用于机械传动系统复合故障识别的自适应信号降噪分解方法
1.本发明属于机械振动信号处理与故障诊断技术领域,更具体地说,涉及一种用于机械传动系统复合故障识别的自适应信号降噪分解方法。
背景技术:
2.机械传动系统是高端装备(航空发动机、直升机、轨道列车、风力发电机等)的重要组成部分,其运行可靠性与安全性问题始终是国内外学术界与工程界的关注焦点。齿轮、轴承等旋转部件是机械传动系统的关键基础件,在实际工作中往往面临重载、高速、高温等恶劣复杂的服役条件,极易出现故障。大量工程实践表明,机械故障大多表现为多种故障并存,即同时或级联发生相互关联和交叉影响的复合故障。因此,开展机械传动系统状态监测与复合故障诊断对于保障机械装备的服役安全具有重要意义。
3.振动信号是目前表征机械装备异常和故障的最敏感征兆量,具有良好的可解释性,且测试简单,基于振动信号的分析方法已经在机械故障诊断领域得到极为广泛的应用。然而,随着机械装备的复杂化程度日趋增加,机械传动系统的振动信号成分愈加复杂,且呈现出强非平稳和强非线性的特点,给传统的时域统计特征分析和频谱分析方法带来了巨大挑战。
4.将振动信号分解为若干个具有明确物理意义的子信号(即模态),是提取复杂机械传动系统故障特征并进行故障识别的有效途径。小波变换、经验模态分解、局部均值模态分解、经验小波变换、变分模态分解和特征模态分解等诸多方法已经在机械故障领域得到应用,并取得了丰富成果。然而,小波变换和经验小波变换受限于小波基的构造,无法实现信号的自适应分解;经验模态分解和局部均值模态分解由于采用递归迭代分解方式,始终无法避免端点效应和模态混叠等问题;变分模态分解虽然采用非递归分解方式,但其参数(模态个数和平衡参数)需要人为提前选取,不具备参数自适应性。特征模态分解作为一种新近提出的信号分解方法,充分考虑了机械故障的冲击性和循环平稳性,更适用于处理机械故障振动信号。然而,特征模态分解同样需要依赖人为经验提前设定参数(滤波器长度和模态个数),而不当的参数选取会显著降低其分解性能,同时该方法在齿轮和轴等部件在旋转运行过程中产生的强谐波干扰下容易出现故障漏诊问题,无法实现复合故障的有效准确识别。因此,亟需提出一种能够充分考虑机械传动系统复合故障振动信号特点的自适应信号降噪分解方法,实现机械传动系统复合故障的准确识别。
技术实现要素:
5.本发明提出一种用于机械传动系统复合故障识别的自适应信号降噪分解方法,克服了现行信号分解方法未充分考虑机械传动系统复合故障振动信号特点(多重冲击性、多循环平稳周期、强谐波干扰等)以及需要根据经验人为提前选取参数导致分解性能降低的诸多不足,能更为有效地实现机械传动系统复合故障的识别,在满足自适应分解特性的同时,极大地避免了复合故障漏诊或误诊问题。
6.本发明采用的技术方案是:
7.一种用于机械传动系统复合故障识别的自适应信号降噪分解方法,其特征在于,包括如下步骤:
8.步骤1、输入振动信号数据:将振动加速度传感器安装在被测试机械设备传动装置的外壳体上,采集得到机械传动系统原始振动信号,标记为x(n),其中,n=1,2,3,
…
,n为振动信号的采样点数序列,n为总采样点数即信号长度;
9.步骤2、去除谐波干扰:采用自回归(ar)模型估计原始振动信号x(n)中的谐波成分,并根据公式(1)计算得到去除谐波干扰后的ar降噪振动信号e(n),实现对原始振动信号的自适应降噪处理;
[0010][0011]
其中,a(p)是ar模型中第p阶系数,q是ar模型的阶数;
[0012]
步骤3、构造滤波器组并初始化:采用k个有限长单位冲激响应(fir)滤波器构造一个滤波器组{fk,k=1,2,3,
…
,k},其中,fk为第k个滤波器的向量表示形式,所述的滤波器组的具体构造形式为,将k个频带宽度均相等的滤波器,均匀分布于整个分析频带,且相邻2个滤波器所对应的频带宽度有50%的重合度;采用汉宁窗函数对所述的滤波器组进行初始化,设置滤波器组中k个滤波器的长度l均相等,滤波器长度范围为l∈[1,l
upper
];
[0013]
步骤4、滤波分解ar降噪振动信号e(n)得到模态uk:应用步骤3所述的滤波器组{fk}对ar降噪振动信号e(n)进行滤波,根据公式(2)采用特征矢量法分解得到k个模态{uk,k=1,2,3,
…
,k}:
[0014]
uk=εfkꢀꢀꢀ
(2)
[0015]
其中,uk为第k个模态的向量表示形式,fk为滤波器组中第k个滤波器的向量表示形式,e为用于特征矢量法求解而构造的ar降噪振动信号的toeplitz矩阵形式,分别表示如下:
[0016][0017]
步骤5、估计模态uk的故障周期tk:应用希尔伯特变换和自相关函数迭代估计模态uk的故障周期tk;
[0018]
步骤6、自适应迭代更新滤波器fk和模态uk:借助盲解卷积理论,以模态uk的相关峭度最大化作为滤波器fk自适应迭代更新的准则,根据ar降噪振动信号e(n)和步骤5所述的故障周期tk将模态uk的相关峭度构造成广义瑞利商形式,并通过求解广义特征值问题自适应更新滤波器fk和模态uk;
[0019]
步骤7、判断滤波器fk的迭代更新次数是否达到指定的迭代次数pre_iteration,如果是,得到最终更新后的模态uk,否则重复执行步骤4至步骤6;
[0020]
步骤8、模态选择:首先,计算自适应分解得到的每个模态的平方包络谐波噪声比、相关峭度和所有模态的相关峭度均值,将相关峭度低于均值的模态和平方包络谐波噪声比低于阈值sehnr_limit的模态去除;然后,计算剩余模态中每两个模态之间的多域相关性系
数(即时域相关系数、频谱正交性系数和平方包络谱正交性系数)和故障周期一致性系数,去除多域相关性系数高于阈值similarity_limit且故障周期一致性系数低于阈值period_limit的模态,保留剩余模态;
[0021]
步骤9、计算保留剩余模态的加权平方包络谐波噪声比,并判断滤波器长度l是否到达指定的长度范围上限l
upper
,如果是,执行步骤10,否则重复执行步骤4至步骤8;
[0022]
步骤10、获得最优滤波器长度和最优模态:选取当模态的加权平方包络谐波噪声比数值最大时所对应的滤波器长度作为最优滤波器长度,此时对应的模态即为最优模态;
[0023]
步骤11、复合故障特征分离提取与识别:对经过自适应降噪分解后获得的最优模态即子信号进行平方包络谱分析,将所有子信号从时域转换至包络谱域,分别得到所有子信号在平方包络谱上的频率分布情况,分离提取复合故障的特征频率,与机械传动系统关键部件的旋转特征频率进行比对,可最终检测出复合故障并识别出复合故障的位置。
[0024]
进一步,本发明所述的步骤1中,振动加速度传感器通常布置在机械设备传动系统滚动轴承处或靠近滚动轴承处的外壳体表面,被测设备传动系统部件包括滚动轴承和齿轮;
[0025]
进一步,本发明所述的步骤2中,ar模型的系数a(p)通过levinson-durban递归算法求解yule
–
walker方程计算获得,阶数q根据公式(4)自适应确定,即通过计算不同阶数下ar降噪振动信号e(n)的峭度值(kurtosis),自动选取与最大峭度值对应的阶数作为最优阶数:
[0026][0027]
其中,eq(n)代表阶数为q时的ar降噪振动信号,是eq(n)的均值,阶数q的取值范围为q∈[q
lower
,q
upper
]。
[0028]
进一步,本发明所述的步骤3中,第k个滤波器频带宽度的下截止频率f
lower,k
和上截止频率f
upper,k
的计算方式为:
[0029][0030]
其中,fs是原始振动信号的采样频率。
[0031]
进一步,本发明所述的步骤5具体包括如下步骤:
[0032]
步骤5.1、计算每个模态uk的平方包络信号u
k,se
:
[0033]uk,se
(n)=|uk(n)+j
·
hilbert{uk(n)}|2ꢀꢀꢀꢀ
(6)
[0034]
其中,hilbert{
·
}表示求希尔伯特变换,j为虚数单位。
[0035]
步骤5.2、计算每个模态的平方包络信号u
k,se
的自相关函数r
k,se
(τ):
[0036][0037]
其中,τ为偏移量,n为信号总采样点数,l为滤波器长度。
[0038]
步骤5.3、选择自相关函数r
k,se
(τ)中过零点位置后的极大值所对应的时序位置
τ
max
作为模态uk的故障周期tk:
[0039][0040]
进一步,本发明所述步骤6具体包括如下步骤:
[0041]
步骤6.1、借助盲解卷积理论,构造模态uk广义瑞利商形式的相关峭度:
[0042][0043][0044]
其中,ck(uk)表示模态uk的相关峭度,m为相关峭度的移位系数,wm为加权矩阵,r
xwx
为加权相关矩阵,r
xx
为相关矩阵,h为共轭转置符号。
[0045]
步骤6.2、求解广义特征值问题:
[0046]rxwxfk
=r
xxfk
λ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0047]
其中,λ为广义特征值,其最大值λ
max
与模态uk的最大相关峭度值对应。
[0048]
步骤6.3、自适应更新滤波器fk和模态uk:应用与最大广义特征值λ
max
对应的特征向量自适应更新滤波器fk,进而得到更新后的模态uk。
[0049]
进一步,本发明所述的步骤8具体包括如下步骤:
[0050]
步骤8.1、计算分解得到的每个模态的平方包络谐波噪声比sehnr和相关峭度ck:
[0051][0052][0053]
其中,r
k,se
(τ
max
)为模态uk自相关函数过零点位置后的极大值,r
k,se
(0)为模态uk自相关函数零点位置的值,m为相关峭度的移位系数,n为信号长度。
[0054]
步骤8.2、将平方包络谐波噪声比低于阈值sehnr_limit和相关峭度值低于所有模态相关峭度均值的模态去除;
[0055]
步骤8.3、计算剩余模态中每两个模态之间的多域相关性系数(即时域相关系数cc、频谱正交性系数so和平方包络谱正交性系数seso)和故障周期一致性系数ε
t
:
[0056]
[0057][0058][0059]
ε
t
=|t
p-tq|/t
p
ꢀꢀꢀꢀ
(17)
[0060]
其中,u
p
和uq分别是第p和q个模态,和分别是第p和q个模态的均值,s
p
和sq分别模态u
p
和uq的频谱,ses
p
和sesq分别是模态u
p
和uq的平方包络谱,t
p
和tq分别是模态u
p
和uq的估计故障周期。
[0061]
步骤8.4、判断每两个模态之间的多域相关性系数和故障周期一致性系数,去除多域相关性系数阈值高于similarity_limit且故障周期一致性系数低于阈值period_limit的模态,保留剩余模态。
[0062]
进一步,本发明所述的步骤10中,最优滤波器长度的计算方式如下:
[0063]
步骤10.1、计算当滤波器长度为l时最终剩余的kd个模态的加权平方包络谐波噪声比weighted sehnr
l
:
[0064][0065]
其中,sehnrk代表第k个剩余模态的平方包络谐波噪声比,kd代表最终剩余的模态个数。
[0066]
步骤10.2、计算不同滤波器长度下最终剩余的kd模态的加权平方包络谐波噪声比,自动选取与最大加权平方包络谐波噪声比对应的滤波器长度作为最优滤波器长度:
[0067][0068]
其中,l为滤波器长度,取值范围为[1,l
upper
],l
opt
为最优滤波器长度。
[0069]
本发明的有益效果在于:
[0070]
1.本发明所提出的一种用于机械传动系统复合故障识别的自适应信号降噪分解方法,将自回归(ar)模型和盲解卷积理论与自适应信号分解思想相结合,通过采用ar模型自适应去除齿轮和轴旋转运行产生的强谐波成分,极大避免了振动信号中强谐波成分对故障信息的干扰,有利于充分挖掘利用相关峭度对于故障信号冲击性和循环平稳性的兼顾表征特点;同时,采用具有频带重叠特点的滤波器组和以故障信号相关峭度作为目标函数的盲解卷积技术,无需复合故障多循环平稳周期(即故障周期)的先验知识且无需构造先验基函数,即可实现复合故障特征导向的振动信号自适应分解,能够实现机械传动系统复合故障的有效识别;
[0071]
2.本发明所提出的加权平方包络谐波噪声比(weighted sehnr)指标,充分考虑了复合故障振动信号的多重冲击性和多循环平稳周期的特点,可有效评估所有分解模态的故障信息,适用于复合故障特征检测;
[0072]
3.本发明所提出的多域相关性系数包含了时域相关系数和本发明所提出的频谱正交性系数与平方包络谱正交性系数,可从时域、频域和包络谱域三个维度综合考察分解模态的相关性,克服了传统方法仅依靠时域相关系数作为唯一相关性评估手段无法充分考虑故障振动信号特点且准确性低的不足,结合本发明所提出的故障周期一致性系数,可有效选取具有丰富故障特征信息的最优模态,避免因过分解或欠分解导致的模态冗余或故障特征信息丢失问题;
[0073]
4.本发明所提出的一种用于机械传动系统复合故障识别的自适应信号降噪分解方法,涉及到的主要参数即ar模型阶数、滤波器长度和模态个数均无需故障先验知识,可分别根据本发明所提出的基于峭度的ar模型阶数自适应确定准则、加权平方包络谐波噪声比指标、多域相关性系数和故障周期一致性系数实现参数自适应选取,克服了传统信号分解方法需要根据经验人为提前选取参数的不足,有效避免了因参数选取不当造成的故障漏诊或误诊问题,显著提高了复合故障诊断的准确性。
附图说明
[0074]
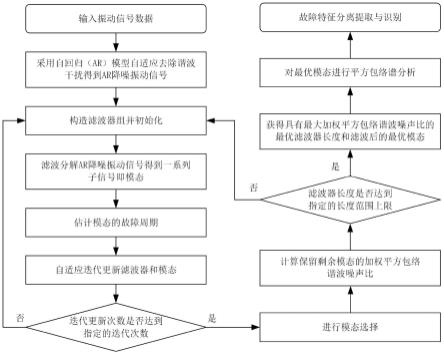
图1为本发明所提出方法的流程图;
[0075]
图2为本发明实施例中滚动轴承复合故障振动信号的时域波形图;
[0076]
图3为本发明实施例中滚动轴承复合故障振动信号的频谱图;
[0077]
图4为本发明实施例中滚动轴承复合故障振动信号经过本发明所提出方法降噪后所得信号的时域波形图;
[0078]
图5为本发明实施例中滚动轴承复合故障振动信号经过本发明所提出方法降噪后所得信号的频谱图;
[0079]
图6为本发明实施例中滚动轴承复合故障振动信号经过本发明所提出方法降噪分解后所得信号的时域波形图;
[0080]
图7为本发明实施例中滚动轴承复合故障振动信号经过本发明所提出方法降噪分解后所得信号的平方包络谱图。
具体实施方式
[0081]
本发明实施例所采用的机械传动系统振动信号来源于西安交通大学公开发布的xjtu-sy滚动轴承加速寿命试验数据集。滚动轴承振动信号由竖直布置在轴承处外壳体的振动加速度传感器获得,采样频率为25600hz,采样时长1.28s。测试滚动轴承的旋转轴输入转速为2250rpm(对应转频为37.5hz),径向负载为11kn,故障形式为同时出现外圈故障和保持架故障,故障特征频率分别为f1=116.41hz和f2=14.84hz。
[0082]
图1所示为本发明提出的一种用于机械传动系统复合故障识别的自适应信号降噪分解方法,其特征在于,包括如下步骤:
[0083]
步骤1、输入振动信号数据:将振动加速度传感器安装在被测试机械设备传动装置的外壳体上,采集得到机械传动系统原始振动信号,标记为x(n),其中,n=1,2,3,
…
,n为振动信号的采样点数序列,n为总采样点数即信号长度,在本实施例中,振动信号总采样点数n=32768,振动信号的时域波形如图2所示,振动信号的频谱如图3所示;
[0084]
步骤2、去除谐波干扰:采用自回归(ar)模型估计原始振动信号x(n)中的谐波成
分,并根据公式(1)计算得到去除谐波干扰后的ar降噪振动信号e(n),实现对原始振动信号的自适应降噪处理:
[0085][0086]
其中,a(p)是ar模型中第p阶系数,通过levinson-durban递归算法求解yule
–
walker方程计算获得;q是ar模型的阶数,根据公式(4)自适应确定,即通过计算不同阶数下ar降噪振动信号e(n)的峭度值(kurtosis),自动选取与最大峭度值对应的阶数作为最优阶数:
[0087][0088]
其中,eq(n)代表阶数为q时的ar降噪振动信号,是eq(n)的均值,阶数q的取值范围为q∈[q
lower
,q
upper
],在本实施例中,阶数q的取值范围为[20,200];ar降噪振动信号的时域波形如图4所示,ar降噪振动信号的频谱及其局部放大图如图5所示,与图2和图3所示的原始振动信号相比,经过ar降噪后,信号在频率范围为0—3000hz内的谐波成分得到显著去除(频谱幅值由图3所示的0.3g下降至图5所示的0.03g,时域幅值由图2所示的2g下降至图4所示的1g);
[0089]
步骤3、构造滤波器组并初始化:采用k个有限长单位冲激响应(fir)滤波器构造一个滤波器组{fk,k=1,2,3,
…
,k},其中,fk为第k个滤波器的向量表示形式,所述的滤波器组的具体构造形式为,将k个频带宽度均相等的滤波器,均匀分布于整个分析频带,且相邻2个滤波器所对应的频带宽度有50%的重合度;采用汉宁窗函数对所述的滤波器组进行初始化,设置滤波器组中k个滤波器的长度l均相等,滤波器长度范围为l∈[1,l
upper
];第k个滤波器频带宽度的下截止频率f
lower,k
和上截止频率f
upper,k
的计算方式为:
[0090][0091]
其中,fs是原始振动信号的采样频率,在本实施例中,滤波器组中的滤波器个数k=11,滤波器长度l的取值范围为[1,200],采样频率fs=25600hz;
[0092]
步骤4、分解ar降噪振动信号e(n)得到模态uk:应用步骤3所述的滤波器组{fk}对ar降噪振动信号e(n)进行滤波,根据公式(2)采用特征矢量法分解得到k个模态{uk,k=1,2,3,
…
,k}:
[0093]
uk=εfkꢀꢀꢀꢀꢀ
(2)
[0094]
其中,uk为第k个模态的向量表示形式,fk为滤波器组中第k个滤波器的向量表示形式,e为用于特征矢量法求解而构造的ar降噪振动信号的toeplitz矩阵形式,分别表示如下:
[0095][0096]
步骤5、估计模态uk的故障周期tk:应用希尔伯特变换和自相关函数迭代估计模态uk的故障周期tk;
[0097]
步骤5.1、计算每个模态uk的平方包络信号u
k,se
:
[0098]uk,se
(n)=|uk(n)+j
·
hilbert{uk(n)}|2ꢀꢀꢀꢀꢀ
(6)
[0099]
其中,hilbert{
·
}表示求希尔伯特变换,j为虚数单位。
[0100]
步骤5.2、计算每个模态的平方包络信号u
k,se
的自相关函数r
k,se
(τ):
[0101][0102]
其中,τ为偏移量,n为信号总采样点数,l为滤波器长度。
[0103]
步骤5.3、选择自相关函数r
k,se
(τ)中过零点位置后的极大值所对应的时序位置τ
max
作为模态uk的故障周期tk:
[0104][0105]
步骤6、自适应迭代更新滤波器fk和模态uk:借助盲解卷积理论,以模态uk的相关峭度最大化作为滤波器fk自适应迭代更新的准则,根据ar降噪振动信号e(n)和步骤5所述的故障周期tk将模态uk的相关峭度构造成广义瑞利商形式,并通过求解广义特征值问题自适应更新滤波器fk和模态uk;
[0106]
步骤6.1、借助盲解卷积理论,构造模态uk广义瑞利商形式的相关峭度:
[0107][0108][0109]
其中,ck(uk)表示模态uk的相关峭度,m为相关峭度的移位系数,wm为加权矩阵,r
xwx
为加权相关矩阵,r
xx
为相关矩阵,h为共轭转置符号,在本实施例中,相关峭度的移位系数m=1;
[0110]
步骤6.2、求解广义特征值问题:
[0111]rxwxfk
=r
xxfk
λ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0112]
其中,λ为广义特征值,其最大值λ
max
与模态uk的最大相关峭度值对应;
[0113]
步骤6.3、自适应更新滤波器fk和模态uk:应用与最大广义特征值λ
max
对应的特征向量自适应更新滤波器fk,进而得到更新后的模态uk。
[0114]
步骤7、判断滤波器fk的迭代更新次数是否达到预先指定的迭代次数pre_
iteration,如果是,得到最终更新后的模态uk,否则重复执行步骤4至步骤6,在本实施例中,迭代次数pre_iteration=8;
[0115]
步骤8、模态选择:首先,计算自适应分解得到的每个模态的平方包络谐波噪声比、相关峭度和所有模态的相关峭度均值,将相关峭度低于均值的模态和平方包络谐波噪声比低于阈值sehnr_limit的模态去除;然后,计算剩余模态中每两个模态之间的多域相关性系数(即时域相关系数、频谱正交性系数和平方包络谱正交性系数)和故障周期一致性系数,去除多域相关性系数高于阈值similarity_limit且故障周期一致性系数低于阈值period_limit的模态,保留剩余模态,在本实施例中,阈值sehnr_limit=0.5,阈值similarity_limit=0.7,阈值period_limit=0.01;
[0116]
步骤8.1、计算分解得到的每个模态的平方包络谐波噪声比sehnr和相关峭度ck:
[0117][0118][0119]
其中,r
k,se
(τ
max
)为模态uk自相关函数过零点位置后的极大值,r
k,se
(0)为模态uk自相关函数零点位置的值,m为相关峭度的移位系数,n为信号长度。
[0120]
步骤8.2、将平方包络谐波噪声比低于阈值sehnr_limit和相关峭度值低于所有模态相关峭度均值的模态去除;
[0121]
步骤8.3、计算剩余模态中每两个模态之间的多域相关性系数(即时域相关系数cc、频谱正交性系数so和平方包络谱正交性系数seso)和故障周期一致性系数ε
t
:
[0122][0123][0124][0125]
ε
t
=|t
p-tq|/t
p
ꢀꢀꢀꢀꢀ
(17)
[0126]
其中,u
p
和uq分别是第p和q个模态,和分别是第p和q个模态的均值,s
p
和sq分别模态u
p
和uq的频谱,ses
p
和sesq分别是模态u
p
和uq的平方包络谱,t
p
和tq分别是模态u
p
和uq的估计故障周期。
[0127]
步骤8.4、判断每两个模态之间的多域相关性系数和故障周期一致性系数,去除多域相关性系数阈值高于similarity_limit且故障周期一致性系数低于阈值period_limit的模态,保留剩余模态。
[0128]
步骤9、计算保留剩余模态的加权平方包络谐波噪声比,并判断滤波器长度l是否
到达预先指定的长度范围上限l
upper
,如果是,执行步骤10,否则重复执行步骤4至步骤8,在本实施例中,滤波器长度范围上限l
upper
=200;
[0129]
步骤10、获得最优滤波器长度和最优模态:选取当模态的加权平方包络谐波噪声比数值最大时所对应的滤波器长度作为最优滤波器长度,此时对应的模态即为最优模态;
[0130]
步骤10.1、计算当滤波器长度为l时最终剩余的kd个模态的加权平方包络谐波噪声比weighted sehnr
l
:
[0131][0132]
其中,sehnrk代表第k个剩余模态的平方包络谐波噪声比,kd代表最终剩余的模态个数。
[0133]
步骤10.2、计算不同滤波器长度下最终剩余的kd模态的加权平方包络谐波噪声比,自动选取与最大加权平方包络谐波噪声比对应的滤波器长度作为最优滤波器长度:
[0134][0135]
其中,l为滤波器长度,取值范围为[1,200],l
opt
为最优滤波器长度,本实施例中,求解结果为:分解得到的最终模态个数kd=2,最优滤波器长度l
opt
=156;
[0136]
步骤11、复合故障特征分离提取与识别:对经过自适应降噪分解后获得的最优模态即子信号进行平方包络谱分析,本实施例中,最优模态个数为2,分别记作模态#1和模态#2,模态#1和模态#2的时域波形如图6所示,将2个模态从时域转换至包络谱域,分别得到2个模态在平方包络谱上的频率分布情况,如图7所示,本实例中的滚动轴承外圈故障特征频率为f1=116.41hz,与图7中模态#1所包含的故障特征频率f1及其倍频2x,3x,
…
,比对一致,滚动轴承保持架的故障特征频率为f2=14.84hz,与图7中模态#2所包含的故障特征频率f2及其倍频2x,3x,
…
,比对一致,两种故障特征可分别通过模态#1和模态#2进行识别,同时,保持架的故障特征频率会对外圈故障特征频率进行调制,因此在图7所示的模态#1中,除了包含明显的外圈故障特征频率f1及其倍频外,还出现了保持架故障特征频率f2及f1+f2,符合滚动轴承故障振动信号的调制机理,验证了本发明提出方法对于检测复合故障并识别出复合故障位置的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1