一种基于立体测绘的阻水构筑物识别方法与流程
本技术涉及一种识别方法,尤其涉及一种基于立体测绘的阻水构筑物识别方法,属于阻水构筑物识别。
背景技术:
1、近年来河湖管理很重要,常态化开展河湖“清四乱”专项整治行动,对以各种名义侵占河道、围垦湖泊、非法采砂、乱堆垃圾、乱建妨碍行洪建筑物等“四乱”突出问题全面执行河湖监管。
2、当前“清四乱”工作主要采用遥感影像监测配合车辆巡逻的方式,面临着在正射影像上难识别围堤、采砂场、垃圾堆,现场巡逻范围有限、证据收集困难等问题,急需新的科学技术和监管手段进行河湖监测和管理。
技术实现思路
1、在下文中给出了关于本发明的简要概述,以便提供关于本发明的某些方面的基本理解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
2、鉴于此,为解决现有技术中存在的正射影像上难识别围堤、采砂场、垃圾堆,现场巡逻范围有限、证据收集困难的技术问题,本发明提供一种基于立体测绘的阻水构筑物识别方法。
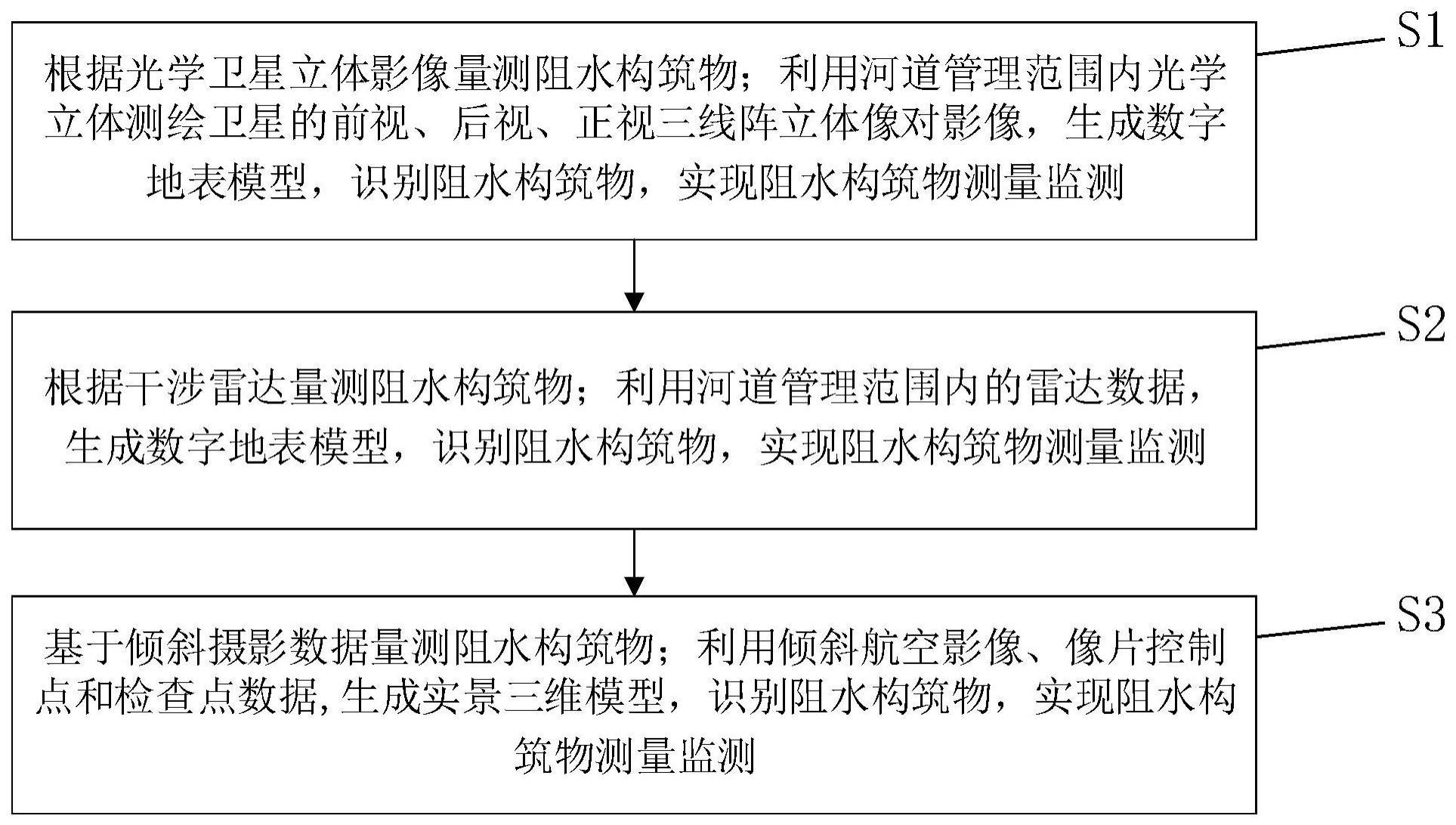
3、方案一:一种基于立体测绘的阻水构筑物识别方法,根据光学卫星立体影像、干涉雷达和倾斜摄影获取数据,基于地理场景生产方式,进行数据协同,建立地形与纹理一体化的三维模型,实现河湖三维场景下阻水构筑物的可视化、定量化监测;具体包括以下步骤:
4、s1.根据光学卫星立体影像量测阻水构筑物;利用河道管理范围内光学立体测绘卫星的前视、后视、正视三线阵立体像对影像,生成数字地表模型,识别阻水构筑物,实现阻水构筑物测量监测;
5、s2.根据干涉雷达量测阻水构筑物;利用河道管理范围内的雷达数据,生成数字地表模型,识别阻水构筑物,实现阻水构筑物测量监测;
6、s3.基于倾斜摄影数据量测阻水构筑物;利用倾斜航空影像、像片控制点和检查点数据,生成实景三维模型,识别阻水构筑物,实现阻水构筑物测量监测。
7、优选的,s1具体方法是:
8、s11.立体模型构建:创建河道管理范围区工程文件,导入区域网平差成果,恢复立体模型;
9、s12.空中三角解算:从rpc文件中获得卫星扫描坐标系与像片坐标系间的变换关系及两景影像的相对位置关系,结合地面控制点或内业加密点对应的像点坐标、卫星影像匹配结果及影像的方位元素,构成区域网进行空中三角解算,得到卫星影像的精确外方位元素,将影像纳入大地坐标系;
10、s13.水平核线影像生成:基于核线几何关系,确定立体像对的同名核线,生成沿核线方向排列的数字影像,消除影像对在垂直方向上的上下视差,经重采样形成规则格网核线影像;
11、s14.影像匹配:采集特征点、特征线、特征面要素,以特征要素作为约束,利用协方差函数方法识别两幅影像之间的同名点,完成影像匹配,协方差函数公式如下:
12、r(p,q)=∫∫(x,y)∈dg(x,y)g(x+p,y+q)dxdy
13、若满足r(p0,q0)>r(p,q)(p≠p0,q≠q0)条件,则p0,q0为搜索区影像相对于目标影像的位移参数;
14、s15.基于影像匹配获取的同名点数据,利用后方交会法和移动曲面拟合处理生成数字地表模型,根据数字地表模型数据模拟地形三维场景,实现阻水构筑物测量监测。
15、优选的,s2具体方法是:
16、s21.进行干涉配准处理:对sar影像进行图像配准;
17、s22.进行干涉处理:对主辅影像的复数值进行重采样,并将主影像与配准采样后的辅影像进行共轭相乘,计算得到干涉图:
18、
19、δr=bcos(θ-θb)
20、其中,λ为波长;f为雷达传播速度,即光速;b为两天线间基线距;θ为入射角;θb为天线基线与飞行水平面法线间的夹角;
21、s23.进行多视处理:对slc数据方位向和/或距离计算平均值,得到多视后的强度数据;
22、s24.进行滤波处理:使用lee滤波消除由于信号的衰落引起的斑点和条纹噪声;
23、s25.进行相位解缠处理:对去平和滤波后的位相进行相位解缠,公式如下:
24、
25、其中,是解缠后的相位,n是条纹数目且为实数,n是条纹级次,是n的整数部分;
26、s26.进行相位转高程处理:进行轨道精炼和相位偏移的计算,消除斜坡相位,对卫星轨道和相位偏移进行纠正,再对解缠后的相位转化为高程或形变值;
27、s27.进行地理编码处理:将sar数据从斜距坐标系转到地理坐标系,通过地理编码生成数字地表模型。
28、优选的,s3具体方法是:
29、s31.采集倾斜摄影数据、控制点和检测点;
30、s32.检查s31所述倾斜摄影数据和控制点,当倾斜摄影数据满足地面分辨率不大于5厘米时,斜摄影数据合格;控制点数据布设均匀、控制点测量精度满足平面精度不大于5厘米,高程精度不大于10厘米时,控制点数据合格,执行s33,如不满足上述条件,则数据不合格,返回s31;
31、s33.对s31所述倾斜摄影数据、控制点和检测点进行空三计算;
32、s34.检查进行空三计算后的倾斜摄影数据、控制点和检测点;若三维模型平面精度不大于20厘米和高程精度不大于30厘米,则数据合格,执行s35,否则数据不合格,返回s33;
33、s35.生成三维模型,并检查三维模型是否合格。
34、优选的,s31具体方法是:
35、s311.采集倾斜摄影数据;无人机外业航摄,基于测区内1:1万地形图、1:5万地形,确定测区内及周边有无高大密集建筑物、10公里内无军用、民用飞机场和大型设施影响飞行安全的因素,按照无人机航摄相关标准,开展实地踏勘;
36、s312.进行航空拍摄,对航空拍摄数据进行质量检查,数据质量满足航摄数据地面分辨率不大于5厘米、航向重叠度不小于80%、旁向重叠度不小于75%、航向超出摄区边界线不少于10条基线、旁向超出摄区边界线不少于3条航线,若质量不合格执行s311,若质量合格执行s313;
37、s313.根据航空拍摄数据进行内业成果整理和编制,形成倾斜摄影数据;
38、s314.控制点和检测点布设,以测区四角加中心为布设基础,平均分布于测区,控制点每平方公里不少于5个,检查点不少于2个;按照不规则区域网布点,利用已有遥感影像资料进行像控点的布设,通过测区内已有的hljcors进行像片控点的测量;
39、s315.对像片控制点的测量数据进行整理和检查,控制点与检查点布设需满足s314,测量精度满应足平面精度不大于5厘米,高程精度不大于10厘米,如质量不合格执行s314-s315。
40、优选的,s35具体方法是:
41、s351.对s33所述倾斜摄影数据、控制点和检测点进行自由网平差;
42、s352.检查数据是否合格,数据质量满足自由网平差连接点匹配正确率不低于80%,若数据合格执行s353,若数据不合格执行s351;
43、s353.导入像控点;
44、s354.进行空三控制网绝对定向;
45、s355.检查数据是否合格,数据质量满足像控点残差平面精度不大于20厘米、高程精度不大于30厘米,若数据合格执行s356,若数据不合格执行s354;
46、s356.自动化三维模型构建。
47、优选的,s36检查三维模型具体包括:
48、1)数学精度检查:模型平面与高程精度是否满足项目要求;
49、2)模型完整性检查:除航摄死角外,是否完整还原测区地面全要素信息,测区范围内是否出现漏洞、贴图模糊错误;检查实景三维中建筑边缘是否整齐,是否出现漏洞、是否符合实际地物特征;
50、3)纹理质量检查:模型纹理是否出现偏色、曝光和除阴影外的色斑;纹理位置是否出现偏移、变形与实地不相符;
51、4)场景效果检查:目视检查实景三维数据的场景效果是否真实;
52、5)检查实景三维模型数据的完整性、现势性、逻辑一致性、几何精度。
53、本发明的有益效果如下:本发明以光学卫星立体影像数据、干涉雷达数据和倾斜摄影数据为数据源,基于地理场景生产方式,实现不同分辨率的多类型数据协同应用,建立地形与纹理一体化表达的真三维模型,实现河湖三维场景下阻水构筑物的可视化、定量化监测。并且,利用立体测绘技术解译民堤、围堤较传统基于平面dom解译具有很大优势,能够更直观辨识堤防,且三维数据具有可量测性,可以量测堤的高度信息。应用卫星遥感数据、雷达数据、无人机环境监测数据,建立了“天空地”一体化河道阻水构筑物的监测体系,可为下一步大区域、全天时、全天候、动态、立体监测体系的建立奠定基础,提供技术保障。解决了现有技术中存在的正射影像上难识别围堤、采砂场、垃圾堆,现场巡逻范围有限、证据收集困难的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!