遥感影像智能解译方法、装置、设备及存储介质与流程
本发明涉及计算机视觉,尤其涉及一种遥感影像智能解译方法、装置、设备及存储介质。
背景技术:
1、随着遥感技术的快速发展,对于遥感图像的应用越来越广泛,通过遥感影像为快速准确的获得地面信息创造了有利条件,在对遥感影像的应用之前,需要对采集到的遥感影像进行解译,从而得到便于利用的图像;但是,目前对于遥感影像的解译若要是保证更高准确性要求的情况下,更多还是依赖主观人眼进行影响融合,信息提取,从而因为主观评价和观察者人眼视觉感知和经验水平的差异导致遥感影像的解译存在差异性。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种遥感影像智能解译方法,旨在解决现有技术对无人机采集的遥感影像解译不够准确的技术问题。
2、为实现上述目的,本发明提供了一种遥感影像智能解译方法,所述方法包括以下步骤:
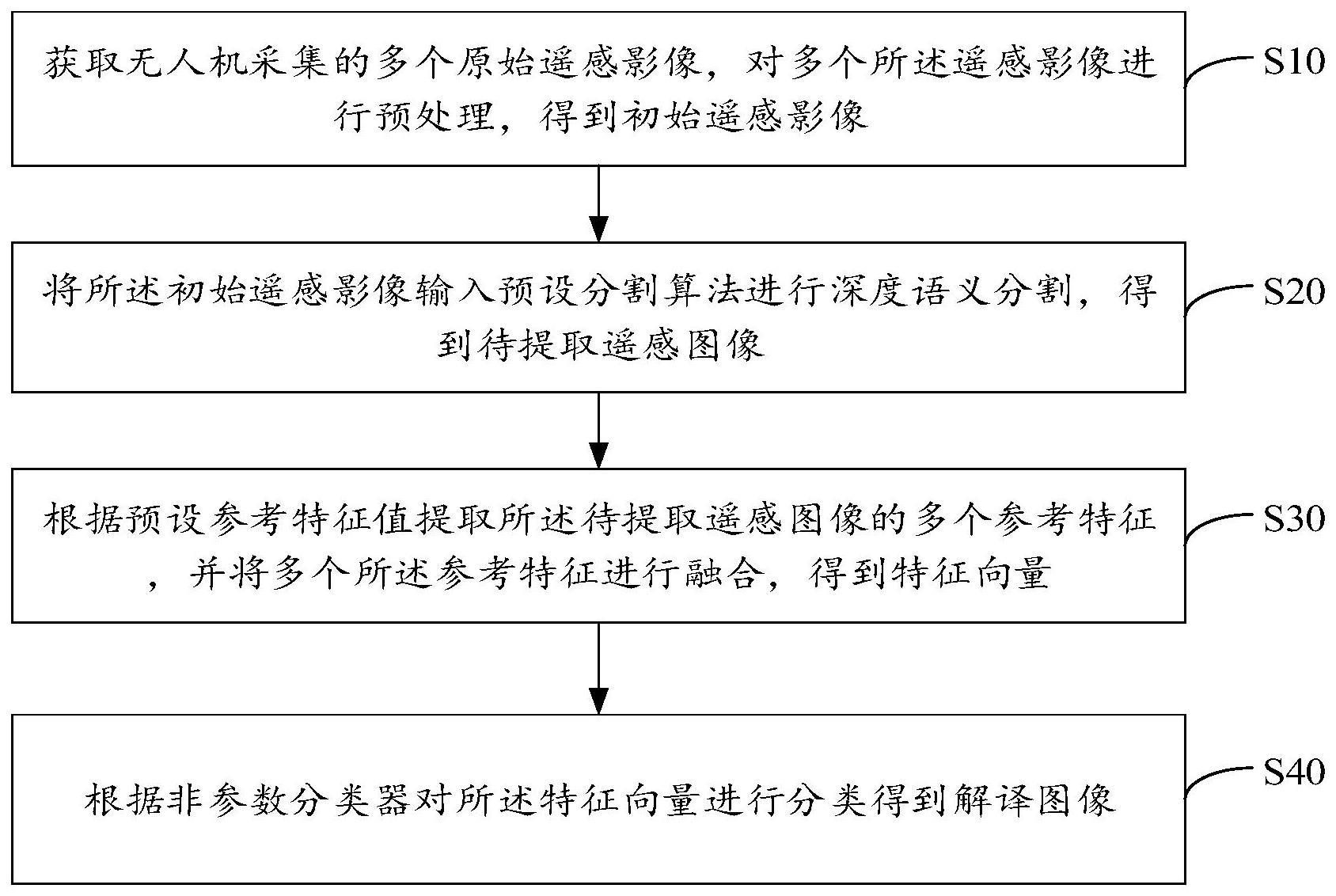
3、获取无人机采集的多个原始遥感影像,对所述多个原始遥感影像进行预处理,得到初始遥感影像;
4、将所述初始遥感影像输入预设分割算法进行深度语义分割,得到待提取遥感图像;
5、根据预设参考特征值提取所述待提取遥感图像的多个参考特征,并将多个所述参考特征进行融合,得到特征向量;
6、根据非参数分类器对所述特征向量进行分类得到解译图像。
7、可选地,所述获取无人机采集的多个原始遥感影像,对所述多个原始遥感影像进行预处理,得到初始遥感影像,包括:
8、获取无人机采集的多个原始遥感影像,根据绝对辐射定标对所述原始遥感影像的图像像元值进行变换,得到辐亮度图像;
9、根据高程模型数据对所述辐亮度图像进行投影差修正,得到修正后的辐亮度图像,对所述修正后的辐亮度图像进行重采样,得到正射影像;
10、通过主成分变换策略将多个所述正射影像进行融合,得到初始遥感影像。
11、可选地,所述通过主成分变换策略将多个所述正射影像进行融合,得到初始遥感影像,包括:
12、计算多个所述正射影像的多光谱影像的协方差矩阵,根据所述协方差计算所述多光谱影像的多个主分量;
13、以所述主分量中的第一主分量为标准与单色波的全色影像进行匹配得到处理后的全色影像;
14、根据所述处理后的全色影像替换所述主分量中的第一主分量,得到初始遥感影像。
15、可选地,所述预设分割算法包括深度语义分割算法以及超像素分割算法;
16、所述将所述初始遥感影像输入预设分割算法进行深度语义分割,得到待提取遥感图像,包括:
17、将所述初始遥感影像输入深度语义分割算法,得到所述初始遥感影像的预测标签值;
18、将所述初始遥感影像输入超像素分割算法,将局部高相似度的像素进行聚类得到多个子区域;
19、将各个子区域内所有像素点的预测标签值进行统计得到参考标签,并将所述参考标签作为对应子区域的类别;
20、根据各个子区域的类别对所述初始遥感影像进行分割得到待提取遥感图像。
21、可选地,所述将所述初始遥感影像输入深度语义分割算法,得到所述初始遥感影像的预测标签值,包括:
22、将所述初始遥感影像输入深度语义分割算法,得到所述初始遥感影像中像素点的概率分布图;
23、通过预设函数对所述概率分布图归一化处理得到参考概率分布图;
24、计算所述概率分布图中每个像素点类别概率的最大值,根据所述最大值计算所述初始遥感影像的预测标签值。
25、可选地,所述预设参考特征值包括光谱特征以及形状特征;
26、所述根据预设参考特征值提取所述待提取遥感图像的多个参考特征,并将多个所述参考特征进行融合,得到特征向量,包括:
27、根据所述待提取遥感图像中对象的像素值、波段以及象元数计算所述待提取遥感图像的光谱特征;
28、根据所述待提取遥感图像中对象的边界长度以及面积计算所述待提取遥感图像的形状特征;
29、将所述光谱特征与所述形状特征融合得到所述待提取遥感图像中对象的特征向量。
30、可选地,所述非参数分类器包括约束条件、目标函数;
31、所述根据非参数分类器对所述特征向量进行分类得到最终的解译图像,包括:
32、将所述特征向量输入非参数分类器,根据松弛变量对所述约束条件进行修正,得到修正后的约束条件;
33、根据所述修正后的约束条件对所述目标函数进行修正得到修正后的目标函数;
34、根据所述目标函数对所述特征向量进行分类得到最终的解译图像。
35、此外,为实现上述目的,本发明还提出一种遥感影像智能解译装置,所述遥感影像智能解译装置包括:
36、此外,为实现上述目的,本发明还提出一种遥感影像智能解译设备,所述遥感影像智能解译设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的遥感影像智能解译程序,所述遥感影像智能解译程序配置为实现如上文所述的遥感影像智能解译方法的步骤。
37、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有遥感影像智能解译程序,所述遥感影像智能解译程序被处理器执行时实现如上文所述的遥感影像智能解译方法的步骤。
38、本发明对无人机采集的遥感影像进行校正后,通过预设分割算法对遥感影像更加精准的分割,继而特征提取以及分类实现对遥感影像中不同地物的精准识别,从而达到对遥感影像的智能解译,避免了目前人为解译过程中产生的差异化问题,能够更加准确的读取遥感影像中的地物信息。
技术特征:
1.一种遥感影像智能解译方法,其特征在于,所述遥感影像智能解译方法包括:
2.如权利要求1所述的遥感影像智能解译方法,其特征在于,所述获取无人机采集的多个原始遥感影像,对所述多个原始遥感影像进行预处理,得到初始遥感影像,包括:
3.如权利要求2所述的遥感影像智能解译方法,其特征在于,所述通过主成分变换策略将多个所述正射影像进行融合,得到初始遥感影像,包括:
4.如权利要求1所述的遥感影像智能解译方法,其特征在于,所述预设分割算法包括深度语义分割算法以及超像素分割算法;
5.如权利要求4所述的遥感影像智能解译方法,其特征在于,所述将所述初始遥感影像输入深度语义分割算法,得到所述初始遥感影像的预测标签值,包括:
6.如权利要求4所述的遥感影像智能解译方法,其特征在于,所述预设参考特征值包括光谱特征以及形状特征;
7.如权利要求1-6中任一项所述的遥感影像智能解译方法,其特征在于,所述非参数分类器包括约束条件、目标函数;
8.一种遥感影像智能解译装置,其特征在于,所述遥感影像智能解译装置包括:
9.一种遥感影像智能解译设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的遥感影像智能解译程序,所述遥感影像智能解译程序配置为实现如权利要求1至7中任一项所述的遥感影像智能解译方法。
10.一种存储介质,其特征在于,所述存储介质上存储有遥感影像智能解译程序,所述遥感影像智能解译程序被处理器执行时实现如权利要求1至7任一项所述的遥感影像智能解译方法。
技术总结
本发明属于计算机视觉技术领域,公开了一种遥感影像智能解译方法、装置、设备及存储介质;该方法包括:对无人机采集的多个原始遥感影像预处理得到初始遥感影像;将初始遥感影像输入预设分割算法进行深度语义分割得到待提取遥感图像;根据预设参考特征值提取待提取遥感图像的多个参考特征,并将多个参考特征进行融合得到特征向量;根据非参数分类器对特征向量分类得到解译图像;本发明对无人机采集的遥感影像进行校正后,通过预设分割算法对遥感影像更加精准的分割,继而特征提取以及分类实现对遥感影像中不同地物的精准识别,从而达到对遥感影像的智能解译,避免了目前人为解译过程中产生的差异化问题,能够更加准确的读取遥感影像中的地物信息。
技术研发人员:何姝,黄俊,王志苗,陈耿佳
受保护的技术使用者:深圳市宇驰检测技术股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!