一种装卸车鹤管状态识别方法和系统与流程
1.本发明属于石油化工行业技术领域,特别涉及一种装卸车鹤管状态识别方法和系统。
背景技术:
2.鹤管,是一种可以伸缩移动的管子,多用于石油、化工行业中液体装卸,管内介质如油、水、气体等。目前,鹤管是石油、化工行业流体装卸过程中的专用设备,又称流体装卸臂,它采用旋转接头与刚性管道及弯头连接起来,以实现火车、汽车槽车与栈桥储运管线之间传输液体介质的活动设备。
3.目前对危险化学品安全生产提出了更高的要求,以及采用信息化技术强化对事故易发多发部位和环节的检测预警,坚决遏制各类事故发生。近年来,随着深度学习技术的发展,基于深度学习方法的计算机视觉技术开始赋能于各个行业,但在石油化工行业技术领域尤其视频监控方面的应用较少。在大环境视频监控技术推广的前提下,如何提供一种可靠、有效的化工技术领域中装卸车行为规范的智能视频监控预防方法,是目前本领域技术人员亟待解决的问题。
技术实现要素:
4.为了解决上述技术问题,本发明提出了一种装卸车鹤管状态识别方法和系统,采用检测模型对鹤管类别和部位进行预测,可以最大程度地将深度学习技术赋能至化工领域,以信息化推进应急管理能力现代化。
5.为实现上述目的,本发明采用以下技术方案:
6.一种装卸车鹤管状态识别方法,包括以下步骤:
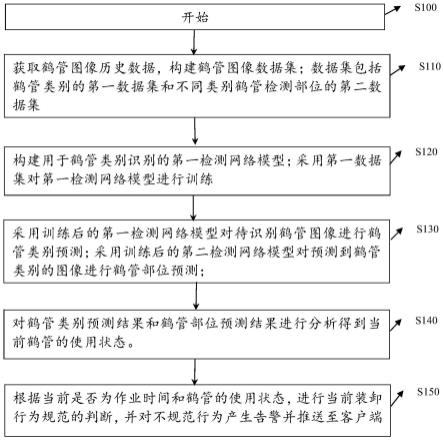
7.获取鹤管图像历史数据,构建鹤管图像数据集;所述数据集包括鹤管类别的第一数据集和不同类别鹤管检测部位的第二数据集;
8.构建用于鹤管类别识别的第一检测网络模型;采用第一数据集对所述第一检测网络模型进行训练;构建用于鹤管部位识别的第二检测网络模型,采用第二数据集对所述第二检测网络模型进行训练;
9.采用训练后的第一检测网络模型对待识别鹤管图像进行鹤管类别预测;采用训练后的第二检测网络模型对预测到鹤管类别的图像进行鹤管部位预测;对鹤管类别预测结果和鹤管部位预测结果进行分析得到当前鹤管的使用状态。
10.进一步的,所述获取鹤管图像历史数据,构建鹤管图像数据集的过程包括:
11.获取装卸车区域内的监控设备采集的不同时间段的视频流;
12.采用视频抽帧的方法对收集到的视频流处理得到鹤管图像;
13.对所述鹤管图像中鹤管的类别进行一次标注得到第一数据集;在对鹤管类别一次标注完成后再对鹤管部位进行二次标注形成第二数据集;
14.将所述第一数据集按照预设比例划分为第一训练集、第一验证集和第一测试集;
将所述第二数据集按照预设比例划分为第二训练集、第二验证集和第二测试集。
15.进一步的,对所述鹤管图像中鹤管类别进行一次标注包括:根据鹤管图像中鹤管的安装位置和粗细标注为顶部鹤管、粗底部鹤管和细底部鹤管;
16.在对鹤管的类别一次标注完成后再对鹤管的部位进行二次标注包括:分别对顶部鹤管、粗底部鹤管和细底部鹤管的检测部位标注为鹤管管头、鹤管管尾和鹤管拐角。
17.进一步的,所述采用第一数据集对所述第一检测网络模型进行训练的过程包括:采用第一训练集对所述第一检测网络模型进行训练;
18.所述采用第二数据集对所述第二检测网络模型进行训练的过程包括:采用第二训练集对所述第二检测网络模型进行训练。
19.进一步的,所述第一检测网络模型采用在yolov5算法中添加注意力机制;所述注意力机制的原理为:第一数据集依次经过yolov5算法中backbone层和head层提取特征后得到预设大小的特征图;通过计算待识别鹤管图像中目标像素点与特征图中其它所有点之间的相互关系,利用所述相互关系对目标像素点的特征进行加权,以获取有效的目标像素点特征。
20.进一步的,所述第二检测网络模型采用hrnet关键点检测算法;所述hrnet关键点检测算法检测的过程为:提取不同检测部位相对应的部位特征图;部位特征图中最大特征值所在的对应位置作为鹤管管头、鹤管管尾和鹤管拐角的关键点。
21.进一步的,所述采用训练后的第一检测网络模型对待识别鹤管图像进行鹤管类别预测的过程包括:将待识别的鹤管图像输入到训练后的第一检测网络模型中,通过训练后的第一检测网络模型对待识别的鹤管图像进行特征提取和类别预测,得到待识别鹤管图像的鹤管类别。
22.进一步的,所述采用训练后的第二检测网络模型对预测到鹤管类别的图像进行鹤管部位预测的过程包括:将第一检测网络模型识别到的鹤管在原始待识别鹤管图像中的区域输入至第二检测网络模型中进行部位预测,得到鹤管不同部位的关键点坐标和类别信息。
23.进一步的,所述对鹤管类别预测结果和鹤管部位预测结果进行分析得到当前鹤管的使用状态的过程包括:
24.获取鹤管不同部位的关键点坐标和类别信息;
25.如果检测模型预测出来的鹤管类别为顶部鹤管,则关键点坐标的数量为2个,则连接两个关键点坐标得到一条线段,若这条线段与图像横轴夹角小于10
°
,则为顶部鹤管使用中,否则为顶部鹤管未使用;
26.如果检测模型预测出来的鹤管类别为粗底部鹤管,则关键点坐标的数量为3个,则连接3个关键点得到2条线段,如果线段长度不同,两条线段的夹角小于100
°
,检测出的粗底部鹤管位于装卸车尾部,则此时为粗底部鹤管使用中,否则为粗底部鹤管未使用;
27.如果检测模型预测出来的鹤管类别为细底部鹤管,则关键点坐标的数量为三个,连接3个关键点得到2条线段,如果线段长度不同,两条线段的夹角大于100
°
且检测出的细底部鹤管位于装卸车中部,则此时为细底部鹤管使用中,否则为细底部鹤管未使用。
28.本发明还提出了一种装卸车鹤管状态识别系统,所述系统包括构建数据集模块、训练模块和识别模块;
29.所述构建数据集模块用于获取鹤管图像历史数据,构建鹤管图像数据集;所述数据集包括鹤管类别的第一数据集和不同类别鹤管检测部位的第二数据集;
30.所述训练模块用于构建用于鹤管类别识别的第一检测网络模型;采用第一数据集对所述第一检测网络模型进行训练;构建用于鹤管部位识别的第二检测网络模型,采用第二数据集对所述第二检测网络模型进行训练;
31.所述识别模块用于采用训练后的第一检测网络模型对待识别鹤管图像进行鹤管类别预测;采用训练后的第二检测网络模型对预测到鹤管类别的图像进行鹤管部位预测;对鹤管类别预测结果和鹤管部位预测结果进行分析得到当前鹤管的使用状态。
32.发明内容中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:
33.本发明提出了一种装卸车鹤管状态识别方法和系统,该方法包括获取鹤管图像历史数据,构建鹤管图像数据集;数据集包括鹤管类别的第一数据集和不同类别鹤管检测部位的第二数据集;构建用于鹤管类别识别的第一检测网络模型;采用第一数据集对所述第一检测网络模型进行训练;构建用于鹤管部位识别的第二检测网络模型,采用第二数据集对所述第二检测网络模型进行训练;采用训练后的第一检测网络模型对待识别鹤管图像进行鹤管类别预测;采用训练后的第二检测网络模型对预测到鹤管类别的图像进行鹤管部位预测;对鹤管类别预测结果和鹤管部位预测结果进行分析得到当前鹤管的使用状态。基于一种装卸车鹤管状态识别方法,本发明还提出了一种装卸车鹤管状态识别系统。本发明采用检测模型对鹤管类别和部位进行预测,可以最大程度地将深度学习技术赋能至化工领域,以信息化推进应急管理能力现代化。
34.本发明在进行鹤管类别识别时,提出了改进的yolov5的第一检测网络模型,在现有的yolov5目标检测算法加入ccf注意力融合模块,对不同鹤管图像进行检测识别,以此提高模型更加有效提取目标特征。
35.本发明将第一检测网络模型和第二检测网络模型相结合,以部位检测为主,类别检测为辅,可以识别不同鹤管、不同鹤管部位的位置及类别信息,结合两个算法模型的识别结果进行鹤管使用状态的判断,大大提高了鹤管状态判断的准确率和可靠性。
36.本发明对识别后的结果进行分析,首先确定检测出来的鹤管类别和位置区域,然后筛选出高质量的关键点检测结果,最后结合鹤管不同部位的位置信息,依据角度和鹤管位置判断当前鹤管的使用状态。
附图说明
37.如图1为本发明实施例1一种装卸车鹤管状态识别方法流程图;
38.如图2为本发明实施例1改进的yolov5目标检测算法示意图;
39.如图3为本发明实施例2一种装卸车鹤管状态识别系统示意图。
具体实施方式
40.为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本发明进行详细阐述。下文的公开提供了许多不同的实施例或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。此外,本发明可以
在不同例子中重复参考数字和/或字母。这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施例和/或设置之间的关系。应当注意,在附图中所图示的部件不一定按比例绘制。本发明省略了对公知组件和处理技术及工艺的描述以避免不必要地限制本发明。
41.实施例1
42.本发明实施例1提出了一种装卸车鹤管状态识别方法,用于解决现有技术中鹤管状态识别的缺陷,让计算机视觉技术开始赋能于化工行业。
43.某化工厂区监控实时拍摄现场视频。在拍摄的视频流中按一定的时间间隔抽取若干张图片送入本发明所采用目标检测模型(目标检测模型即鹤管类别检测网络模型)和关键点检测模型(关键点检测模型即鹤管部位关键点检测网络模型)后,目标检测模型在某一时刻检测出鹤管目标信息,包括位置和类别信息。关键点检测模型在某一时刻检测出鹤管上的关键点信息。关键点信息包括鹤管管头、鹤管管尾、鹤管拐角等位置及类别信息。对检测出的目标信息和关键点信息进行分析,判读当前时刻的鹤管使用状态信息,并根据当前是否在装卸车作业时间进行装卸行为的规范判断。
44.如图1为本发明实施例1一种装卸车鹤管状态识别方法流程图;
45.在步骤s100中,开始处理该流程;
46.在步骤s110中,获取鹤管图像历史数据,构建鹤管图像数据集;数据集包括鹤管类别的第一数据集和不同类别鹤管检测部位的第二数据集;
47.具体的过程包括:获取布置在化工厂区中装卸车区域的若干个摄像头视频数据并收集不同时间段内的视频流;采用视频抽帧的方法对收集到的视频流进行处理,得到若干张图片。
48.汇总所有的图片之后,根据鹤管图像中鹤管的安装位置和粗细一次标注为顶部鹤管、粗底部鹤管和细底部鹤管;
49.在对鹤管的类别一次标注完成后再对鹤管的部位进行二次标注包括:分别对顶部鹤管、粗底部鹤管和细底部鹤管的检测部位标注为鹤管管头、鹤管管尾和鹤管拐角;对鹤管图像中鹤管的类别进行一次标注得到第一数据集;在对鹤管类别一次标注完成后再对鹤管部位进行二次标注形成第二数据集;
50.将第一数据集按照预设比例划分为第一训练集、第一验证集和第一测试集;将第二数据集按照预设比例划分为第二训练集、第二验证集和第二测试集。
51.在步骤s120中,构建用于鹤管类别识别的第一检测网络模型;采用第一数据集对第一检测网络模型进行训练;
52.第一检测网络模型采用在yolov5算法中添加注意力机制;所述注意力机制的原理为:第一数据集依次经过yolov5算法中backbone层和head层提取特征后得到预设大小的特征图;通过计算待识别鹤管图像中目标像素点与特征图中其它所有点之间的相互关系,利用相互关系对目标像素点的特征进行加权,以获取有效的目标像素点特征。
53.如图2为本发明实施例1改进的yolov5目标检测算法示意图;针对yolov5目标检测算法进行改进,添加crisscross attention(ccf)注意力模块,借鉴自注意力机制的原理,使用q(query)查询向量、k(key)键值向量来确定权重,再与v(value)值向量取权重进行融合。注意力模块通过计算目标特征像素点与特征图中其它所有点之间的相互关系,并用这样的相互关系对目标像素点的特征进行加权,以此获得更加有效的目标像素点特征。
54.ccf注意力模块执行的过程包括:第一数据集依次经过yolov5算法中backbone层和head层提取特征后得到尺寸为(c*h*w)大小的特征图h;
55.h经过三个1*1卷积层后,分别生成特征q、k、v,其中q(query查询向量)、k(key键值向量)的尺寸均为(c'*h*w),v(value值向量)的尺寸保持不变,仍为(c*h*w);具体实现包括:取q中特征图中某一像素点的所有通道值:q=q(i,j),size=(1,c');取k特征图中与q同一行和同一列的所有像素点的所有通道值,交叉位置取了两次,只选一次,k的size=(c',h+w-1);q*k得到q_atten,size=(1,h+w-1),并对这h+w-1个值进行softmax操作,即权重和为1;对q中的所有像素点重复上面的过程,即得到了每个像素点的归一权重,此时atten,size=(batch,h,w,h+w-1)。
56.针对上面获取的q、k特征atten,size=(batch,h,w,h+w-1)分别经过affinity操作和softmax后再与v特征进行aggregation操作,最后与输入特征图h进行残差连接。具体的过程包括:取atten中某个像素点的所有权重,a=atten(i,j),size=(1,h+w-1);取v的某一通道cn的特征图vn,size=(h,w),选取vn上与a对应位置的同一行和同一列的数值,记作vn,size=(1,h+w-1);vn与a.t相乘,即得到加权后的vn值,size=(1,1);对v中的所有通道重复上述的操作;对atten中的所有像素点重复通道重复的操作;残差网络:h'=ccatten(h)+h。
57.构建用于鹤管部位识别的第二检测网络模型,采用第二数据集对所述第二检测网络模型进行训练;hrnet关键点检测算法检测的过程为:提取不同检测部位相对应的部位特征图;部位特征图中最大特征值所在的对应位置作为鹤管管头、鹤管管尾和鹤管拐角的关键点。
58.在步骤s130中,采用训练后的第一检测网络模型对待识别鹤管图像进行鹤管类别预测;采用训练后的第二检测网络模型对预测到鹤管类别的图像进行鹤管部位预测;
59.采用训练后的第一检测网络模型对待识别鹤管图像进行鹤管类别预测的过程包括:将待识别的鹤管图像输入到训练后的第一检测网络模型中,通过训练后的第一检测网络模型对待识别的鹤管图像进行特征提取和类别预测,得到待识别鹤管图像的鹤管类别。
60.采用训练后的第二检测网络模型对预测到鹤管类别的图像进行鹤管部位预测的过程包括:将第一检测网络模型识别到的鹤管在原始待识别鹤管图像中的区域输入至第二检测网络模型中进行部位预测,得到鹤管不同部位的关键点坐标和类别信息。
61.在步骤s140中,对鹤管类别预测结果和鹤管部位预测结果进行分析得到当前鹤管的使用状态。
62.获取鹤管不同部位的关键点坐标和类别信息;
63.如果检测模型预测出来的鹤管类别为顶部鹤管,则关键点坐标的数量为2个,则连接两个关键点坐标得到一条线段,若这条线段与图像横轴夹角小于10
°
,则为顶部鹤管使用中,否则为顶部鹤管未使用;
64.如果检测模型预测出来的鹤管类别为粗底部鹤管,则关键点坐标的数量为3个,则连接3个关键点得到2条线段,如果线段长度不同,两条线段的夹角小于100
°
,检测出的粗底部鹤管位于装卸车尾部,则此时为粗底部鹤管使用中,否则为粗底部鹤管未使用;
65.如果检测模型预测出来的鹤管类别为细底部鹤管,则关键点坐标的数量为三个,连接3个关键点得到2条线段,如果线段长度不同,两条线段的夹角大于100
°
且检测出的细
底部鹤管位于装卸车中部,则此时为细底部鹤管使用中,否则为细底部鹤管未使用。
66.在步骤s150中,根据当前是否为作业时间和鹤管的使用状态,进行当前装卸行为规范的判断,并对不规范行为产生告警并推送至客户端。
67.如果当前时刻为装卸作业时间段内,且不同鹤管的状态为使用中,则装卸行为规范,否则为装卸行为不规范产生告警推送至用户端;如果当前时刻不在装卸作业时间段内,且不同鹤管的状态为未使用,则装卸行为规范,否则为装卸行为不规范产生告警推送至用户端。
68.本发明实施例1提出的一种装卸车鹤管状态识别方法,采用检测模型对鹤管类别和部位进行预测,可以最大程度地将深度学习技术赋能至化工领域,以信息化推进应急管理能力现代化。
69.本发明实施例1提出的一种装卸车鹤管状态识别方法,在进行鹤管类别识别时,提出了改进的yolov5的第一检测网络模型,在现有的yolov5目标检测算法加入ccf注意力融合模块,对不同鹤管图像进行检测识别,以此提高模型更加有效提取目标特征。
70.本发明实施例1提出的一种装卸车鹤管状态识别方法,将第一检测网络模型和第二检测网络模型相结合,以部位检测为主,类别检测为辅,可以识别不同鹤管、不同鹤管部位的位置及类别信息,结合两个算法模型的识别结果进行鹤管使用状态的判断,大大提高了鹤管状态判断的准确率和可靠性。
71.本发明实施例1提出的一种装卸车鹤管状态识别方法,对识别后的结果进行分析,首先确定检测出来的鹤管类别和位置区域,然后筛选出高质量的关键点检测结果,最后结合鹤管不同部位的位置信息,依据角度和鹤管位置判断当前鹤管的使用状态。
72.实施例2
73.基于本发明实施例1提出的一种装卸车鹤管状态识别方法,本发明实施例2还提出了一种装卸车鹤管状态识别系统,该系统包括构建数据集模块、训练模块和识别模块;
74.构建数据集模块用于获取鹤管图像历史数据,构建鹤管图像数据集;所述数据集包括鹤管类别的第一数据集和不同类别鹤管检测部位的第二数据集;
75.训练模块用于构建用于鹤管类别识别的第一检测网络模型;采用第一数据集对所述第一检测网络模型进行训练;构建用于鹤管部位识别的第二检测网络模型,采用第二数据集对所述第二检测网络模型进行训练;
76.识别模块用于采用训练后的第一检测网络模型对待识别鹤管图像进行鹤管类别预测;采用训练后的第二检测网络模型对预测到鹤管类别的图像进行鹤管部位预测;对鹤管类别预测结果和鹤管部位预测结果进行分析得到当前鹤管的使用状态。
77.构建模块实现的过程包括:获取布置在化工厂区中装卸车区域的若干个摄像头视频数据并收集不同时间段内的视频流;采用视频抽帧的方法对收集到的视频流进行处理,得到若干张图片。
78.汇总所有的图片之后,根据鹤管图像中鹤管的安装位置和粗细一次标注为顶部鹤管、粗底部鹤管和细底部鹤管;
79.在对鹤管的类别一次标注完成后再对鹤管的部位进行二次标注包括:分别对顶部鹤管、粗底部鹤管和细底部鹤管的检测部位标注为鹤管管头、鹤管管尾和鹤管拐角;对鹤管图像中鹤管的类别进行一次标注得到第一数据集;在对鹤管类别一次标注完成后再对鹤管
部位进行二次标注形成第二数据集;
80.将第一数据集按照预设比例划分为第一训练集、第一验证集和第一测试集;将第二数据集按照预设比例划分为第二训练集、第二验证集和第二测试集。
81.训练模块实现的过程包括:第一检测网络模型采用在yolov5算法中添加注意力机制;所述注意力机制的原理为:第一数据集依次经过yolov5算法中backbone层和head层提取特征后得到预设大小的特征图;通过计算待识别鹤管图像中目标像素点与特征图中其它所有点之间的相互关系,利用相互关系对目标像素点的特征进行加权,以获取有效的目标像素点特征。
82.如图2为本发明实施例1改进的yolov5目标检测算法示意图;针对yolov5目标检测算法进行改进,添加crisscross attention(ccf)注意力模块,借鉴自注意力机制的原理,使用q(query)查询向量、k(key)键值向量来确定权重,再与v(value)值向量取权重进行融合。注意力模块通过计算目标特征像素点与特征图中其它所有点之间的相互关系,并用这样的相互关系对目标像素点的特征进行加权,以此获得更加有效的目标像素点特征。
83.ccf注意力模块执行的过程包括:第一数据集依次经过yolov5算法中backbone层和head层提取特征后得到尺寸为(c*h*w)大小的特征图h;
84.h经过三个1*1卷积层后,分别生成特征q、k、v,其中q(query查询向量)、k(key键值向量)的尺寸均为(c'*h*w),v(value值向量)的尺寸保持不变,仍为(c*h*w);具体实现包括:取q中特征图中某一像素点的所有通道值:q=q(i,j),size=(1,c');取k特征图中与q同一行和同一列的所有像素点的所有通道值,交叉位置取了两次,只选一次,k的size=(c',h+w-1);q*k得到q_atten,size=(1,h+w-1),并对这h+w-1个值进行softmax操作,即权重和为1;对q中的所有像素点重复上面的过程,即得到了每个像素点的归一权重,此时atten,size=(batch,h,w,h+w-1)。
85.针对上面获取的q、k特征atten,size=(batch,h,w,h+w-1)分别经过affinity操作和softmax后再与v特征进行aggregation操作,最后与输入特征图h进行残差连接。具体的过程包括:取atten中某个像素点的所有权重,a=atten(i,j),size=(1,h+w-1);取v的某一通道cn的特征图vn,size=(h,w),选取vn上与a对应位置的同一行和同一列的数值,记作vn,size=(1,h+w-1);vn与a.t相乘,即得到加权后的vn值,size=(1,1);对v中的所有通道重复上述的操作;对atten中的所有像素点重复通道重复的操作;残差网络:h'=ccatten(h)+h。
86.构建用于鹤管部位识别的第二检测网络模型,采用第二数据集对所述第二检测网络模型进行训练;hrnet关键点检测算法检测的过程为:提取不同检测部位相对应的部位特征图;部位特征图中最大特征值所在的对应位置作为鹤管管头、鹤管管尾和鹤管拐角的关键点。
87.识别模块实现的过程包括:采用训练后的第一检测网络模型对待识别鹤管图像进行鹤管类别预测的过程包括:将待识别的鹤管图像输入到训练后的第一检测网络模型中,通过训练后的第一检测网络模型对待识别的鹤管图像进行特征提取和类别预测,得到待识别鹤管图像的鹤管类别。
88.采用训练后的第二检测网络模型对预测到鹤管类别的图像进行鹤管部位预测的过程包括:将第一检测网络模型识别到的鹤管在原始待识别鹤管图像中的区域输入至第二
检测网络模型中进行部位预测,得到鹤管不同部位的关键点坐标和类别信息。
89.该系统还包括分析上报模块;分析上报模块实现的过程包括:对鹤管类别预测结果和鹤管部位预测结果进行分析得到当前鹤管的使用状态。
90.获取鹤管不同部位的关键点坐标和类别信息;
91.如果检测模型预测出来的鹤管类别为顶部鹤管,则关键点坐标的数量为2个,则连接两个关键点坐标得到一条线段,若这条线段与图像横轴夹角小于10
°
,则为顶部鹤管使用中,否则为顶部鹤管未使用;
92.如果检测模型预测出来的鹤管类别为粗底部鹤管,则关键点坐标的数量为3个,则连接3个关键点得到2条线段,如果线段长度不同,两条线段的夹角小于100
°
,检测出的粗底部鹤管位于装卸车尾部,则此时为粗底部鹤管使用中,否则为粗底部鹤管未使用;
93.如果检测模型预测出来的鹤管类别为细底部鹤管,则关键点坐标的数量为三个,连接3个关键点得到2条线段,如果线段长度不同,两条线段的夹角大于100
°
且检测出的细底部鹤管位于装卸车中部,则此时为细底部鹤管使用中,否则为细底部鹤管未使用。
94.根据当前是否为作业时间和鹤管的使用状态,进行当前装卸行为规范的判断,并对不规范行为产生告警并推送至客户端。如果当前时刻为装卸作业时间段内,且不同鹤管的状态为使用中,则装卸行为规范,否则为装卸行为不规范产生告警推送至用户端;如果当前时刻不在装卸作业时间段内,且不同鹤管的状态为未使用,则装卸行为规范,否则为装卸行为不规范产生告警推送至用户端。
95.本发明实施例2提出的一种装卸车鹤管状态识别系统,采用检测模型对鹤管类别和部位进行预测,可以最大程度地将深度学习技术赋能至化工领域,以信息化推进应急管理能力现代化。
96.本发明实施例2提出的一种装卸车鹤管状态识别系统,在进行鹤管类别识别时,提出了改进的yolov5的第一检测网络模型,在现有的yolov5目标检测算法加入ccf注意力融合模块,对不同鹤管图像进行检测识别,以此提高模型更加有效提取目标特征。
97.本发明实施例2提出的一种装卸车鹤管状态识别系统,将第一检测网络模型和第二检测网络模型相结合,以部位检测为主,类别检测为辅,可以识别不同鹤管、不同鹤管部位的位置及类别信息,结合两个算法模型的识别结果进行鹤管使用状态的判断,大大提高了鹤管状态判断的准确率和可靠性。
98.本发明实施例2提出的一种装卸车鹤管状态识别系统,对识别后的结果进行分析,首先确定检测出来的鹤管类别和位置区域,然后筛选出高质量的关键点检测结果,最后结合鹤管不同部位的位置信息,依据角度和鹤管位置判断当前鹤管的使用状态。
99.本技术实施例2提供的一种装卸车鹤管状态识别系统中相关部分的说明可以参见本技术实施例1提供的一种服务器能耗测试可视化的方法中对应部分的详细说明,在此不再赘述。
100.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的
过程、方法、物品或者设备中还存在另外的相同要素。另外,本技术实施例提供的上述技术方案中与现有技术中对应技术方案实现原理一致的部分并未详细说明,以免过多赘述。
101.上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制。对于所属领域的技术人员来说,在上述说明的基础上还可以做出其它不同形式的修改或变形。这里无需也无法对所有的实施方式予以穷举。在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1