一种基于仿生超材料和数据驱动的定制化鞋底设计方法
1.本发明涉及鞋底设计领域,特别是涉及一种基于仿生超材料和数据驱动的定制化鞋底设计方法。
背景技术:
2.人的足部主要由踝关节,脚跟,足弓,脚趾等组成。足部兼顾人体的负重和运动功能。研究发现,不合脚的鞋子会增加足部的压力,从而引发不适感甚至足部疾病。此外,足底连结着人体的12条经络中,最为重要的其中6条:即脾经、胃经、膀胱经、肾经、肝经及胆经。故有:“足底是反映全身的镜子”之说。足底处在人体末端,因远离心脏而供血不足,故反复刺激按摩足底则可促进血液流畅,加强人体心脏泵的作用。同时,年龄增长、糖尿病以及高弓足等足部畸形会引起足底压力异常相关的足跟痛、跖痛症、足底溃疡等一系列足部疾病。
3.相关技术中,已经实现了通过具有负泊松比的力学超材料制作定制化鞋底,利用负泊松比材料在单轴压力(拉力)作用下发生横向收缩(膨胀)的特殊力学性质,实现鞋底局部变形与脚掌几何形貌进行匹配,为穿戴者提供良好的舒适性。然而,目前基于力学超材料的鞋底设计使用的是类似绗架的拓扑结构,一般通过几种超材料元胞的组合实现鞋底设计,无法与定制对象的脚型进行精准匹配且实现受力均匀化。
技术实现要素:
4.有鉴于此,本发明旨在提出一种基于仿生超材料和数据驱动的定制化鞋底设计方法,以解决相关技术中鞋底设计无法与定制对象的脚型精准匹配且实现受力均匀化的问题。
5.为达到上述目的,本发明的技术方案是这样实现的:
6.一种基于仿生超材料和数据驱动的定制化鞋底设计方法,包括:
7.对定制对象的足部进行建模,得到足部模型,所述足部模型中至少包括足部各个点位的压力参数;
8.对足底进行区域划分,得到多个足底区域,并基于所述足部各个点位的压力参数,确定每个所述足底区域的目标弹性张量;
9.基于所述每个足底区域的所述目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞;其中,所述仿生超材料元胞用于指示制作鞋底的仿生超材料的结构参数;
10.基于多个所述足底区域对应的仿生超材料元胞,制作得到所述定制化鞋底。
11.进一步地,所述基于所述每个足底区域的目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞,包括:
12.根据元胞数据库以及所述元胞数据库中仿生超材料元胞对应的弹性张量,构建数据驱动模型;其中,所述元胞数据库包括多个所述仿生超材料元胞的结构数据;
13.基于所述数据驱动模型和所述每个足底区域的目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞。
14.进一步地,所述基于多个所述足底区域对应的仿生超材料元胞,制作得到所述定制化鞋底,包括:
15.采用径向分布函数连接多个所述仿生超材料元胞,得到定制化鞋底模型;
16.根据所述定制化鞋底模型进行3d打印,得到所述定制化鞋底。
17.进一步地,在所述采用径向分布函数连接多个所述仿生超材料元胞,得到定制化鞋底模型之后,所述方法还包括:
18.步骤1,对所述定制对象的足部以及所述定制化鞋底进行有限元分析,以获取所述定制化鞋底的平均接触应力以及每个所述足底区域的接触应力;
19.步骤2,将所述鞋底每个所述足底区域的接触应力与所述平均接触应力相比较,以对与所述平均接触应力差值大于应力阈值的所述足底区域对应的仿生超材料元胞进行更新;
20.步骤3,采用更新后的所述仿生超材料元胞重新得到所述定制化鞋底;
21.步骤4,重复上述步骤1-3,直至所述定制化鞋底的每个足底区域的接触应力与平均接触应力的差值小于等于所述应力阈值。
22.进一步地,所述对足底进行区域划分,得到多个足底区域,并基于所述足部各个点位的压力参数确定每个所述足底区域的目标弹性张量,包括:
23.根据足底轮廓,采用网格对所述足底轮廓进行区域划分,以得到多个所述足底区域;
24.基于每个所述足底区域中所包括的点位的所述压力参数,确定每个所述足底区域的平均压力值;
25.基于每个所述足底区域的所述平均压力值,确定每个所述足底区域对应的所述目标弹性张量。
26.进一步地,所述根据元胞数据库以及所述元胞数据库中仿生超材料元胞对应的弹性张量,构建数据驱动模型,包括:
27.将所述仿生超材料元胞作为训练样本训练第一预设模型,得到生成模型;
28.并基于所述仿生超材料元胞以及对应的所述弹性张量训练第二预设模型,得到预测模型;
29.将所述生成模型和所述预测模型耦合,得到所述数据驱动模型。
30.进一步地,所述基于所述数据驱动模型和所述每个足底区域的目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞,包括:
31.采用随机向量输入所述数据驱动模型,以得到仿生超材料元胞以及所述仿生超材料元胞的弹性张量;
32.基于所述目标弹性张量与所述仿生超材料元胞的弹性张量的差值,对所述随机向量进行更新,以得到所述目标弹性张量对应的仿生超材料元胞。
33.进一步地,所述元胞数据库建立步骤包括:
34.采用ct扫描获取目标对象的松质骨结构数据;
35.将所述松质骨结构数据转换为三维矩阵;
36.将所述三维矩阵作为所述仿生超材料元胞的结构数据存储,以建立所述元胞数据库。
37.进一步地,所述对定制对象的足部进行建模,得到足部模型,所述足部模型中至少包括足部各个点位的压力参数,包括:
38.通过3d扫描仪获取所述定制对象的足部点云数据;
39.基于所述足部点云数据,对所述定制对象进行足部建模得到所述定制对象的足部几何模型,并将所述定制对象足部与鞋底建模得到有限元模型;
40.基于所述几何模型和所述有限元模型,获取所述足部各个点位的压力参数。
41.本发明的另一目的在于提出一种基于仿生超材料和数据驱动的定制化鞋底设计装置,以解决相关技术中鞋底设计无法与定制对象的脚型精准匹配且实现受力均匀化的问题。
42.为达到上述目的,本发明的技术方案是这样实现的:
43.一种基于仿生超材料和数据驱动的定制化鞋底设计装置,包括:
44.建模模块,用于对定制对象的足部进行建模,得到足部模型,所述足部模型中至少包括足部各个点位的压力参数;
45.确定模块,用于对足底进行区域划分,得到多个足底区域,并基于所述足部各个点位的压力参数确定每个所述足底区域的目标弹性张量;
46.设计模块,用于基于所述每个足底区域的所述目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞;其中,所述仿生超材料元胞用于指示制作鞋底的仿生超材料的结构参数;
47.制作模块,用于基于多个所述足底区域对应的仿生超材料元胞,制作得到所述定制化鞋底。
48.所述基于仿生超材料和数据驱动的定制化鞋底设计装置与上述基于仿生超材料和数据驱动的定制化鞋底设计方法相对于现有技术所具有的优势相同,在此不做赘述。
49.本发明的另一目的在于提出一种电子设备,以解决相关技术中鞋底设计无法与定制对象的脚型精准匹配且实现受力均匀化的问题。
50.为达到上述目的,本发明的技术方案是这样实现的:
51.一种电子设备,包括处理器,存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现上述基于仿生超材料和数据驱动的定制化鞋底设计方法的步骤。
52.所述电子设备与上述基于仿生超材料和数据驱动的定制化鞋底设计方法相对于现有技术所具有的优势相同,在此不做赘述。
53.本发明的另一目的在于提出一种计算机可读存储介质,以解决相关技术中鞋底设计无法与定制对象的脚型精准匹配且实现受力均匀化的问题。
54.为达到上述目的,本发明的技术方案是这样实现的:
55.一种计算机可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现上述基于仿生超材料和数据驱动的定制化鞋底设计方法的步骤。
56.所述计算机存储介质与上述基于仿生超材料和数据驱动的定制化鞋底设计方法相对于现有技术所具有的优势相同,在此不做赘述。
57.相对于现有技术,本发明所述的基于仿生超材料和数据驱动的定制化鞋底设计方法方法具有以下优势:
58.本发明通过对定制对象的足部进行建模,得到足部模型,所述足部模型中至少包括足部各个点位的压力参数;对足底进行区域划分,得到多个足底区域,并基于所述足部各个点位的压力参数确定每个所述足底区域的目标弹性张量;基于所述每个足底区域的所述目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞;其中,所述仿生超材料元胞用于指示制作鞋底的仿生超材料的结构参数;基于多个所述足底区域对应的仿生超材料元胞,制作得到所述定制化鞋底。
59.本发明通过对定制对象进行足部建模使设计的鞋底与定制对象的脚型能够精准匹配,而根据足部建模得到的压力参数确定了鞋底各个区域所需的弹性张量,进而根据各个区域的弹性张量,设计不同区域的鞋底使得最后设计的不同区域的鞋底对足底的反作用力均匀,从而得到能够使足部受力均匀的鞋底,提升舒适性。
附图说明
60.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
61.图1示出了本发明实施例一提供的一种基于仿生超材料和数据驱动的定制化鞋底设计方法的步骤流程图;
62.图2示出了本发明又一实施例提供的一种基于仿生超材料和数据驱动的定制化鞋底设计方法的步骤流程图;
63.图3示出了本发明又一实施例中的足部几何模型和有限元模型;其中,图3(a)为足部几何模型;图3(b)为足部和鞋底的有限元模型;
64.图4示出了本发明又一实施例中的足底压力分布图;
65.图5示出了本发明又一实施例中足底区域划分图;
66.图6示出了本发明又一实施例中生成模型的训练过程;
67.图7示出了本发明又一实施例中预测模型的训练过程;
68.图8示出了本发明又一实施例中根据数据驱动模型得到目标弹性张量的仿生超材料元胞的方法;
69.图9示出了本发明又一实施例中基于仿生超材料元胞设计鞋底的结构图;其中,图9(a)为设计每个仿生超材料元胞的流程示意图;图9(b)为基于仿生超材料元胞得到定制化鞋底模型;
70.图10示出了本发明又一实施例中对定制化鞋底模型进行优化的方法步骤流程图;
71.图11示出了本发明又一实施例的基于仿生超材料和数据驱动的定制化鞋底设计方法的控制逻辑图;
72.图12示出了本发明实施例二提供的一种基于仿生超材料和数据驱动的定制化鞋底设计装置的结构示意图。
具体实施方式
73.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
74.下面将参考附图并结合实施例来详细说明本发明的一种基于仿生超材料和数据
驱动的定制化鞋底设计方法。
75.实施例一
76.图1是本发明实施例1提供的一种基于仿生超材料和数据驱动的定制化鞋底设计方法的步骤流程图,如图1所示,包括:
77.s101,对定制对象的足部进行建模,得到足部模型,所述足部模型中至少包括足部各个点位的压力参数。
78.具体地,通过对定制对象的足部建模得到定制对象的足部模型,进而根据该足部模型模拟足部站立在鞋底上时的压力分布,由此得到定制对象的足部压力分布确定每个几何点位上的压力分布情况。在本发明实施例中,可对定制对象的足部建模得到几何模型,通过将足部的几何模型导入有限元分析软件对足部各点位进行有限元分析,由此得到足部各个点位的压力参数。
79.在一些实施例中,对足部建模的同时,也对鞋底进行建模,由此可直接通过模型模拟出足部站立在鞋底上的情况,以直接通过有限元分析软件得到足底压力的分布情况,也就无需再通过传感器等方式对足底压力进行获取。
80.在一些实施例中,为满足鞋底与定制对象的脚型相贴合,除了获取足部各个点位的压力参数外,还需要获取定制对象的足弓部与鞋底水平面的高度差值数据,以在设计鞋底时,将足弓部区域的鞋底高度设计为与定制对象的脚部贴合。
81.s102,对足底进行区域划分,得到多个足底区域,并基于所述足部各个点位的压力参数确定每个所述足底区域的目标弹性张量。
82.由于足底不同部分的压力并不相同,为使设计出的鞋底能够达到受力均匀的效果,将足底划分为不同的区域,通过每个足底压力区域中的点位的压力参数,计算得到每个足底区域的鞋底对应的目标弹性张量,该目标弹性张量为鞋底材料所需的弹性张量,在每个足底区域的鞋底材料都为对应的目标弹性张量时,每个足底区域对于足部的反作用力相近,由此实现足底的受力均匀化。
83.在一些实施例中,根据足底形状即足底轮廓对足底进行划分,如根据足底轮廓画出贴合轮廓的四方形,再根据区域个数对四方形进行等分。
84.在一些实施例中,根据上述步骤s101得到的足底压力分布数据对足底区域进行划分。
85.待确定足底区域之后,根据足底区域内的多个点位压力参数可确定该足底区域内的整体压力,根据足底区域的整体压力来计算鞋底材料所需的目标弹性张量。
86.s103,基于所述每个足底区域的所述目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞;其中,所述仿生超材料元胞用于指示制作鞋底的仿生超材料的结构参数。
87.本发明实施例中,仿生超材料元胞表示单个区域中仿生超材料的结构,包括:该区域的仿生超材料的高度、内部结构,其中,仿生超材料的内部结构数据是调控该足底区域的仿生超材料的弹性张量的关键,通过调控仿生超材料元胞的内部结构可对对应的足底区域的弹性张量进行调控,使其满足对应足底区域的目标弹性张量。
88.其中,超材料是指一些具有人工设计的结构并呈现出天然材料所不具备的超常物理性质的复合材料,本发明采用的超材料为具有松质骨微观结构的仿生材料,以此在鞋底
的不同区域实现不同的弹性参数,进一步实现鞋底的均匀化,提升舒适度。
89.在一些实施例中,可对仿生超材料元胞的结构进行建模,以将仿生超材料元胞的结构参数化,以通过调整参数来调整仿生超材料元胞的结构。示例地,将仿生超材料元胞划分三维矩阵,矩阵中每个数字表示对应位置的局部体积分数,通过调整数字调整对应位置的体积分数,使得仿生超材料元胞的弹性张量变化。
90.s104,基于多个所述足底区域对应的仿生超材料元胞,制作得到所述定制化鞋底。
91.在得到了每个足底区域的仿生超材料元胞后,可得到鞋底的整体结构,即得到鞋底的整体模型,最后根据该鞋底模型制作得到的鞋底即是适合定制对象的鞋底。
92.本发明实施例通过对定制对象的足部进行建模获取了定制对象的足部各个点位的压力参数,进而在对足底进行区域划分时,通过各个点位的压力参数确认了不同区域的压力值,根据该压力值确定了不同区域鞋底材料所需的目标弹性张量,由于不同区域的鞋底材料都通过对应足底区域的目标弹性张量获得,使得足底压力不同的部分鞋底具备不同的弹性张量,通过不同的弹性张量来改变鞋底对足底的反作用力,使得最后足底感受到的反作用力趋于均匀,从而达到了受力均匀化的效果。
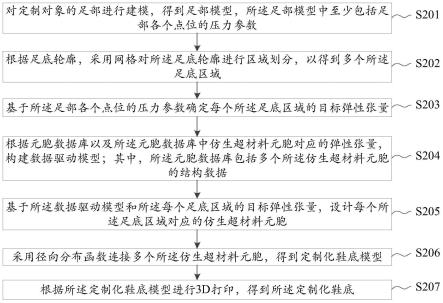
93.参照图2,图2示出了本发明又一实施例提供的一种基于仿生超材料和数据驱动的定制化鞋底设计方法,如图2所示,所述方法包括:
94.s201,对定制对象的足部进行建模,得到足部模型,所述足部模型中至少包括足部各个点位的压力参数。
95.具体地,通过3d扫描仪获取定制对象的足部点云数据再根据该足部点云数据进行足部建模,如图3(a)所示的足部几何模型,将足部与鞋底一同建模,并导入有限元分析软件,得到如图3(b)所示的足部和鞋底的有限元模型,通过对有限元模型进行分析可得到足部各个点位的压力参数、足弓部与水平面的高度差值、以及鞋底的应力场分布数据等相关数据用于鞋底的设计。在本发明实施例中,为实现鞋底受力均匀化,主要对足底压力进行分析,通过如图4所示的足底压力分布图来表示足底压力的分布情况,以方便后续划分足底区域后,对各个足底区域的压力进行计算。
96.s202,根据足底轮廓,采用网格对所述足底轮廓进行区域划分,以得到多个所述足底区域。
97.在发明实施例中,对足底区域的划分可如图5所示,根据足底轮廓采用网格对足底轮廓进行区域划分,将足底划分为多个区域。其中,足底区域的个数可根据不同场景确定,应用于一般的鞋靴售卖场景,如针对足部无疾病的定制对象,受力均匀化的精度要求并不高,划分的区域个数可较少;应用于医疗场景,对受力均匀化的精度要求较高,划分的区域个数可增加,由此,可通过网格划分的不同,实现不同场景的应用。
98.s203,基于所述足部各个点位的压力参数确定每个所述足底区域的目标弹性张量。
99.具体地,通过图4得到的足底各个点位的压力参数,以及图5的足底区域,根据每个足底区域中点位的压力参数计算得到每个足底区域的平均压力值,再根据每个足底区域的平均压力值计算鞋底所需的弹性张量,以实现鞋底的受力均匀化,从而将该弹性张量作为目标弹性张量来设计该足底区域的鞋底结构,以满足对应的目标弹性张量。
100.s204,根据元胞数据库以及所述元胞数据库中仿生超材料元胞对应的弹性张量,
构建数据驱动模型;其中,所述元胞数据库包括多个所述仿生超材料元胞的结构数据。
101.在本发明实施例中,为实现根据目标弹性张量设计仿生超材料元胞,通过对目标对象,进行ct扫描,获取目标对象的松质骨结构数据,将该结构数据作为仿生超材料的结构数据储存,建立得到元胞数据库,进而,在设计仿生超材料元胞时,可直接从数据库中提取,其中,目标对象为生物的松质骨如羊的股骨远端。
102.在建立元胞数据库后,还需确定元胞数据库中每个仿生超材料元胞的弹性张量,本发明实施例通过均匀化方法和有限元方法计算元胞数据库中每个仿生超材料元胞的弹性矩阵,采用弹性矩阵来表示仿生超材料的弹性张量。由于元胞数据库中的仿生超材料元胞数据有限,并不能完全包括不同弹性张量对应的仿生超材料元胞结构数据,通过数据驱动模型来设计每个足底区域对应的仿生超材料元胞。其中,数据驱动模型通过如下方式构建:
103.第一步:构建生成模型。
104.如图6所示,采用元胞数据库中的仿生超材料元胞作为样本,训练一个基于3d cnn(convolutional neural network,卷积神经网络)的生成对抗网络模型,具体地,将随机噪音向量输入生成对抗网络模型,由生成对抗网络模型的生成器得到一个仿生超材料元胞,再通过判别器判断该生成的元胞属于真样本或假样本。根据损失值迭代更新生成器和判别器的网络参数。生成对抗网络模型训练结束后,将该生成器作为生成模型,用于生成仿生超材料元胞。
105.第二步:构建预测模型。
106.通过元胞数据库中的仿生超材料元胞和对应的弹性张量作为样本训练预设模型,训练过程如图7所示,通过五个三维卷积层得到仿生超材料元胞的弹性张量,其中,仿生超材料元胞的弹性张量由弹性矩阵表示,再将预测得到的弹性矩阵作为标签y与卷积层输出的弹性矩阵比较,以计算损失值,通过损失值对预设模型的参数进行更新,重复上述过程,直至迭代预设次数或损失值小于预设值,进而将该预设模型作为预测模型,用于预测生成的仿生超材料元胞的弹性张量。
107.第三步,构建数据驱动模型。
108.将第一步获得的生成模型和第二步获得的预测模型耦合,得到数据驱动模型,即通过生成模型生成仿生超材料元胞,再根据预测模型预测生成的仿生超材料元胞的弹性张量。由此,可通过数据驱动模型直接得到新的仿生超材料元胞以及仿生超材料元胞对应的弹性张量。
109.本发明实施例中,通过提前构建数量达到10万个的仿生超材料元胞的元胞数据库,进行数据模型构建,保证样本数据足够多,使训练得到的数据驱动模型结果真实可靠。
110.s205,基于所述数据驱动模型和所述每个足底区域的目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞。
111.具体地,如图8所示,首先初始化一个随机向量z,将随机向量z输入数据驱动模型中,随机向量z被生成器转换为元胞数据x
′
后,预测模型预测出x
′
的弹性矩阵将与指定的弹性矩阵y进行对比,可计算出设计误差,再使用设计误差不断更新随机向量z的取值,直到设计出具有目标弹性张量的仿生超材料元胞为止。
112.之后,如图9(a)所示,对每个足底区域的仿生超材料元胞进行设计,得到多个仿生超材料元胞,使得每个足底区域的仿生超材料元胞都具备目标弹性张量。
113.在一些实施例中,除了考虑每个足底区域的目标弹性张量外,还考虑与足部的贴合程度,因此,在设计仿生超材料时,还通过足底区域的三维数据来调控仿生超材料的高度,以设计出既满足足底区域的高度要求,又满足目标弹性张量的仿生超材料元胞。
114.s206,采用径向分布函数连接多个所述仿生超材料元胞,得到定制化鞋底模型。
115.在得到每个足底区域的仿生超材料元胞后,为使仿生超材料元胞有序排列,采用径向分布函数连接每个足底区域的仿生超材料元胞,得到如图9(b)所示的定制化鞋底模型。
116.在一些实施例中,为保证定制化鞋底能够使足部受力均匀,在设计出定制化鞋底模型后,对定制化鞋底模型进行矫正,以得到均匀应力场的定制化鞋底。
117.具体地,参照图10,图10为本发明实施例中对定制化鞋底模型矫正的流程示意图,如图10所示,具体的矫正步骤包括:
118.首先,将步骤s201得到的足部模型与定制化鞋底模型进行有限元分析,模拟定制对象足部踩在定制化鞋底的情况,在此情况下进行有限元计算,得到定制化鞋底每个足底区域的接触应力以及定制化鞋底整体的平均接触应力。
119.接着,将所述鞋底每个足底区域的接触应力与平均接触应力相比较,以对与平均接触应力差值大于应力阈值的足底区域对应的仿生超材料元胞进行更新。
120.其中,可设置应力阈值,根据每个足底区域的接触应力与平均接触应力的差值与应力阈值的大小关系,确定是否需要对足底区域的仿生超材料元胞进行更新。压力阈值可以用于指示足底区域的接触应力与平均接触应力相差的大小是否超过可接受范围,即在差值小于等于应力阈值时,表示足底区域的接触应力与平均接触应力相差较小,同样能够起到受力均匀化的效果;在差值大于应力阈值时,则表示足底区域的接触应力与平均接触应力相差较大,可能影响鞋底的力学性能,而造成受力不均匀问题。因此,在足底区域的接触应力与平均接触差值小于等于应力阈值的情况下,不对仿生超材料元胞进行更新;在足底区域的接触应力与平均接触差值大于应力阈值的情况下,对足底区域的仿生超材料元胞进行更新。
121.之后,若是确定足底区域的接触应力与平均接触应力的差值大于应力阈值,则根据该足底区域的接触应力重新设计仿生超材料元胞,并将重新设计的仿生超材料元胞嵌入原定制化鞋底模型。
122.示例地,在确定足底区域的接触应力与平均接触应力的差值大于应力阈值时,若该足底区域的接触应力小于平均接触应力,则表示该足底区域的仿生超材料元胞的弹性模量较大,因此,通过降低对应足底区域的目标弹性模量,重新设计该足底区域的仿生超材料元胞,并将更新后的仿生超材料元胞替换对应足底区域的原始仿生超材料元胞。
123.然后,继续检测下一个足底区域的接触应力与平均接触应力的差值是否大于平均接触应力。在将所有接触应力与平均接触应力的差值大于压力阈值的足底区域的仿生超材料元胞更新后,则可重新得到定制化鞋底模型。
124.最后,重复上述步骤,直至所述定制化鞋底的每个足底区域的接触应力与平均接触应力的差值小于等于所述应力阈值。
125.具体地,为保证受力均匀化,在得到更新后的定制化鞋底模型后再对定制化鞋底和定制对象的足部进行建模,以确定是否还有接触应力与平均应力差值大于应力阈值的足底区域,进而在存在接触应力与平均应力差值大于应力阈值的足底区域的情况下,继续对足底区域的仿生超材料元胞进行更新,直到实现受力均匀化。
126.s207,根据所述定制化鞋底模型进行3d打印,得到所述定制化鞋底。
127.本发明实施例通过对定制对象的足部进行建模获取了定制对象的足部各个点位的压力参数,进而在对足底进行区域划分时,通过各个点位的压力参数确认了不同区域的压力值,根据该压力值确定了不同区域鞋底材料所需的目标弹性张量,由于不同区域的鞋底材料都通过对应足底区域的目标弹性张量获得,使得足底压力较大的部分鞋底的弹性张量较大而足底压力较小的部分鞋底的弹性张量较小,使得最后足底感受到的反作用力趋于均匀,从而达到了均匀化的效果。此外,本发明实施例采用数据驱动模型用于生成仿生超材料元胞,通过直接由模型设计仿生超材料元胞进而得到定制化鞋底,为定制化鞋底设计提供了一个综合性流程,且在设计定制化鞋底时可无需人工干预,使得制备定制鞋底更加方便。
128.下面结合一个具体示例对上述过程进行阐述:
129.参照图11,图11示出了本发明又一实施例中基于仿生超材料和数据驱动的鞋底设计方法的逻辑示意图,如图11所示,首先,采用3d扫描仪扫描得到定制对象的足部点云数据。根据足部点云数据,通过逆向工程软件生成脚部的几何模型。
130.将足部的几何模型和鞋底模型输入有限元分析软件进行有限元分析,得到足底压力分布图,进而得到足部各个点位的压力参数、足弓部与鞋底的高度差等数据。通过对足底进行区域划分得到多个足底区域,以及对应足底区域的足底压力参数,可以确定每个足底区域的目标弹性张量。
131.同时,通过体外ct扫描获取羊的股骨远端数据作为仿生超材料元胞的结构数据存储在元胞数据库中,以建立得到元胞数据库,并计算元胞数据库中每个仿生超材料的弹性张量,采用元胞数据库中的仿生超材料元胞的结构数据以及对应的弹性张量,通过模型训练得到数据驱动模型。其中,元胞数据库和数据驱动模型可提前建立。
132.由此,将每个足底区域的目标弹性模量输入到数据驱动模型中,即可设计得到每个足底区域的仿生超材料元胞,再将每个足底区域的仿生超材料元胞采用径向分布函数连接得到定制化鞋底模型,通过对定制化鞋底模型和定制对象的足部建模,确定定制化鞋底的接触应力,根据接触应力对定制化鞋底模型进行优化,使定制化鞋底中每个区域的接触应力都与平均接触应力相差较小,将优化后的定制化鞋底模型3d打印,即可得到定制化鞋底。
133.实施例二
134.参照图12,图12示出了本发明实施例提供的一种基于仿生超材料和数据驱动的定制化鞋底设计装置,如图12所示,包括:
135.建模模块1201,用于对定制对象的足部进行建模,得到足部模型,所述足部模型中至少包括足部各个点位的压力参数;
136.确定模块1202,用于对足底进行区域划分,得到多个足底区域,并基于所述足部各个点位的压力参数确定每个所述足底区域的目标弹性张量;
137.设计模块1203,用于基于所述每个足底区域的所述目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞;其中,所述仿生超材料元胞用于指示制作鞋底的仿生超材料的结构参数;
138.制作模块1204,用于基于多个所述足底区域对应的仿生超材料元胞,制作得到所述定制化鞋底。
139.在一些实施例中,所述设计模块1203还包括:
140.构建模块,用于根据元胞数据库以及所述元胞数据库中仿生超材料元胞对应的弹性张量,构建数据驱动模型;其中,所述元胞数据库包括多个所述仿生超材料元胞的结构数据;
141.设计子模块,用于基于所述数据驱动模型和所述每个足底区域的目标弹性张量,设计每个所述足底区域对应的仿生超材料元胞。
142.在一些实施例中,所述制作模块1204还包括:
143.第一获取模块,用于采用径向分布函数连接多个所述仿生超材料元胞,得到定制化鞋底模型;
144.制作子模块,用于根据所述定制化鞋底模型进行3d打印,制作得到所述定制化鞋底。
145.在一些实施例中,所述装置还包括:
146.第二获取模块,用于对所述定制对象的足部以及所述定制化鞋底进行有限元分析,以获取所述定制化鞋底的平均接触应力以及每个所述足底区域的接触应力;
147.第一更新模块,用于将所述鞋底每个所述足底区域的接触应力与所述平均接触应力相比较,以对与所述平均接触应力差值大于应力阈值的所述足底区域对应的仿生超材料元胞进行更新;
148.第二更新模块,用于采用更新后的所述仿生超材料元胞重新得到所述定制化鞋底模型。
149.在一些实施例中,所述确定模块1202还包括:
150.划分模块,用于根据足底轮廓,采用网格对所述足底轮廓进行区域划分,以得到多个所述足底区域;
151.第一确定子模块,用于基于每个所述足底区域中所包括的各个点位的所述压力参数,确定每个所述足底区域的平均压力值;
152.第二确定子模块,用于基于每个所述足底区域的所述平均压力值,确定每个所述足底区域对应的所述目标弹性张量。
153.在一些实施例中,所述建模模块1201还包括:
154.第三获取模块,用于通过3d扫描仪获取所述定制对象的足部点云数据;
155.建模子模块,用于基于所述足部点云数据,对所述定制对象进行足部建模得到所述定制对象的足部几何模型,并对所述定制对象足部与鞋底建模得到有限元模型;
156.第四获取模块,用于基于所述几何模型和所述有限元模型,获取所述足部各个点位的压力参数。
157.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内;
158.对于方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本发明并不受所描述的动作顺序的限制,因为依据本发明,某些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和部件并不一定是本发明所必须的。
159.以上对本发明所提供的一种基于仿生超材料和数据驱动的定制化鞋底设计方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1