一种无人机测控链路盲区综合智能分析系统及方法与流程
本发明属于航空航天,涉及一种无人机测控链路盲区综合智能分析系统及方法。
背景技术:
1、大中型无人机测控天线装机后的辐射特性不可避免地会受到机体的遮挡、反射等影响,导致无人机在某些飞行位置或姿态下产生通信盲区,因此在无人机测控天线装机布局设计时应进行盲区分析,尽量减少机体对天线影响导致的盲区。
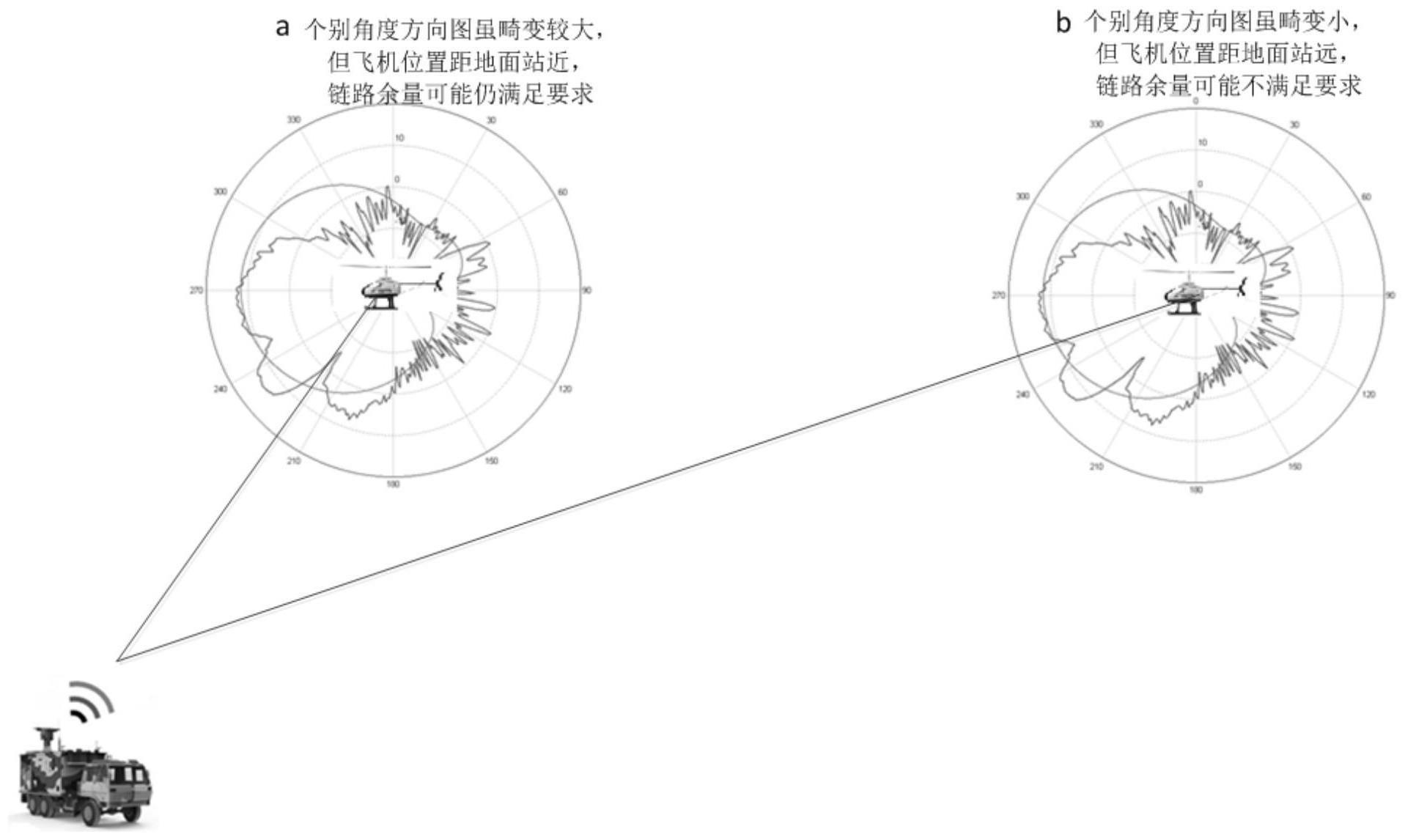
2、目前常用的盲区分析方法是根据电磁仿真软件仿得的天线装机三维电磁辐射方向图畸变程度大致判定盲区角度和范围。但在实际工程应用中,并非大幅畸变都对正常通信产生影响,应结合畸变方向角上无人机与地面站的距离、无人机的姿态等多种因素综合计算链路电平余量,余量不足方为通信盲区,电磁仿真结果并不能直接准确表征盲区范围,参见图1。链路在不同频点下的天线三维辐射方向图均有差异,要将天线装机后三维空间内各使用频点上方向图畸变的角度均进行链路电平计算,工作量十分庞大,手动计算难以实现,目前多数情况仅能简单基于天线装机三维电磁辐射方向图进行粗放式目测盲区判断,这种盲区判断方式准确度低,且无法识别全部盲区情况。
技术实现思路
1、发明目的:提供一种无人机测控链路盲区综合智能分析系统及方法。本发明能对无人机在全运动域范围内各种姿态下的链路余量及盲区进行自动计算及评估,支撑无人机机载天线布局设计和数据链指标设计。
2、技术方案:一种无人机测控链路盲区综合智能分析系统,包括天线电磁仿真模块、无人机运动建模模块和盲区综合智能分析模块;天线电磁仿真模块的作用是:基于机体结构模型、天线布局位置、天线电磁模型、伺服特性模型,仿真得出天线装机三维辐射方向图;无人机运动建模模块的作用是:基于无人机飞行平台高度区间、飞行距离区间以及飞行平台滚转、俯仰、航向姿态区间,构建飞行平台通视运动剖面模型和飞行平台运动姿态模型;盲区综合智能分析模块的作用是:基于天线装机三维辐射方向图、飞行平台通视运动剖面模型、飞行平台运动姿态模型,解算飞行平台运动剖面内各位置点上单副天线的通信覆盖盲区情况。
3、前述的无人机测控链路盲区综合智能分析系统中,所述的盲区综合智能分析模块的作用还包括:根据飞行平台运动剖面内各位置点上单副天线的通信覆盖盲区情况,解算单条测控链路上所有天线的通信覆盖情况,进而综合评估单链路的通信盲区范围。
4、前述的无人机测控链路盲区综合智能分析系统中,所述的盲区综合智能分析模块的作用还包括:根据单条测控链路上所有天线的通信覆盖情况,解算各余度测控链路的通信覆盖情况,进而综合评估飞行平台上多测控链路余度备份下的通信盲区范围及安全余度指示。
5、前述的无人机测控链路盲区综合智能分析系统的使用方法,包括下述步骤:
6、步骤一:天线电磁仿真模块基于机体结构模型、天线布局位置、天线电磁模型、伺服特性模型,仿真得出天线装机三维辐射方向图;
7、步骤二:无人机运动建模模块基于无人机飞行平台高度区间、飞行距离区间以及飞行平台滚转、俯仰、航向姿态区间,构建无人机运动模型,包括飞行平台通视运动剖面模型和飞行平台运动姿态模型;
8、步骤三:盲区综合智能分析模块对天线装机仿真方向图进行修整,便于后续用于盲区解算;
9、步骤四:盲区综合智能分析模块基于天线综合三维辐射方向图、飞行平台通视运动剖面模型、飞行平台运动姿态模型,解算飞行平台运动剖面内各位置点上单副天线的通信覆盖盲区情况;
10、步骤五:盲区综合智能分析模块依据单条测控链路上所有天线的通信覆盖情况,综合评估单链路的通信盲区范围;
11、步骤六:盲区综合智能分析模块依据各余度测控链路的通信覆盖情况,综合评估飞行平台上多测控链路余度备份下的通信盲区范围及安全余度指示。
12、前述的无人机测控链路盲区综合智能分析系统的使用方法中,步骤一中,天线装机三维辐射方向图中的天线包括全向天线,全向天线的天线装机三维辐射方向图的仿真方法为:在链路频段范围内设置若干频点进行天线装机三维辐射方向图仿真。
13、前述的无人机测控链路盲区综合智能分析系统的使用方法中,步骤一中,天线装机三维辐射方向图中的天线还包括定向天线,定向天线的天线装机三维辐射方向的仿真方法为:在定向伺服转动范围内设置若干方向、链路频段范围内设置若干频点,每个方向分别按设置频点进行天线装机三维辐射方向图仿真。
14、前述的无人机测控链路盲区综合智能分析系统的使用方法中,步骤二中,无人机运动模型的构建具体如下:
15、在平台飞行高度及距离区间内,根据无线通视计算公式求解飞行平台的通视运动范围剖面,式中h1、h2分别为机载及地面天线的高度,d0 为通视距离;
16、基于飞行平台通视运动范围剖面,按设定密度划分飞行平台相对地面站的位置网格,全部位置点构成飞行平台通视运动剖面模型;
17、基于飞行平台滚转、俯仰、航向区间,按设定密度取若干飞行姿态,全部姿态构成飞行平台运动姿态模型。
18、前述的无人机测控链路盲区综合智能分析系统的使用方法中,步骤三具体如下,
19、对于全向天线,将各频点装机三维辐射方向图求解交集,修整得全向天线装机综合三维辐射方向图,表征频段范围内天线最差三维辐射增益情况;
20、前述的无人机测控链路盲区综合智能分析系统的使用方法中,步骤三具体如下,
21、对于定向天线,将同一伺服方向上各频点装机辐射方向图求解交集,修整得该伺服方向上的天线装机综合辐射方向图,表征频段范围内该伺服方向上天线最差辐射增益情况;进一步将各伺服方向上的天线装机综合辐射方向图求解并集并适当插值,修整得定向天线伺服全范围的装机综合三维辐射方向图。
22、前述的无人机测控链路盲区综合智能分析系统的使用方法中,步骤四具体为:
23、①求解飞行平台在通视运动剖面内某位置点时相对地面站的距离及仰角度数;
24、②基于飞行平台运动姿态模型和单副天线综合三维辐射方向图,提取该位置点上无人机各种姿态下相对地面站方向的天线增益值;
25、③根据链路电平余量计算公式p=p+gt-pl+gr-lc-pr求解某位置点上各种姿态下的下行链路余量,式中pt发射功率、gr对端接收天线增益、lc综合损耗、 pr对端接收机灵敏度为链路已知属性,gt发射天线增益取自分步骤②算得,pl 自由空间损耗依据分步骤①通信距离算得;上行链路余量可同理算得;
26、④该位置点上各种姿态下算得的上下行链路电平余量均大于国军标要求的 6db,则判该位置为正常通信点,否则判该位置为盲点,并可依据该位置点上链路电平余量小于6db的姿态百分比及具体姿态,给出该位置点的盲度及避飞姿态建议;
27、⑤按照分步骤①-④,遍历计算飞行平台通视运动剖面模型内所有位置点的盲度,求解所有盲点的集合即为该天线在通视运动剖面上的盲区,其余区域为正常通信覆盖区域;
28、⑥对天线在平台通视运动剖面内的盲区及正常通信覆盖区进行可视化呈现。
29、有益效果:本发明综合无人机天线装机综合三维辐射方向图、视距通信范围、运动剖面范围、运动姿态范围等进行盲区分析,可精准、全面、快速地评估无人机全运动域及姿态范围内链路余量是否符合最低限值要求,从而最大程度反映实装装备的信号盲区范围,进而指导无人机方案设计初期天线的布局设计及链路指标设计的优化迭代,最大限度地将盲区控制在可接受范围;同时,本发明提供的盲区姿态规建议和天线切换建议、链路余度指示能为无人机相关使用手册的编制、操作人员航路预规划等提供有效依据。本发明与传统盲区分析方法的效果对比分析如下:
30、①以图1某定向天线伺服水平转动角0度方向上的电磁仿真方向图举例分析,仅依据天线装机三维电磁辐射方向图畸变程度判定盲区时,认为图中a情况下天线方向图畸变较大,通信不佳,认为图中b情况下天线方向图畸变较小,通信影响不大。但实际由于a情况下无人机相对地面控制站仰角较高,受限于无人机的最大飞行高度,该仰角下机地距离相对近,pl自由空间损耗相对小,反之b情况所示仰角下机地距离相对远,pl自由空间损耗相对大,根据链路电平余量计算公式p=p+gt-pl+gr-lc-pr求解,得到a情况下链路电平余量远大于6db,可正常通信,而b情况下链路电平余量小于6db,通信可能受到影响,因此,仅通过天线装机三维电磁辐射方向图粗略判断盲区,可能得出错误的结论;如进一步引入公式手动计算,应计算无人机相对地面控制站仰角0°-90°范围内所有主要畸变仰角上的电平余量,计算过程需人工识别方向图上所有畸变方向的天线增益,并结合无人机升限计算所有畸变方向上的最大可能距离,进一步依据自由空间损耗与距离的关系公式求得自由空间损耗,再将天线增益和空间损耗代入电平计算公式进行计算,当畸变图形较复杂时,手动计算量十分庞大,而本发明通过机器识别三维电磁辐射方向图中的各畸变仰角并读取相应角度下的天线增益,利用机器计算进行自由空间损耗及链路电平计算,从而精准快速地判断该伺服方向上的通信盲区。
31、②测控链路工作在一定频段范围内,包括若干工作频点,不同频点上的天线装机仿真方向图均有差别;另外定向伺服天线的伺服方位角指向不同时,机体对天线辐射特性的影响程度不同,天线装机仿真方向图亦有很大差异,上述①中所描述仅为定向天线在特定伺服方向上、特定频点上的盲区计算,要计算各频点、各伺服角度上的全部盲区情况,手动计算难以实现,本发明采取机器计算的同时,通过步骤三所述修整策略对天线装机仿真方向图进行智能修整,将各频点、各伺服角度上的方向图融合形成天线装机综合三维辐射方向图,进一步提升机器计算效率。
32、③传统的盲区分析,基本不考虑飞行平台的姿态,默认在平飞情况下进行分析,但是飞行平台的俯仰、滚转姿态动作带动机上天线同步运动,天线对地通信角度上的增益发生变化,盲区情况亦会随之产生变化,本发明采取步骤二所述方法,构建综合视距通信范围、运动剖面范围、运动姿态范围的飞行平台运动姿态模型,以全面计算无人机全运动域的盲区情况;
33、得益于机器计算的全面性,本发明在基础盲区分析的基础上,衍生盲区姿态规建议、天线切换建议、链路余度指示等功能,进而指导用户使用手册对无人直升机可能出现通信盲区位置和姿态进行说明,用户可尽量规避或制定相应的处置预案,对可预测的通信失效做好充足准备。
- 还没有人留言评论。精彩留言会获得点赞!