一种多视角的激光三维扫描系统的迭代标定方法与流程
本发明属于激光三维扫描系统相关,具体涉及一种多视角的激光三维扫描系统的迭代标定方法。
背景技术:
1、目前激光三维扫描系统在标定的过程中需要令设备和已知的标定物形成一定的姿态关系,并约束在阈值内,到达阈值约束范围后,采集对应的图像数据用于后续解算。但因为手持激光三维扫描仪是手持设备是一个6dof的自由状态,需要约束xyz三轴和xyz每个轴向上的角度。传统的引导方法多采用2d方式,单视角引导,用户非常难将设备移动到指定位置完成的对应的图像数据的采集。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种多视角的激光三维扫描系统的迭代标定方法,以解决传统的引导方法多采用2d方式,单视角引导,用户非常难将设备移动到指定位置完成的对应的图像数据的采集的问题。
2、本发明其中一个实施例提供了一种多视角的激光三维扫描系统的迭代标定方法,包括:
3、标定板,用于用户构建世界坐标系,所述世界坐标系中心根据已知的真实的所述标定板按照比例关系和期望用户到达的标定阈值渲染出图像标定板;
4、激光三维扫描系统,用于约束期待用户移动到的x,y,z和三轴对应的角度,并将扫描后的3d模型显示到所述世界坐标系中;
5、其中,所述激光三维扫描系统包括辅助指针、第一调节信号和第二调节信号;
6、所述辅助指针用来辅助判断左右的旋转角度,用所述辅助指针的方式引导用户居中;
7、所述第一调节信号用于辅助用户对准高度和角度;
8、所述第二调节信号用于辅助用户对准标定板中心;
9、其中,所述第一调节信号的颜色与第二调节信号的颜色互不相同。
10、在其中一实施例中,所述激光三维扫描系统还包括:
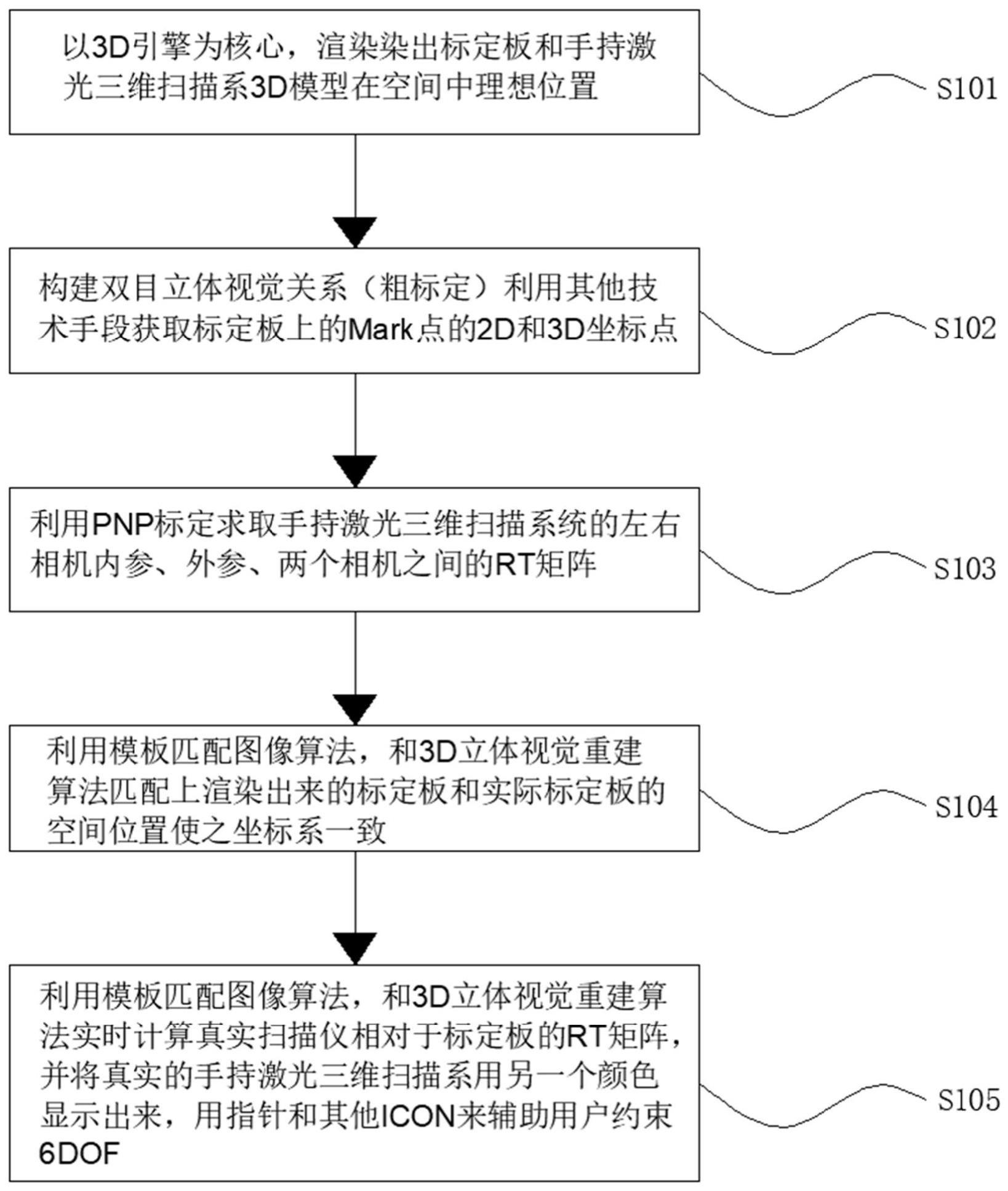
11、双目立体视觉关系,用于获取所述标定板上的mark点精确的2d和3d坐标点,若所述标定板上的mark坐标为已知,利用已知的mark点信息代入平面模拟合法或pnp算法即可求得;
12、单相机,所述单相机相对于所述世界坐标系的rt矩阵、畸变系数,通过双相机构成的双目立体视觉关系观测同一标定板则可求出相机之间的rt矩阵关系。
13、在其中一实施例中,所述激光三维扫描系统还包括:
14、同名点匹配算法,通过所述同名点匹配算法则可求出mark点在空间中的定位关系,即可求出真实三维扫描仪系统在空间中的姿态和位置信息,并显示在世界坐标系中。
15、在其中一实施例中,当用户按下ui交互开始标定按钮开始标定,所述激光三维扫描系统通过图像匹配算法和3d立体视觉重建算法计算出来的所述标定板的位置、先验标定板的2d坐标点信息进行计算;
16、其中,通过前者的刚体变化,通过真实求解的姿态和原来已知的所述标定板的位置信息求解即可求解两者之间的rt转换矩阵,求得姿态矩阵后即可完成坐标系的统一和对齐,以便于在同一个坐标系下引导用户到达预期指定位置;
17、通过不停地实时解算,实时渲染真实的所述激光三维扫描系统和理想所述激光三维扫描系统以及所述标定板在同一个世界坐标系的位置。
18、在其中一实施例中,所述辅助指针和其他icon来辅助用户约束6dof。
19、在其中一实施例中,当用户移动设备使得所述激光三维扫描系统的3d模型的真实位置和理想位置重合且在期待阈值内,所述3d模型的真实位置和理想位置重合且在期待阈值大于50%重合,则判断真实的扫描仪已经进入理想采集位置,则进行图像抓取;
20、其中,所述阈值可随意设定。
21、在其中一实施例中,当图像进行抓取的过程中,标准模型在显示上不运动,用户只需要将实时计算的真实模型靠到标准位置模型上,其中icon辅助用户到达期待用户到达的位置。
22、在其中一实施例中,当一个位置引导完成,完成一次采集后,则刷新渲染下一个位置的标准模型,继续引导用户完成下一个姿态的采集。
23、在其中一实施例中,重复所述引导过程直到n幅图像采集完成,进行精细标定计算,更新所述激光三维扫描系统的左右相机内参、外参、两个相机之间的rt矩阵。
24、在其中一实施例中,所述激光三维扫描系统以3d引擎为核心,渲染出标定板和激光三维扫描系统扫描的3d模型在空间中理想位置。
25、以上实施例所提供的一种多视角的激光三维扫描系统的迭代标定方法具有以下有益效果:
26、1、用户通过标定板构建世界坐标系,并通过激光三维扫描系统将扫描的3d模型和标定板显示在空间中理想的位置,3d模型可以以3d多视角显示出来,其中辅助指针用来辅助判断3d模型左右的旋转角度,用辅助指针的方式引导用户居中,第一调节信号用来辅助用户对准高度和角度,第二调节信号为下部红色辅助十字来辅助用户对准标定板中心,多角度约束目标点,使得设备需要被移动到的位置能清晰地呈现出来,且本发明的一种多视角的激光三维扫描系统的迭代标定方法同样可以采用2d方式,利用单视角进行引导,给用户多种选择。
27、2、当用户按下ui交互开始标定按钮开始标定,激光三维扫描系统通过图像匹配算法和3d立体视觉重建算法计算出来的标定板的位置,和标定板的2d坐标点信息进行计算。因为这几者为刚体变化,所以利用真实求解的姿态和原来已知的标定板的位置信息求解即可求解两者之间的rt转换矩阵,求得姿态矩阵后即可完成坐标系的统一和对齐,以便于在同一个坐标系下引导用户到达预期指定位置。通过不停地实时解算,实时渲染真实的手持激光三维扫描系和理想手持激光三维扫描系以及标定板在同一个世界坐标系的位置,本发明实时计算和显示设备当前位置,实时显示希望引导用户到达的位置,友好的引导使得用户移动三维扫描设备到指定位置,完成数据的采集。
技术特征:
1.一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,包括:
2.如权利要求1所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,
3.如权利要求1所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,
4.如权利要求3所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,
5.如权利要求1所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,
6.如权利要求1所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,
7.如权利要求3所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,
8.如权利要求3所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,
9.如权利要求3所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,
10.如权利要求1所述的一种多视角的激光三维扫描系统的迭代标定方法,其特征在于,所述激光三维扫描系统还包括:
技术总结
本发明属于激光三维扫描系统相关技术领域,具体涉及一种多视角的激光三维扫描系统的迭代标定方法,包括:标定板,用于用户构建世界坐标系,所述世界坐标系中心根据已知的真实的所述标定板按照比例关系和期望用户到达的标定阈值渲染出图像标定板;激光三维扫描系统,用于约束期待用户移动到的X,Y,Z和三轴对应的角度。用户通过标定板构建世界坐标系,并通过激光三维扫描系统将扫描的3D模型和标定板显示在空间中理想的位置,3D模型可以以3D多视角显示出来,其中辅助指针用来辅助判断3D模型左右的旋转角度,用辅助指针的方式引导用户居中,且本发明同样可以采用2D方式,利用单视角进行引导,给用户多种选择。
技术研发人员:茹方军,李冠楠,魏爱权
受保护的技术使用者:杭州非白三维科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!