每个乌燕鸥都分配一个饥饿值,其代表乌燕鸥的生存能力,即获取食物的能力;饥饿值的数学定义如下:其中,f为计算适应度值时的适应度函数;和分别代表适应度函数的最佳值和最差值;饥饿值越低的乌燕鸥为最容易获取食物的能力就越强;当饥饿值大于0.3时,乌燕鸥的更新公式如下:式中:和为0到1之间的随机数;h和q为[1,n]范围内的数;和为第h和q个乌燕鸥的位置,r1≠r2;计算适应度值:
式中,为计算适应度值时的适应度函数;记录当次迭代中最优乌燕鸥。
[0010]
优选地,所述对最优乌燕鸥位置进行双向sine变异,包括以下步骤:对于维度j,根据当前迭代次数计算sine混沌值,并等概率切换正负方向:对于维度j,根据当前迭代次数计算sine混沌值,并等概率切换正负方向:式中,rand为0到1的随机数;x0为迭代序列值;对最优位置进行变异扰动:式中:表示第t+1次迭代的最优位置的第j维;贪婪更新:每个维度都进行变异后,停止变异。
[0011]
本发明的有益效果:本发明提出一种基于智能优化算法的车载网络故障诊断方法,该方法通过引入高斯映射进行乌燕鸥种群位置的初始化,可以提升种群位置分布的均匀性和多样性,进而算法的稳定性得以增强;该方法对乌燕鸥的位置更新方式进行了改进,乌燕鸥向最优乌燕鸥学习的同时,引入交流学习机制,与种群内部的其他乌燕鸥进行交流学习来更新自身的位置,实现了算法搜索范围的增大,算法的适应性得以增强。该方法对最优乌燕鸥利用双向sine混沌映射变异,实现了算法在后期跳出局部最优解的能力。
附图说明
[0012]
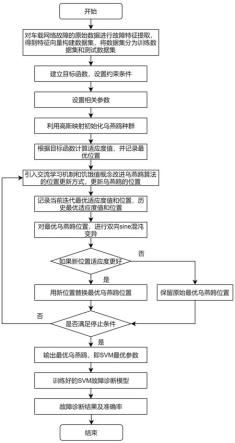
图1是本发明实施例的一种基于智能优化算法的车载网络故障诊断方法的流程图;图2是本发明实施例的一种基于智能优化算法的车载网络故障诊断方法的实验平台示意图;图3是本发明实施例的一种基于智能优化算法的车载网络故障诊断方法的诊断结果。
具体实施方式
[0013]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0014]
实施例1本发明的一种基于智能优化算法的车载网络故障诊断方法,针对stoa存在的几个
问题,提出改进型乌燕鸥优化算法(improve sooty tern optimization algorithm,istoa)优化svm并用于车载网络的故障诊断,基于智能优化算法的车载网络故障诊断方法的流程如图1所示,具体步骤如下:s1:对车载网络故障的原始数据进行故障特征提取,得到车载网络故障诊断的特征向量,构建车载网络故障诊断的数据集,将数据集分为训练数据集和测试数据集。
[0015]
建立基于改进型乌燕鸥优化算法优化svm的车载网络故障诊断的目标函数funtion。因为是利用训练数据集计算svm的分类准确率,所以可以将训练数据集的5折交叉验证svm的分类准确率作为目标函数,并确定svm模型的惩罚因子c和rbf核函数参数g的上下限。
[0016]
s3:参数设置。乌燕鸥种群的大小(即乌燕鸥个体的数量)n;迭代的最大次数(即迭代停止的条件)miter;乌燕鸥寻优下边界lb;乌燕鸥寻优上边界ub。
[0017]
s4:确定种群的大小n,乌燕鸥寻优下边界lb和乌燕鸥寻优上边界ub;引入高斯映射初始化乌燕鸥种群位置,包括以下步骤:确定种群的大小n,乌燕鸥寻优下边界lb和乌燕鸥寻优上边界ub;通过高斯映射产生随机数x
t
:式中,mod(
·
)为求余函数,x
t+1
为下一个随机数;利用产生的高斯随机数初始化乌燕鸥位置:。
[0018]
s5:冲突避免:模拟乌燕鸥的冲突避免行为过程,用如下公式表达:式中:表示当前第t次迭代的乌燕鸥的位置;表示的是在不与其他乌燕鸥碰撞的情况下乌燕鸥的新位置;代表一个避免碰撞的变量因素,用来计算避免碰撞后的位置,它的约束条件公式如下:式中:为用来调整的控制变量;t表示当前迭代次数;随着迭代次数的增加,从逐渐减小为0;如假设为2,将从2逐渐减小为0;为迭代次数;聚集:聚集是指当前乌燕鸥在避免冲突的前提下向相邻乌燕鸥中最好的位置靠拢,也就是向最优位置靠拢,其数学表达式如下:式中:是第t次迭代乌燕鸥的最优位置;表示在不同位置向最优位置移动的过程;是一个使勘探更加全面的随机变量,按照以下公式变化:
式中:为[0,1]范围内的随机数;更新:更新是指当前乌燕鸥朝着最优位置的所在方向进行移动,更新位置,其数学表达式为:+式中:是乌燕鸥从当前位置向最优位置方向移动的距离;攻击行为:在迁移过程中,乌燕鸥可以通过翅膀提高飞行高度,也可以调整自身的速度和攻击角度,在攻击猎物的时候,它们在空中的盘旋行为可定义为以下数学模型:式中:是每个螺旋的半径;是[0,2π]范围内的随机角度值;u和v是定义螺旋形状的相关常数,均可设定为1;e是自然对数的底数;原始乌燕鸥算法中,只利用全局最优乌燕鸥位置进行引导,来更新乌燕鸥位置,为了更加有效的提高乌燕鸥的全局搜索能力,乌燕鸥向最优乌燕鸥学习的同时,引入交流学习机制,与种群内部的其他乌燕鸥进行交流学习来更新自身的位置:其中,r1和r2为随机学习权重能够调节乌燕鸥的向最优乌燕鸥学习和种群内部其他乌燕鸥学习的影响,总和为1;表示第t次迭代的最佳位置;表示从乌燕鸥种群内部挑选的其他乌燕鸥,k为[1,n]范围内的数;引入饥饿值概念,为整个种群的每个乌燕鸥都分配一个饥饿值,其代表乌燕鸥的生存能力,即获取食物的能力;饥饿值的数学定义如下:其中,f为计算适应度值时的适应度函数;和分别代表适应度函数的最佳值和最差值;饥饿值越低的乌燕鸥为最容易获取食物的能力就越强;当饥饿值大于0.3时,乌燕鸥的更新公式如下:式中:和为0到1之间的随机数;h和q为[1,n]范围内的数;和 为第h和q个乌燕鸥的位置,r1≠r2。
[0019]
s6:计算适应度值。
[0020]
式中,为计算适应度值时的适应度函数;
s7:记录信息,记录当次迭代中最优乌燕鸥。
[0021]
s8:对最优乌燕鸥,进行逐维度双向sine变异。对于维度j。首先根据当前迭代次数计算sine混沌值。并等概率切换正负方向。ne混沌值。并等概率切换正负方向。
[0022]
式中,rand为0到1的随机数;x0为迭代序列值;对最优位置进行变异扰动:式中:表示第t+1次迭代的最优位置的第j维;贪婪更新:每个维度都进行变异后,停止变异。
[0023]
s9:记录信息,记录当次迭代中最优乌燕鸥。
[0024]
s10:重复执行s6~s9,根据预设的最大迭代次数依次更新最优乌燕鸥位置,确定最优乌燕鸥位置,即得到svm的最优参数。
[0025]
s11:将最优的惩罚因子c和核函数参数g作为svm模型参数构建车载网络故障诊断模型;将车载网络故障诊断的特征向量,输入到训练后的车载网络故障诊断模型,获得故障诊断结果和测试准确率。
[0026]
本实施例中:如图2所示为车载网络实验平台,该平台采用双总线拓扑结构,总线末端接端接器以防止阻抗不匹配而发生发射现象,网络上分别挂接车载网络协议分析仪1台、车载网络故障注入设备1台、网络节点6个等。在验证实验中,平台模拟车载网络6种典型状态,分别是:网络正常;网络断路;近端端接故障;远端端接故障;双侧端接故障;间歇性断路。
[0027]
采集车载网络每种状态 2000 组样本,并随机将其中1600组作为训练样本,剩余400组为测试样本。分别采用stoa-svm和istoa-svm对车载网络进行故障诊断。stoa算法中的参数为:n=50,maxiter=200,c和g的搜索范围均是在0-100 之间,即lb = 0,ub=100;istoa算法中的参数为:n=50,maxiter=200,c和g的搜索范围均是在0-100 之间,即lb = 0,ub=100。
[0028]
如图3所示,与stoa-svm比较,istoa-svm对车载网络的 6 种状态的独立诊断精度均要高些;对于平均诊断精度,istoa-svm相比于stoa-svm提高了6.27%。也就是说,istoa搜索得到的svm参数要优于stoa搜索得到的svm参数。仿真结果表明,istoa算法比stoa算法搜索能力更强,istoa-svm比stoa-svm的诊断精确度更高,验证了方法的有效性。
[0029]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1