一种基于GPS和抽样调查的卡车货运活动模式估计方法
一种基于gps和抽样调查的卡车货运活动模式估计方法
技术领域
1.本发明属于物流网络规划领域,具体涉及一种基于gps和抽样调查的卡车货运活动模式估计方法。
背景技术:
2.工业原材料和商品的高效流动对一个国家的发展至关重要。近年来,由于信息技术的进步、消费者购物习惯的改变(如网上购物)以及行业物流的变化(如jit配送),全球化日益增长,原材料和商品的移动在数量和距离上都有所增加,货运数量和规模大幅增长。此外,在过去的几十年里,这些货物运输在特征和行为方面也发生了很大的变化。为了更好地适应快速变化的货运需求、服务国家的经济增长,优化设计与货运相关的基础设施和物流供应链网络至关重要。货运基础设施和供应链网络的规划设计的成功在很大程度上依赖于对货运需求模式和相应货运活动地点的理解与统计分析。
3.以往的大多数研究在确定卡车行程模式和货运活动时多采用针对司机的抽样调查方法,然而,抽样调查需要较高的人力和成本投入,难以获取大规模可靠数据。近年来,有研究基于卡车gps数据,通过简单的基于规则的启发式算法或机器学习算法(如随机森林、支持向量机等)来预测活动类型;然而,此类研究尚未考虑卡车在具体停车点的活动模式特征(如活动持续时间)以及卡车所载的商品类型,难以得到卡车货运活动特征的统计规律和不同活动之间的行车状态,并且,仅仅基于gps的活动模式估计精度较低,需要进一步通过抽样调查获取真实的活动模式样本数据,并据此修正基于gps数据所估计得到的活动模式的精度,从而为基础设施规划和设计提供有效的指引。
技术实现要素:
4.为了解决上述背景技术提到的技术问题,本发明提出了一种基于gps和抽样调查的卡车货运活动模式估计方法。
5.为了实现上述技术目的,本发明的技术方案为:
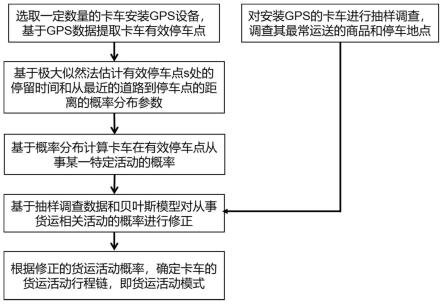
6.一种基于gps和抽样调查的卡车货运活动模式估计方法,包括以下步骤:
7.s1、通过gps跟踪系统获取每一辆卡车i的gps数据,包括时间戳、速度v和经纬度,将采集到的gps数据定义为时间戳、速度v和相应经纬度的有序集合;
8.s2、利用最小停留时间和最小行驶距离来确定卡车i的有效停车点s,对卡车进行抽样调查,确定卡车停留的位置及执行的活动;
9.s3、根据步骤s1中获取的卡车gps数据,计算每一辆卡车i在步骤s2中获取的有效停车点s的停车时间以及从最近的主要道路到该停车点的距离,每一辆卡车在所有的停车点位置和停车时间的组成的序贯集合称为行程链,去除不同卡车的重复行程链后,所有行程链为集合e;
10.s4、假设卡车在有效停车点s处的停留时间和从最近的道路到停车点的距离分别服从对数正态分布,基于极大似然法估计两个对数正态分布的均值以及标准差;
11.s5、基于步骤s4中估计得到的对数正太分布参数和卡车在有效停车点的相关位置数据,计算卡车有效停车点从事活动的类别和概率;
12.s6、基于抽样调查数据和贝叶斯模型,进一步修正步骤s5中卡车在停车点从事步骤s5中特定活动的概率;
13.s7、根据步骤s6中修正后的概率,确定携带商品c的卡车i的行程链集合即为与货运相关的活动模式。
14.优选地,步骤s2具体包括以下步骤:
15.s21、删除步骤s1中获取的gps数据不完整的卡车,将每辆卡车的原始gps数据按其时间戳的先后进行排列,将卡车从速度v》0的运行阶段变为速度v=0的静止阶段的时间戳定义为在停车点停止的开始时间,从静止阶段变为运行阶段的时间戳定义为在停车点停止的结束时间,进而确定任意两个连续的gps数据点之间时间的差值,根据经纬度的变化确定距离的差值;
16.s22、使用最小停留时间和最小行驶距离来确定卡车有效停车点,如果卡车i在停车点的开始时间和结束时间的差值大于最短停留时间y
min
,则认为该停车点是一个有效停车点s,如果小于最短停留时间y
min
,则认为该停车点不是有效停车点,在有效停车点s的基础上,采集卡车i行驶到下一停车点s+1经过的距离,如果这段距离大于最小行驶距离d
min
,那么判定s+1是一个新的潜在停车点,否则判定s+1是和s相同的有效停车点,对于新的潜在停车点,再利用最短停留时间进行判断,以此类推,直至获取所有卡车的有效停车点;
17.s23、通过步骤s22,可以得到有效停车点s的集合,对于每个有效停车点s,取开始时间和结束时间的差值为停车时间,取该段时间内经纬度的平均值作为s的位置;
18.s24、将卡车i的有效停车点按时间顺序进行整理,形成的序贯集合为卡车i的行程链;
19.s25、对所研究的装有gps卡车进行抽样调查,确定被调查卡车的有效停车点的位置及执行的活动,以改善后续活动估计。
20.优选地,步骤s3包括以下步骤:
21.s31、记卡车i在有效停车点s处的活动为a
i,s
,卡车i的活动集合为ai,y
i,s
为根据gps数据计算的卡车i在停车点s的停留时间,x
i,s
为卡车i在停车点s的停留时从最近的主要道路到停车点s的距离;
22.s32、定义指标变量如果卡车i停在有效停车点s并执行货运相关活动f,那么反之假设卡车i执行活动f的车辆停留时间yf和从最近的主要道路到潜在停车点的距离xf独立且服从对数正态分布,公式表达如下:
23.lnyf~n(μ
y,f
,(σ
y,f
)2)
ꢀꢀꢀꢀꢀꢀꢀ
(1)
24.lnxf~n(μ
x,f
,(σ
x,f
)2)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
25.其中,lnyf和lnxf分别为yf和xf的对数,n表示正态分布,μ
y,f
,σ
y,f
为车辆停留时间yf所服从对数正态分布的均值和标准差,μ
x,f
,σ
x,f
为从最近的主要道路到潜在停车点的距离xf所服从对数正态分布的均值和标准差,yf和xf的联合概率密度函数公式表达如下:
26.27.其中,λ=(μ
y,f
,μ
x,f
,σ
y,f
,σ
x,f
),m为gps数据中所有卡车的数量,si为卡车i经过有效停车点的数量,fs为卡车在有效停车点s处的所有可行活动的集合(包括货运相关活动与非货运相关活动);
28.yf和xf的概率密度函数公式表达如下:
[0029][0030][0031]
其中,h(μ
y,f
,σ
y,f
|y
i,s
)为随机变量yf的概率密度函数,g(μ
y,f
,σ
x,f
|x
i,s
)为随机变量xf的概率密度函数;
[0032]
对联合概率密度函数取对数,得到对数似然函数公式表达如下:
[0033][0034]
s33、根据步骤s31中获取的卡车i在停车点s处的停留时间y
i,s
和从最近的道路到停车点的距离x
i,s
以及活动指标通过极大化上述对数似然函数值可以估计得到模型的参数
[0035]
优选地,步骤s4中,确定卡车i在有效停车点s处执行活动f的概率的公式表达如下:
[0036][0037]
其中λ
*
为权利3中估计得到的模型参数,y
i,s
,x
i,s
分别为gps数据中获取的卡车i执行活动f的车辆停留时间和从最近的主要道路到潜在停车点的距离;
[0038]
由于卡车i在有效停车点s并执行活动f的变量的取值为0或1,因此公式(7)可进一步表示为:
[0039][0040]
由于卡车i在有效停车点s执行活动f相互独立,因此根据概率密度函数将公式(8)进一步表示为:
[0041][0042]
其中,为车辆i在停车点s执行活动f的停留时间和从最近的主要道路到潜在停车点的距离所服从的对数正态分布的均值和方差,通过步骤s33估计得到,活动f包含在步骤s41中定义的集合fs内,类似的,为车辆i在停车点s执行活动j的停留时间和从最近的主要道路到潜在停车点的距离所服从的对数正态分布的均值和方差,通过步骤s33估计得到,
[0043]
令对公式(9)取argmax函数,公式表达如下,得到估计的卡车i停在有效停车点s执行的活动a
i,s
:
[0044][0045]
其中,m为数据中所有卡车的数量,si为卡车i经过有效停车点的数量。
[0046]
优选地,步骤s5具体包括以下步骤:
[0047]
当卡车i的停车点在某一区域l内时,其在停车点s执行活动f的概率公式表达如下:
[0048][0049]
其中为卡车i在有效停车点s执行活动f的概率,pr(i,s,f
′
)为卡车i在有效停车点s执行活动f
′
的概率,pr(l|f
′
)为卡车i假设执行活动f
′
时在区域l停留的概率,pr(l|f)为卡车i假设执行活动f时在区域l停留的概率,pr(l|f)公式表达如下:
[0050][0051]
其中,o
f,l
为在被调查位置l∈l处停车执行活动f的卡车数量,o
f,l
′
为在l
′
∈l处停车执行活动f的卡车数量,l为进行抽样调查得到的卡车密度高的停车区域的集合。
[0052]
优选地,步骤5中卡车在有效停车点从事的活动分为两类,其中货运相关活动包括装货和卸货;非货运相关活动包括中途停车休息、用餐和加油。
[0053]
优选地,步骤s7具体包括以下步骤:
[0054]
s61、基于对卡车进行的抽样调查,获取所调查的卡车i的行程链集合ξi,确定所有与货运相关的活动f;
[0055]
s62、如果ξi在已知行程链集合e内,则可以确定该车所载的商品类型c,否则,将行程链集合ξi对应的停车点位置匹配相应的gis地理位置,根据地理位置属性确定其所运送的商品类型c;
[0056]
s63、根据确定的商品类型c以及卡车行程链集合ξi,对已知行程链集合e进行更新,同时,根据携带商品c的卡车i的行程链集合后,即可以确定与货运相关的活动模式等。
[0057]
采用上述技术方案带来的有益效果:
[0058]
本发明方法综合运用了包括gps和抽样调查数据在内的多元数据,分析更可靠,有助于深化对货运需求模式和相应活动地点的理解,为货运相关的基础设施网络的优化设计提供重要依据。
附图说明
[0059]
图1是本发明的卡车货运活动模式估计方法的流程图;
[0060]
图2是3类不同卡车行程链的详细信息图;
[0061]
图3是结合一个例子说明定义的符号的含义图。
具体实施方式
[0062]
以下将结合附图,对本发明的技术方案进行详细说明。
[0063]
如图1所示,本发明实施例公开的一种基于gps和抽样调查的卡车货运活动模式估计方法,包括如下步骤:
[0064]
(1)获取所研究的卡车对象的gps历史数据,具体而言,选取了9041辆卡车安装gps跟踪系统,追踪卡车轨迹的经纬度、速度、行驶距离和时间戳等信息,使用2017年8月的数据,以便根据所提出的方法估计其活动模式;
[0065]
(2)对所研究的卡车司机进行抽样调查,确定其所运送商品的类别和其在停车点的活动类型,具体而言,从上述安装gps跟踪系统的所有卡车中随机选取了50辆卡车,调查其2017年8月间在5个省的主要停车点和运输商品,卡车运输的商品包括了7种,即饮料、糖、大米、动物饲料、纸张、货运集装箱和混合混凝土;
[0066]
(3)根据卡车gps数据,提取每一辆卡车的有效停车点和停车时间以及从最近的主要道路到该停车点的距离,所有的停车点位置和停车时间的组成的序贯集合成为行程链。
[0067]
在此例中,首先,删除不完整的、缺少关键数据的gps记录;其次,对于单辆货车的gps记录集,如果连续的gps记录之间存在较大的时间间隔,则将其全部删除。将清洗整理后的每辆卡车的gps数据根据其时间戳进行排序,以确定任意两个连续的gps数据点之间的时间差值和距离差值,这些差值将用于确定有效的卡车停车点。
[0068]
使用最小停留时间和最小行驶距离来确定有效的停车点,如果卡车i在停车点s的开始时间和结束时间的差值大于最短停留时间y
min
,则认为该停车点s是一个有效停车点,如果小于最短停留时间y
min
,则认为该停车点s不是有效停车点,在有效停车点的基础上,采集卡车i行驶到点s+1走过的距离,如果这段距离大于最小行驶距离d
min
,那么判定s+1是一个新的潜在停车点,否则判定s+1是和s相同的有效停车点,对于新的潜在停车点,再利用最短停留时间进行判断,以此类推。
[0069]
在本例中,最小停留时间y
min
设置为20min。由于卡车在大型设施中可以进行多次停靠,最小行驶距离d
min
在工业用地或港口和其他剩余设施分别为2km和20-100m,从而根据上述步骤确定有效的卡车停车点。
[0070]
经过上述判断后,得到有效停车点s的集合,取每个有效停车点s对应时间段内经纬度的平均值作为s的位置,取停车点s的开始时间和结束时间的差值为停车时间。将卡车i的有效停车点按时间顺序进行整理,形成的序贯集合为卡车i的行程链,不同类型行程链的集合为活动模式的集合,如图2所示,共有三类不同的活动模式。
[0071]
为了说明具体符号的意义,进一步结合图3进行说明,例如卡车1的相关活动的符号表示为:
[0072]
活动集合
[0073]
a1=货运相关活动,货运相关活动,用餐,货运相关活动,加油,收车结束},
[0074]
货运相关活动顺序集合
[0075]
行程链
[0076]
根据步骤s31获得的整理后的gps数据,即卡车i在停车点s处的停留时间y
*
和从最近的道路到停车点的距离x
*
以及活动指标变量z
*
,通过上述对数似然函数可以估计得到模
型的参数结果如下:
[0077]
表1 7种不同类型的商品对应分布的参数
[0078][0079]
随后,计算卡车在有效停车点从事某一特定活动的概率,货车i在有效停车s处执行活动f的概率为
[0080][0081]
其中λ
*
为估计得到的参数,y
i,s
,x
i,s
分别为gps数据中获取的卡车i执行活动f的车辆停留时间和从最近的主要道路到潜在停车点的距离;由于卡车i在有效停车点s并执行活动f的指标变量的取值为0或1,因此上述概率公式可进一步表示为
[0082][0083]
由于卡车i在有效停车点s执行活动f相互独立,因此根据概率密度函数进一步表示为
[0084][0085]
其中和均为概率密度函数,并且其参数和为表1中得到的相应的估计值,其中为车辆i在停车点s执行活动f的停留时间和从最近的主要道路到潜在停车点的距离所服从分布经估计得到的均值和标准差,为车辆i在停车点s执行活动j经估计得到的均值和标准差,活动j包含在步骤s41中定义的集合fs内。
[0086]
令对上述概率取argmax函数,即
[0087][0088]
我们可以得到概率值最大对应的活动,即为卡车i停在有效停车点s的活动。
[0089]
根据抽样调查的卡车的行程信息,进一步修正卡车在停车点从事货运相关活动的概率。卡车i在区域l停车时,其在停车点s从事活动f的概率为:
[0090][0091]
其中为卡车i在有效停车点s执行活动f的概率,pr(i,s,f
′
)为卡车i在有效停车点s执行活动f
′
的概率,pr(l|f
′
)为卡车i假设执行活动f
′
时在区域l停留的概率,pr(l|f)为卡车i假设执行活动f时在区域l停留的概率,即
[0092][0093]
其中,o
f,l
为调查得到的在区域l处停车进行活动f的卡车数量。
[0094]
此处,一共对50辆卡车在5个省的行程信息进行调查,即l为抽样调查得到的50辆卡车在5个省的所有停车点的集合,o
f,l
调查得到的在停车点l处的卡车数量。
[0095]
通过修正后的概率,可以确认出卡车停车点密度高的地区,在此例中,休息活动最多的前5个省份的平均停留时间分别为69.8min、68.5min、67.0min、62.3min、60.2min、54.4min,装/卸货活动最多的前5个省份的平均停留时间分别为183.7min、175.0min、159.7min、158.0min、146.6min、143.5min,前5名省份的休息和装卸活动分别占据2017年8月3日总量的27.83%和47.04%。我们可以看出,这些活动的特征在不同省份之间存在较大差异。这种差异可能来自于这些省份的卡车携带商品和司机行为的不同。
[0096]
为了评估商品行程链或行程段状态,将2017年8月的每辆货车的gps原始数据按时间戳每连续3天进行排序,预测7种不同类型商品的商品行程链、与货运相关的活动模式和两点间的行程状态:
[0097]
1)基于对50辆卡车在5个省的行程信息的调查,获取所调查的卡车的行程链集合e,确定所有与货运相关的活动f,如装货、卸货等;
[0098]
2)如果卡车i的行程链ξi在已知行程链集合e内,则可以确定该车所载的商品类型c,否则,将行程链集合ξi对应的停车点位置匹配相应的gis地理位置,进而确定其所运送的商品类型c;
[0099]
3)根据确定的商品类型c以及卡车行程链集合ξi,对之前的已知行程链集合e进行更新;
[0100]
4)获取卡车i的行程链后(如碾米厂—港口—碾米厂),即可以确定与货运相关的活动模式,如果假设货物全部在卸下,那么便可以确定两点间的行程段状态(载货/空载)。
[0101]
根据商品种类的不同,不同商品行程链的数量不等。此处,以运送的商品大米为例,其3类不同卡车行程链的详细信息如说明书图3所示。从其中可以看出,模式1中的大米商品行程链都是在碾米厂装货,在另一个地点(如港口)卸货,最后返回碾米厂停车的模式;模式2中,除单次卸货地点外,在碾米厂单次装货后,还有3种2个卸货地点的模式;模式3比较特殊,其大米的装货在碾米厂和仓库同时进行,而卸货在工厂和配送中心同时进行。
[0102]
综上,本发明的方法综合考虑了使用gps和抽样调查数据来完成如何确定停车点、估计卡车活动等内容为优化设计与货运相关的基础设施和供应链网络提供了重要依据,有助于应对货运在特征和行为方面发生的变化,促进货运基础设施规划和设计的成功。
[0103]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实
施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。本技术实施例中的方案可以采用各种计算机语言实现,例如,面向对象的程序设计语言java和直译式脚本语言javascript等。
[0104]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0105]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0106]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0107]
尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
[0108]
显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1