机械凸轮杠杆计时计数器及其凸轮生成系统的制作方法
1.本发明涉及计数设备技术领域,具体为机械凸轮杠杆计时计数器及其凸轮生成系统。
背景技术:
2.现有的计数设备大多数采用电子机构设置,导致其观赏性较差,而一般的机械结构计数装置,其往往是通过人手动翻牌显示,功能性较差,且无法满足计数时的数值变化观赏需求,并且无法在计数或计时中任意切换,为此,我们提出机械凸轮杠杆计时计数器及其凸轮生成系统。
技术实现要素:
3.本发明的目的在于提供机械凸轮杠杆计时计数器及其凸轮生成系统,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:机械凸轮杠杆计时计数器,包括数字显示机构,所述数字显示机构设置为两组,两组所述数字显示机构之间通过连接机构连接,所述连接机构采用十进制或六进制,所述数字显示机构上连接有驱动机构;
5.所述数字显示机构包括安装架,所述安装架的下端铰接有驱动轴,所述驱动轴上安装有七组独立的凸轮连杆机构,所述凸轮连杆机构包括连接在驱动轴上的凸轮,所述凸轮的一侧贯穿安装架连接有控制齿轮,所述安装架上连接有下固定轴位于凸轮的一侧,所述连杆朝向凸轮的一侧表面连接有凸杆,所述连杆的下端安装有弹簧位于下固定轴表面,所述连杆的上端通过连接轴铰接连接杆一,所述连接杆一的前端通过连接轴铰接有连接杆二,所述连接杆二的上端通过上固定轴铰接在安装架上,所述连接杆二的表面通过固定杆连接有显示板,所述显示板垂直位于安装架的上方以呈显示状态,所述显示板水平位于安装架的后方以呈隐藏状态。
6.优选的,所述驱动机构包括安装在数字显示机构背面的电机,所述电机的输出轴上连接有驱动齿轮,所述安装架侧面通过安装轴铰接有连接齿轮,所述安装轴位于控制齿轮和驱动齿轮之间,所述安装轴同时和控制齿轮、驱动齿轮啮合连接。
7.优选的,所述凸杆上铰接有滑轮,所述滑轮抵触在凸轮的表面。
8.优选的,七组所述显示板均呈显示状态时组成数字“8”状态。
9.优选的,所述连接机构由大齿轮一、大齿轮二、小齿轮一、小齿轮二、被动同步齿轮、主动同步齿轮组成,所述被动同步齿轮和主动同步齿轮分别安装在两组数字显示机构中的驱动轴上,所述大齿轮一和大齿轮二为一体结构,所述小齿轮一和小齿轮二呈同心圆分布且连接为一体结构,所述小齿轮一和大齿轮一、被动同步齿轮啮合连接,所述小齿轮二和大齿轮二啮合连接,所述大齿轮一、大齿轮二、被动同步齿轮、主动同步齿轮呈同心圆分布,所述大齿轮一、大齿轮二和主动同步齿轮同步转动。
10.优选的,凸轮生成系统包括重复操作模块、点映射模块、三角函数模块、三角函数
计算模块、明度值计算模块、矢量转换实数模块、实数转换矢量模块,内径输入模块、外径输入模块、内外径差值计算模块、计算模块一、计算模块二、点显示模块。
11.优选的,所述点映射模块将凸轮弧度转换为360
°
,同时设置映射点的数量并将映射点的数量依次映射至360
°
上,所述三角函数模块计算点的数值,所述内径输入模块和外径输入模块输入数值定义凸轮生成的内外径大小,所述三角函数计算模块结合定义凸轮的内外径生成新的点的数值,并将该数值传输至所述实数转换矢量模块,从而得出点在平面凸轮上的位置,所述重复操作模块重复上述步骤,直至点映射模块所有点完成计算,得出凸轮平面形状。
12.优选的,所述明度值计算模块对图17进行高斯模糊,使所述点映射模块中的点带入明度值计算模块内后,生成新的实数,所述内外径差值计算模块得出内外径差值数值,使矢量转换实数模块对明度值计算模块中得出的数值进行操作,所述计算模块一将俩组数值进行计算,完成计算后在通过所述计算模块而进行二次计算,并带入所述三级函数计算模块中,通过所述实数转换矢量模块生成更加圆滑的凸轮。
13.优选的,所述明度值计算模块对二进制黑白图进行高斯模糊时,先对图17的像素点进行整数倍放大。
14.优选的,所述明度值计算模块对二进制黑白图进行像素点整数倍放大时需进行差值限定。
15.与现有技术相比,本发明的有益效果是:
16.1、本方案通过数字显示机构的结构设置,可以动态显示数字的变化过程,并且通过驱动机构驱动数字显示机构运行,使得数字显示机构可以自动进行数字变换,从而实现计数,并且观赏性较强;
17.2、本方案通过数字显示机构和连接机构的结构设置,使得两组数字显示机构之间通过连接机构进行传动连接,而连接机构可采用十进制或六进制,使得两组数字显示机构之间数字变化的进制方式不同,当连接机构采用六进制时,本装置可以当作计时使用,当连接机构采用十进制时,本装置可以当作计数使用,功能性较强;
18.3、本方案通过机械凸轮杠杆计时计数器的凸轮生成系统,使得用户可以根据三角函数的结合与凸轮的内外径大小生成不同的凸轮,使得凸轮连杆机构可以直接配合得出所显示的数字,提高便捷性。
附图说明
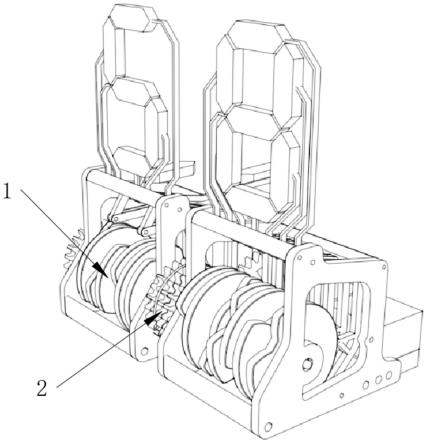
19.图1为本发明结构俯视示意图;
20.图2为本发明结构后视示意图;
21.图3为本发明结构侧视示意图;
22.图4为本发明结构正视示意图;
23.图5为本发明数字显示机构结构示意图;
24.图6为本发明数字显示机构结构后视示意图;
25.图7为本发明凸轮连杆机构侧视结构示意图;
26.图8为本发明凸轮连杆机构结构示意图;
27.图9为本发明凸轮连杆机构结构后视示意图;
28.图10为本发明凸轮连杆机构结构展开示意图;
29.图11为本发明连接机构结构示意图;
30.图12为本发明连接机构结构爆炸示意图;
31.图13为本发明连接机构部分结构示意图;
32.图14为本发明连接机构部分结构示意图;
33.图15为本发明连接机构部分结构示意图;
34.图16为本发明连接机构部分结构示意图;
35.图17为本发明转换二进制黑白示意图;
36.图18为本发明凸轮连杆机构数字显示示意图;
37.图19为本发明凸轮连杆机构线性运动示意图;
38.图20为本发明系统流程示意图;
39.图21为本发明系统示意图。
40.图中:1、数字显示机构;101、安装架;102、驱动轴;103、凸轮;104、控制齿轮;105、安装轴;106、连接齿轮;107、连杆;108、下固定轴;109、弹簧;110、凸杆;111、滑轮;112、连接轴;113、连接杆一;114、连接杆二;115、上固定轴;116、固定杆;117、显示板;2、连接机构;201、大齿轮一;202、大齿轮二;203、小齿轮一;204、小齿轮二;205、被动同步齿轮;206、主动同步齿轮;3、驱动机构;301、电机;302、驱动齿轮。
具体实施方式
41.实施例一
42.请参阅图1-21,本发明提供一种技术方案:
43.机械凸轮杠杆计时计数器,本装置由两组数字显示机构1、连接机构2、驱动机构3组成,两组数字显示机构1之间通过连接机构2连接,使得两组数字显示机构1之间可以同步运行,并且通过连接机构2的十进制或六进制设置,使得两组数字显示机构1可以用于计数或计时,并且驱动机构3可以安装在第一组数字显示机构1上,用于驱动两组数字显示机构1的运行。
44.数字显示机构1包括安装架101,安装架101的下端铰接有驱动轴102,并且驱动轴102上安装有七组独立的凸轮连杆机构,其中凸轮连杆机构包括连接在驱动轴102上的凸轮103,并且凸轮103的一侧贯穿安装架101连接有控制齿轮104,而驱动机构3包括安装在数字显示机构1背面的电机301,电机301的输出轴上连接有驱动齿轮302,同时安装架101侧面通过安装轴105铰接有连接齿轮106,并且安装轴105位于控制齿轮104和驱动齿轮302之间,且安装轴105同时和控制齿轮104、驱动齿轮302啮合连接,使得电机301开启后驱动驱动齿轮302转动,通过驱动齿轮302啮合连接齿轮106带动控制齿轮104转动,进一步通过控制齿轮104连接着驱动轴102表面的七组凸轮103转动,从而实现对凸轮连杆机构驱动运行;
45.安装架101上连接有下固定轴108位于凸轮103的一侧,而连杆107朝向凸轮103的一侧表面连接有凸杆110,并且凸杆110上铰接有滑轮111,滑轮111抵触在凸轮103的表面,由于凸轮103为凸轮,因此凸轮103的表面具有凹面和凸面,使得凸轮103在转动过程中随着表面的半径的变化,会推动凸杆110连接着连杆107在下固定轴108上摆动,而滑轮111可以使凸轮103在转动过程中更好的推动凸杆110摆动,减少摩擦力,同时连杆107的下端安装有
弹簧109位于下固定轴108表面,使得连杆107在没有外力影响下,会通过弹簧109的弹性作用力始终将滑轮111抵触在凸轮103的表面,使得凸轮103在转动过程中,无论是凸面或凹面均可控制连杆107在下固定轴108上摆动到不同角度位置;
46.连杆107的上端通过连接轴112铰接连接杆一113,连接杆一113的前端通过连接轴112铰接有连接杆二114,而连接杆二114的上端通过上固定轴115铰接在安装架101上,使得凸轮103在转动过程中会带动连杆107进行摆动,进一步使得连杆107连接着连接杆一113进行转动,从而控制连接杆一113带动连接杆二114进行摆动,连接杆二114的表面通过固定杆116连接有显示板117,使得连接杆二114在摆动过程中可以控制显示板117转动;
47.由于凸轮103的表面具有凹面和凸面,当滑轮111抵触在凸轮103的凸面上时,会控制连杆107连接着固定杆116转动,使得显示板117垂直位于安装架101的上方,以呈显示状态,或当滑轮111抵触在凸轮103的凹面上时,会控制连杆107连接着固定杆116转动,使得显示板117水平位于安装架101的后方,以呈隐藏状态;
48.通过安装架101上安装有七组凸轮连杆机构,七组凸轮连杆机构中共有七组显示板117,当七组显示板117均呈显示状态时,可以组成数字“8”,进一步使得七组凸轮连杆机构的配合运行,使得数字显示机构1上可以动态显示“0”至“9”十个数字,从而由于计时或计数。
49.并且两组数字显示机构1之间可以通过连接机构2进行同步驱动,使得两组数字显示机构1可以同时显示两组数字,当连接机构2为六进制时,两组数字显示机构1可以用于计时,当连接机构2为十进制时,两组数字显示机构1可以用于计数;
50.连接机构2由大齿轮一201、大齿轮二202、小齿轮一203、小齿轮二204、被动同步齿轮205、主动同步齿轮206组成,其中被动同步齿轮205和主动同步齿轮206分别用于安装在两组数字显示机构1中的驱动轴102上,使得驱动机构3驱动数字显示机构1运行时,通过驱动轴102可以驱动主动同步齿轮206同步转动,进一步使得连接机构2驱动运行;
51.大齿轮一201和大齿轮二202呈同心圆分布且连接为一体结构,而小齿轮一203和小齿轮二204呈同心圆分布且连接为一体结构;
52.当连接机构2需要安装时,将主动同步齿轮206安装在连接有驱动机构3的数字显示机构1上,使得主动同步齿轮206和该数字显示机构1上的驱动轴102传动连接,同时将大齿轮一201和大齿轮二202安装在主动同步齿轮206上,通过被动同步齿轮205安装在被动运行的数字显示机构1中的驱动轴102上,并且大齿轮一201、大齿轮二202、被动同步齿轮205、主动同步齿轮206呈同心圆分布,且大齿轮一201、大齿轮二202和主动同步齿轮206同步转动,同时在被动运行的数字显示机构1上安装小齿轮一203和小齿轮二204,并且小齿轮一203设置为两组,小齿轮二204和两组小齿轮一203呈同心圆分布且同轴运行,两组小齿轮一203分别和被动同步齿轮205、大齿轮一201啮合连接,使得小齿轮一203转动时会连接着被动同步齿轮205转动,而大齿轮二202和小齿轮二204啮合连接,使得主动同步齿轮206转动时带动大齿轮二202啮合小齿轮二204转动,同时另一组小齿轮一203啮合大齿轮一201转动,进一步使得大齿轮一201、大齿轮二202、主动同步齿轮206转动时会带动小齿轮二204转动,通过小齿轮二204带动两组小齿轮一203转动,进一步实现被动同步齿轮205的转动,使得两组数字显示机构1之间可以同步转动,并采用六进制或十进制运行,而连接机构2采用六进制或十进制时,只需对连接机构2多个齿轮的齿数进行比列设置,便可实现六进制的同
步。
53.当本装置计时使用时,由于主动驱动的数字显示机构1需显示十个数,被动驱动的数字显示机构1需显示六个数,所以连接机构2采用六进制,通过被动同步齿轮205转动十圈后控制主动同步齿轮206转动一圈,进一步实现主动驱动的数字显示机构1显示十个数字后,被动驱动的数字显示机构1显示一个数字:
54.大齿轮一201的表面仅设置有三个凸齿和小齿轮一203啮合连接,因此大齿轮一201的凹面无法和小齿轮一203啮合,同理,大齿轮二202的表面仅设置有三个凹齿和小齿轮二204啮合连接,因此大齿轮二202的凹面无法和小齿轮二204啮合,并且大齿轮一201表面的凸齿和大齿轮二202表面的凹齿呈呈重叠分布;
55.而小齿轮一203的齿数设置为八个,且小齿轮二204的齿数设置为四个,因此主动同步齿轮206带动大齿轮二202和大齿轮一201转动过程中,大齿轮二202和大齿轮一201分别啮合小齿轮二204和小齿轮一203转动,而大齿轮一201和小齿轮一203啮合三个齿转动后,会控制大齿轮二202啮合小齿轮二204转动,而大齿轮二202和小齿轮二204只会有俩个齿啮合转动,因此大齿轮二202转动一圈后只会带动小齿轮二204转动半圈,因此当大齿轮二202转动360
°
后,小齿轮二204只会转动180
°
;
56.将被动同步齿轮205设置为齿数设置为二十四个,而小齿轮一203的齿数设置为八个,因此被动同步齿轮205和小齿轮一203的速比为1:3,所以小齿轮一203啮合被动同步齿轮205转动时,小齿轮一203转动三圈后才会啮合被动同步齿轮205转动一圈,同时被动同步齿轮205由于驱动被动运行的数字显示机构1运行,因此被动同步齿轮205转动一圈时只需显示六个数字,每个数字对应的角度为60
°
,因此控制连接机构2实现六进制转动;
57.同理连接机构2可以实现十进制运行,从而控制本装置由于计时或计数。
58.实施例二
59.请参阅图1-21,在实施例一的基础上,本发明提供一种技术方案:
60.机械凸轮杠杆计时计数器的凸轮生成系统,首先凸轮103由于显示“0-9”十个数字,因此凸轮103具有十种变化,同时凸轮103的表面具有凸面和凹面,当凸轮连杆抵触在凸轮103的凸面上时,显示板117为显示状态,反之,当凸轮连杆抵触在凸轮103的凹面面上时,显示板117为隐藏状态;
61.数字显示机构1需显示十个数字,十个数字通过七组显示板117进行组合显示,如图18所示,对七组显示板117进行编号,并且对小齿轮一203表面的凸面和凹面进行定义,凸面为“0”不显示,而凸面为“1”显示,如图17所示,“0”为填充格,“1”为空白格,从而得出二进制黑白图;
62.如图19所示,根据图17对七组显示板117显示同步数字时,将七组凸轮103转换成线性图,再结合图19所示系统,通过下述公式生成凸轮:
63.x=sin[(2π/n)*i]*{[(r-r)*v]+r}
[0064]
y=cos[(2π/n)*i]*{[(r-r)*v]+r}
[0065]
其中:
[0066]
2π:弧度制,对应360
°
;
[0067]
n:点的总数量;
[0068]
i:点的id编号;
[0069]
v:明度值;
[0070]
r:内径输入值;
[0071]
r:外径输入值。
[0072]
通过上述公式便可得出凸轮的形状。
[0073]
机械凸轮杠杆计时计数器的凸轮生成系统,如图21所示:
[0074]
首先,通过点映射模块将凸轮弧度转换为360
°
,同时设置映射点的数量,并将映射点的数量依次映射至360
°
上(并且映射点的数量越多,凸轮的表面越圆滑),并通过三角函数模块计算点的数值;
[0075]
其次,通过内径输入模块和外径输入模块输入数值,定义凸轮生成的内外径大小,再通过三角函数计算模块结合定义凸轮的内外径生成新的点的数值,并将该数值传输至实数转换矢量模块,从而得出点在平面凸轮上的位置;
[0076]
最后,通过重复操作模块重复上述步骤,直至点映射模块所有点完成计算,得出凸轮平面形状。
[0077]
通过上述步骤可以生成凸轮,但凸轮表面凹陷或凸起部分为直接变化,导致凸轮表面不够圆滑,因此结合附图17,对凸轮边缘进行正态分布计算,使得凸轮表面凸起和凹陷处更加圆滑:
[0078]
首先,通过明度值计算模块对图17中二进制黑白图进行高斯模糊,使得点映射模块中的点带入明度值计算模块内后,生成新的实数(并且图17中二进制黑白图为7*10个像素点,首先对图17像素点进行放大,乘以整数,并对放大后的像素点进行差值限定,使得点映射模块中的点带入明度值计算模块内后,生成新的实数为中间值);
[0079]
其次,内径输入模块和外径输入模块定义凸轮内外径后,通过内外径差值计算模块得出数值,通过矢量转换实数模块对明度值计算模块中得出的数值进行操作,通过计算模块一将俩组数值进行计算,完成计算后在通过计算模块而进行二次计算,从而带入三级函数计算模块中,通过实数转换矢量模块生成更加圆滑的凸轮。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1