一种基于GPU的深度图滤波方法、系统、设备及存储介质与流程
本发明涉及测绘图像处理,更具体地,涉及一种基于gpu的深度图滤波方法、系统、设备及存储介质。
背景技术:
1、多视图立体匹配算法在得到深度图后,由于影像遮挡、可见影像过少等原因,深度图会出现一些不规则的噪声区域,目视效果不佳且影响质量精度,因此需要对深度图进滤波等后处理,包括中值滤波,连通域检测等。其中,中值滤波能够有效去除视差图中孤立的噪点;而连通域检测能够检测出视差图中因噪声引起小团块(blob),方便去除小的噪声连通区或者进行插值填补空洞。
2、传统的连通域检测方法基于cpu执行,使用基于图像角点扩散的方式去全局式搜索大小连通区,然而该方法在影像分辨率较高或者场景范围大的情况下存在耗时久,效率低下的问题,而且基于图像角点扩散的深度图滤波方法因为强依赖邻居像素的信息,相邻像素之间的的计算不独立,从扩散原理上来说不适合并行设计。
技术实现思路
1、本发明为克服上述现有技术所述的深度图滤波方法在影像分辨率较高或者场景范围大的情况下存在耗时久、效率低下的缺陷,提供一种基于gpu的深度图滤波方法及系统。
2、为解决上述技术问题,本发明的技术方案如下:
3、一种基于gpu的深度图滤波方法,包括以下步骤:
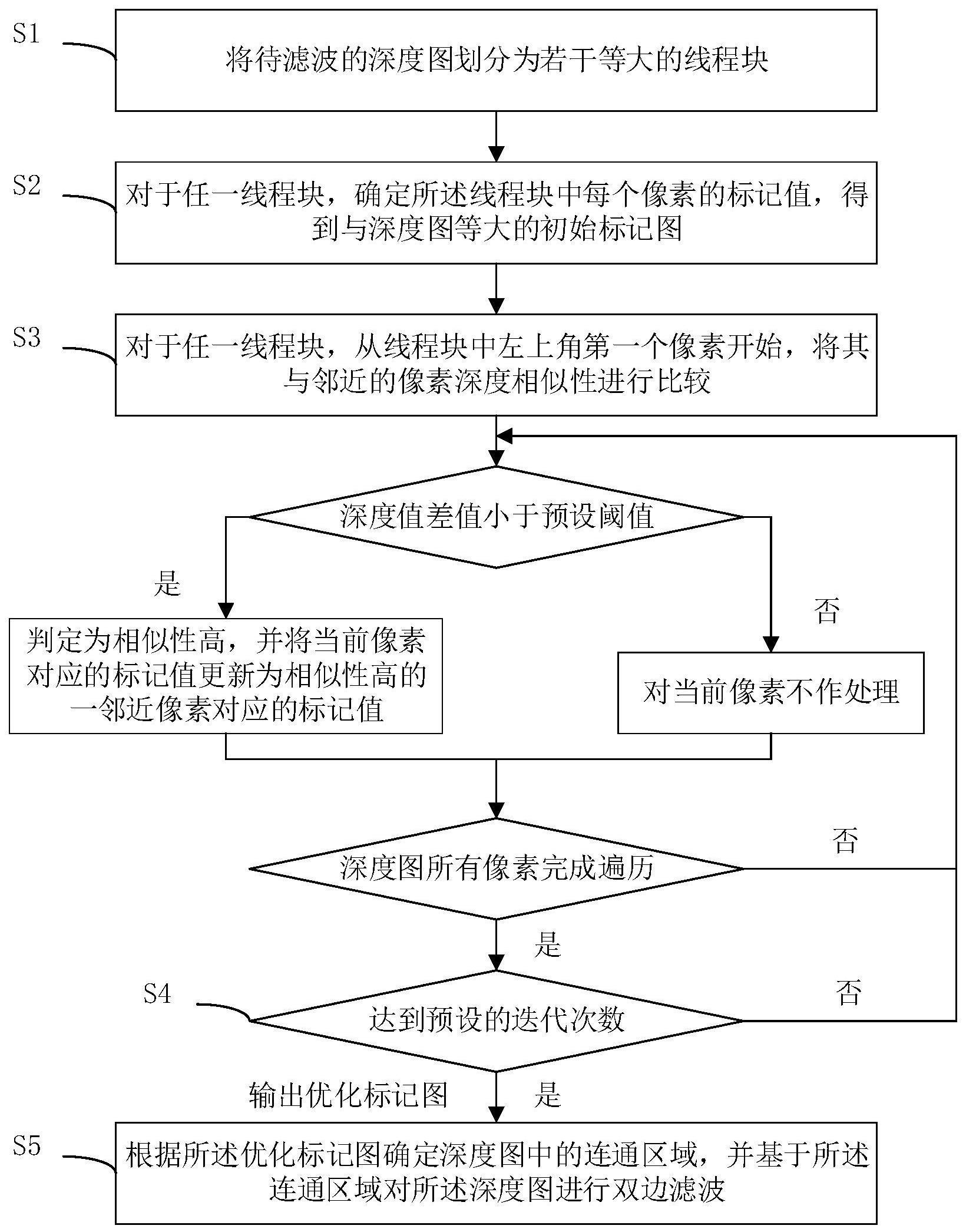
4、s1、将待滤波的深度图划分为若干等大的线程块;
5、s2、对于任一线程块,确定所述线程块中每个像素的标记值,得到与深度图等大的初始标记图;
6、s3、对于任一线程块,从线程块中左上角第一个像素开始,将其与邻近的像素深度相似性进行比较:若存在深度值差值小于预设阈值时,则判定为相似性高,并将当前像素对应的标记值更新为相似性高的一邻近像素对应的标记值;否则,判定为相似性低,对当前像素不作处理;完成遍历后得到更新的标记图;
7、s4、重复s3步骤直至达到预设的迭代次数,输出优化标记图;
8、s5、根据所述优化标记图确定深度图中的连通区域,并基于所述连通区域对所述深度图进行双边滤波;
9、其中,采用gpu对所有线程块并行执行s2~s4步骤。
10、作为优选方案,所述s2步骤中,确定所述线程块中每个像素的标记值的步骤包括:
11、s2.1、对于任一线程块,根据像素的行数r和列数c确定初始索引值label;其表达式为:
12、label=w×r+c
13、式中,w为深度图的宽度值;
14、s2.2、将所述初始索引值label作为当前像素的标记值;遍历所述线程块中所有像素后,生成与深度图匹配的初始标记图。
15、作为优选方案,所述s3步骤中,所述邻近的像素包括位于当前像素上侧的像素,以及位于当前像素左侧的像素。
16、作为优选方案,所述s5步骤中,根据所述优化标记图确定深度图中的连通区域的步骤包括:根据所述优化标记图,将所有标记值相同的像素作为连通区域,并基于所述连通区域对所述深度图进行双边滤波。
17、作为优选方案,所述s5步骤中,根据所述优化标记图,将所有标记值相同的像素作为连通区域,还包括以下步骤:对于任一连通区域,从所述优化标记图中查找上左方向是否存在相邻的连通区域,若是,则将上左方向最相邻的连通区域相应的标记值来更新当前连通区域所有像素的标记值,对连通区域进行更新确认;重复上述步骤至达到预设的更新阈值,获得完成更新的连通区域。
18、作为优选方案,所述s5步骤中,还包括以下步骤:统计各个连通区域中标记值相同的像素个数count并与预设的面积阈值比较:若count小于或等于预设的面积阈值,则将该连通区域判定为细碎连通区域,并对所述细碎连通区域利用邻近深度值进行内插填补;否则,保留该连通区域。
19、进一步地,本发明还提出了一种基于gpu的深度图滤波系统,应用于本发明提出的基于gpu的深度图滤波方法。所述深度图滤波系统中包括:
20、预处理模块,用于将待滤波的深度图划分为若干等大的线程块;
21、gpu模块,包括若干标记单元和若干相似性比较单元,且所述标记单元和相似性比较单元并行工作;
22、其中,所述标记单元用于确定当前线程块中每个像素的标记值;
23、所述相似性比较单元用于对当前线程块中的像素进行遍历,从线程块中左上角第一个像素开始,将其与邻近的像素深度相似性进行比较:若存在深度值差值小于预设阈值时,则判定为相似性高,并将当前像素对应的标记值更新为相似性高的一邻近像素对应的标记值;否则,判定为相似性低,对当前像素不作处理;
24、所述相似性比较单元迭代工作至达到预设的迭代次数,输出与深度图等大的优化标记图;
25、滤波模块,用于根据所述优化标记图确定深度图中的连通区域,并基于所述连通区域对所述深度图进行双边滤波,输出完成滤波的深度图。
26、作为优选方案,所述滤波模块中还包括细碎区域滤波单元,用于统计各个连通区域中标记值相同的像素个数count并与预设的面积阈值比较:若count小于或等于预设的面积阈值,则将该连通区域判定为细碎连通区域,并对所述细碎连通区域利用邻近深度值进行内插填补;否则,保留该连通区域。
27、进一步地,本发明还提出了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现本发明提出的基于gpu的深度图滤波方法的步骤。
28、进一步地,本发明还提出了一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现本发明提出的基于gpu的深度图滤波方法的步骤。
29、与现有技术相比,本发明技术方案的有益效果是:本发明将深度图划分为若干等大的线程块,进一步采用gpu对所有线程块并行处理,对于影像分辨率较高或者场景范围大的深度图,能够有效提高深度图滤波效率;本发明采用标记值对相似性高的像素进行标记,便于连通区域的查找,降低计算资源需求。
技术特征:
1.一种基于gpu的深度图滤波方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于gpu的深度图滤波方法,其特征在于,所述s2步骤中,确定所述线程块中每个像素的标记值的步骤包括:
3.根据权利要求1所述的基于gpu的深度图滤波方法,其特征在于,所述s3步骤中,所述邻近的像素包括位于当前像素上侧的像素,以及位于当前像素左侧的像素。
4.根据权利要求1~3任一项所述的基于gpu的深度图滤波方法,其特征在于,所述s5步骤中,根据所述优化标记图确定深度图中的连通区域的步骤包括:
5.根据权利要求4所述的基于gpu的深度图滤波方法,其特征在于,所述s5步骤中,根据所述优化标记图,将所有标记值相同的像素作为连通区域,还包括以下步骤:
6.根据权利要求5所述的基于gpu的深度图滤波方法,其特征在于,所述s5步骤中,还包括以下步骤:
7.一种基于gpu的深度图滤波系统,应用于权利要求1~6任一项所述的基于gpu的深度图滤波方法,其特征在于,所述系统包括:
8.根据权利要求7所述的基于gpu的深度图滤波系统,其特征在于,所述滤波模块中还包括细碎区域滤波单元,用于统计各个连通区域中标记值相同的像素个数count并与预设的面积阈值比较:若count小于或等于预设的面积阈值,则将该连通区域判定为细碎连通区域,并对所述细碎连通区域利用邻近深度值进行内插填补;否则,保留该连通区域。
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1~6中任一项所述的基于gpu的深度图滤波方法的步骤。
10.一种存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1~6中任一项所述的基于gpu的深度图滤波方法的步骤。
技术总结
本发明提出一种基于GPU的深度图滤波方法,包括:将待滤波的深度图划分为若干等大的线程块;对于任一线程块,确定线程块中每个像素的标记值,得到与深度图等大的初始标记图;对于任一线程块,从线程块中左上角第一个像素开始,将其与邻近的像素深度相似性进行比较:若存在深度值差值小于预设阈值时,则判定为相似性高,并将当前像素对应的标记值更新为相似性高的一邻近像素对应的标记值;否则,判定为相似性低,对当前像素不作处理;完成遍历后得到更新的标记图;重复该步骤直至达到预设的迭代次数,输出优化标记图;根据优化标记图确定深度图中的连通区域,并基于连通区域对深度图进行双边滤波;其中,采用GPU对所有线程块并行执行相似性比较步骤。
技术研发人员:郑川江,文述生,郝志刚,黄海锋,闫志愿
受保护的技术使用者:广州南方卫星导航仪器有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!