一种空间目标超短弧初始轨道智能确定方法
本发明涉及一种空间目标超短弧初始轨道智能确定方法,属于航空航天。
背景技术:
1、随着航天技术的不断发展,空间态势感知已成为世界各国关注的焦点。空间目标轨道确定正成为涉及空间领域的一个研究热点,尤其近地非合作目标和深空有限视场内高动态目标等空间目标正面临迫切的感知需求。在空间目标轨道确定领域中,一个重要的问题就是空间目标初始轨道确定问题。空间目标初始轨道确定问题是一个典型的轨道动力学问题,一般采用仅考虑j2项影响的二体模型或多项式拟合方法,通过观测数据确定空间目标的初始轨道。按照改进思想,初始轨道确定和精密轨道确定这两类问题共同构成空间目标轨道确定问题。初始轨道确定是精密轨道确定的先决条件,其准确程度直接决定精密轨道确定计算的收敛与否和收敛速度。过短的观测弧段将使空间目标初始轨道确定难度大幅增加,但利用较少观测数据尽早确定目标轨道参数对空间态势感知任务尤为关键。因此,研究空间目标超短弧初始轨道确定问题是十分必要的。
2、在已发展的关于空间目标超短弧初始轨道智能确定方法中,在线技术[1](参见:ansalone l,curti f.a genetic algorithm for initial orbit determination from atoo short arc optical observation[j].advances in space research,2013,52(3):477-489.)考虑将遗传算法引入到初轨解算中,提出了一种利用短时间观测光学数据的初始轨道确定方法,选取了首尾时刻的斜距作为优选变量,从而反算出轨道根数解,该方法新颖且解算精度高,但算法几何解释性差。
3、在先技术[2](参见:张郑元,桑吉章,陈俊宇.神经网络在甚短弧初轨确定问题中的应用[j/ol].测绘地理信息:1-5[2022-10-05].)考虑根据单弧段有限观测信息得到一组粗略轨道根数的甚短弧初轨确定问题,应用神经网络算法的“万能近似性质”设计了求解一组角度观测值和对应真实轨道根数解之间精确数学方程的神经网络算法,提升了传统初轨确定解算精度,但仍需给定已用某种方法解算甚短弧观测数据获得的一组粗略轨道根数,即仅用于轨道根数解算精度改进,且容易出现不收敛的问题,鲁棒性较差。
4、随着人工智能技术的不断发展,循环神经网络被提出并用于处理时序问题,但当神经网络的节点经过许多阶段的计算后,之前较长时间片的特征将被覆盖。长短期记忆神经网络可以解决这一普遍存在的长期依赖问题,更充分有效地利用较长的历史信息。
技术实现思路
1、本发明公开的一种空间目标超短弧初始轨道智能确定方法要解决的技术问题是:基于超短弧观测数据,利用神经网络的快速预测性能和长短期记忆网络的较长历史信息利用能力,学习观测数据和轨道参数之间的复杂非线性关系,实现空间目标超短弧初始轨道的智能确定,具有覆盖范围广、鲁棒性强且可靠性高、求解效率高、灵活性强且拓展性高等优点。
2、本发明的目的是通过下述技术方案实现的:
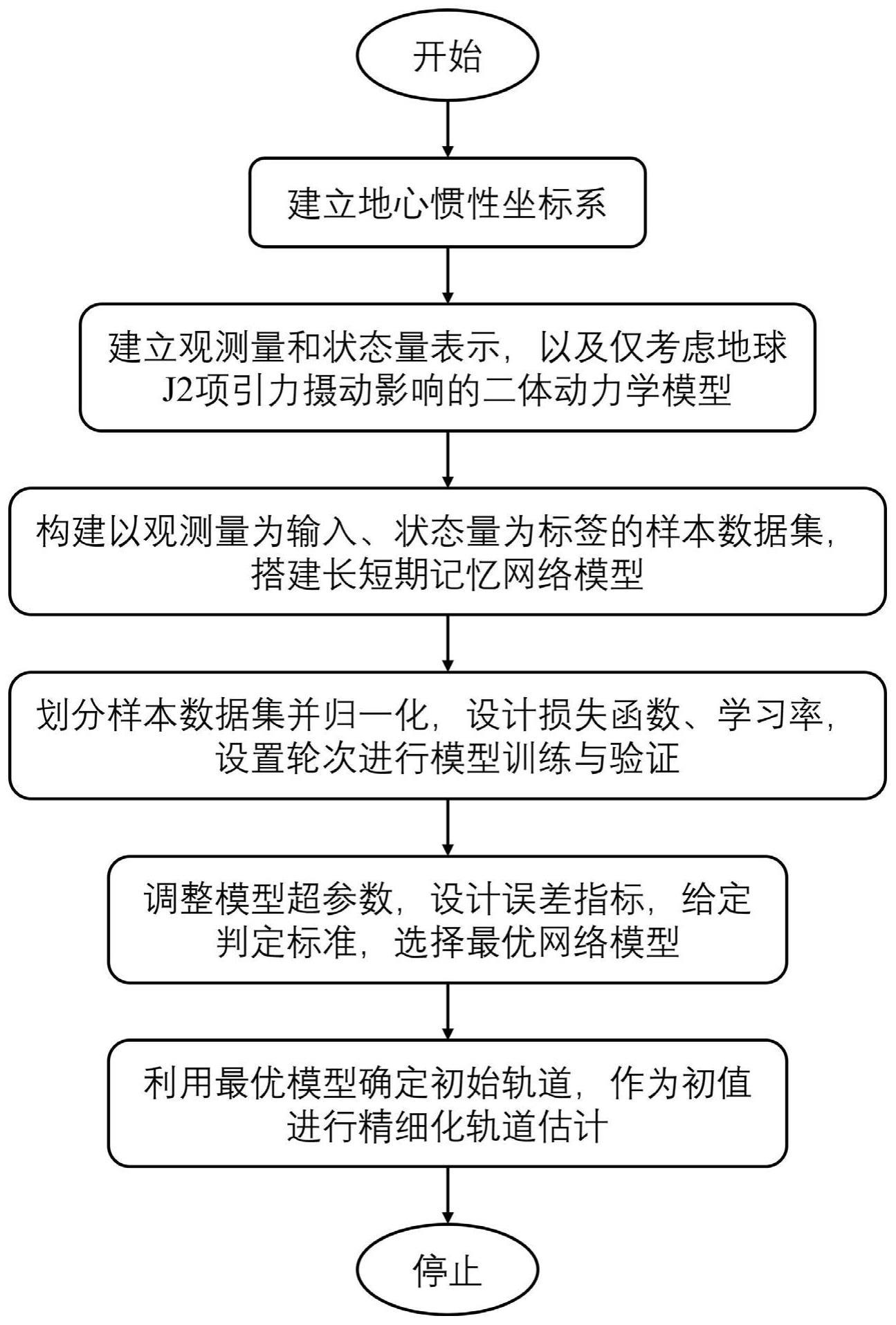
3、本发明公开的一种空间目标超短弧初始轨道智能确定方法,建立地心惯性坐标系,在此基础上建立观测量、状态量表示和仅考虑j2项影响的二体动力学模型;随机生成多组目标轨道,构建以观测量为输入、状态量为标签的样本数据集,并搭建长短期记忆网络模型,设计观测量嵌入层、状态量嵌入层、状态量解码层;按照预定比例划分样本数据集并进行数据归一化处理,基于状态量输出设计以均方差表示的损失函数和动态下降的学习率,设置预定轮次进行网络模型训练与验证;根据损失调整超参数,设计误差指标,综合损失函数与误差指标,选择用于空间目标超短弧初始轨道智能确定的最优长短期记忆网络模型。本发明能够基于大量空间目标超短弧观测数据样本,训练长短期记忆网络模型学习观测数据和轨道参数之间的复杂非线性关系,获得最优网络模型以可靠且快速地预测空间目标初始轨道,并将预测结果作为初值用于精密轨道确定。本发明能够用于目标选择、目标抵近规划制导控制等多个任务场景,有利于提高任务效率与效果。
4、本发明公开的一种空间目标超短弧初始轨道智能确定方法,包括如下步骤:
5、步骤一:建立用于空间目标超短弧初始轨道确定的地心惯性坐标系。
6、选择地球的中心作为坐标原点o来建立地心惯性坐标系。x轴指向春分点,z轴沿地球旋转轴并指向北极。y轴与x和z两轴构成右手直角坐标系,即实现用于空间目标超短弧初始轨道确定的地心惯性坐标系的建立。
7、步骤二:在地心惯性坐标系下建立空间目标超短弧初始轨道确定的观测量和状态量表示,所述观测量考虑由笛卡尔位置坐标转换为球坐标的地面测站方位角、空间目标视线角及其变化率,所述状态量考虑空间目标相对地面测站的相对距离模长和相对速度模长。二体动力学模型相较于多体动力学模型所需参数更少但仍能反映空间目标动力学状态,且二体动力学模型主要摄动参数为对空间目标动力学影响最大的地球j2项引力摄动,即建立仅考虑地球j2项引力摄动影响的空间目标二体动力学模型。
8、步骤2.1:在地心惯性坐标系下建立空间目标超短弧初始轨道确定的观测量和状态量表示,所述观测量考虑由笛卡尔位置坐标转换为球坐标的地面测站方位角、空间目标视线角及其变化率,所述状态量考虑空间目标相对地面测站的相对距离模长和相对速度模长。
9、在地心惯性坐标系下地面测站对空间目标的7×1维观测量表示为:
10、
11、其中,表示地面测站所处位置从地心惯性坐标系x轴测量的xy平面上的逆时针方位角,和分别表示空间目标相对地面测站在地心惯性坐标系下的视线角及其变化率。其中,rt=[xt yt zt]t和rs=[xs ys zs]t分别表示空间目标和地面测站在地心惯性坐标系中的位置坐标,而△r=rt-rs和△r=||△r||分别表示空间目标相对地面测站的相对位置向量及其模长,i3×3为3×3维的单位矩阵,下标t代表空间目标,下标s代表地面测站。
12、在地心惯性坐标系下地面测站观测空间目标的2×1维状态量表示为:
13、
14、其中,△v=||△v||=||vt-vs||表示空间目标相对地面测站的相对速度向量模长,vt=[vxt vyt vzt]t和vs=[vxs vys vzs]t分别表示空间目标和地面测站在地心惯性坐标系中的速度坐标。
15、步骤2.2:二体动力学模型相较于多体动力学模型所需参数更少但仍能反映空间目标动力学状态,且二体动力学模型主要摄动参数为对空间目标动力学影响最大的地球j2项引力摄动,即建立仅考虑地球j2项引力摄动影响的空间目标二体动力学模型。
16、仅考虑地球j2项引力摄动影响,空间目标的二体动力学模型表示为:
17、
18、其中,drt和dvt分别表示空间目标在地心惯性坐标系下的位置向量变化率和速度向量变化率,下标e代表地球,μe表示地球引力常数,rt=||rt||表示空间目标位置向量模长,表示与空间目标位置向量相关的地球j2项引力摄动。其中,j2为地球j2项引力摄动系数,re为地球平均半径。
19、步骤三:结合拉丁超立方采样和给定的一组空间目标轨道根数区间上下界,生成多组目标轨道根数;利用步骤二中建立的仅考虑j2项影响的二体动力学模型,通过动力学积分获得轨道演化;计算每组采样轨道各可见弧段以步骤2.1表示的观测量与状态量,并据此不断更新两者区间上下界;以观测量为输入,以状态量为标签,并引入两者区间上下界,构建用于空间目标超短弧初始轨道智能确定的样本数据集。考虑以步骤二表示的观测量和状态量分别为输入和输出,搭建用于空间目标超短弧初始轨道智能确定的长短期记忆网络模型;结合多层感知机模型以及线性函数和非线性激励函数,设计观测量嵌入层,提取7维观测量输入的特征;设计状态量嵌入层,提取s维状态量输入的特征;设计状态量解码层,提取状态量嵌入层输出作为输入的特征,并获得2维状态量输出。
20、步骤3.1:结合拉丁超立方采样和给定的一组空间目标轨道根数区间上下界,生成多组目标轨道根数;利用步骤2.2中建立的仅考虑j2项影响的二体动力学模型,通过动力学积分获得轨道演化;计算每组采样轨道各可见弧段以步骤2.1表示的观测量与状态量,并据此不断更新两者区间上下界;以观测量为输入,以状态量为标签,并引入两者区间上下界,构建用于空间目标超短弧初始轨道智能确定的样本数据集。
21、空间目标轨道根数共6维,包括半长轴a、偏心率e、倾角i、升交点赤经ω、近地点幅角ω、真近点角θ。采用服从均匀分布的拉丁超立方采样方法,将0-1样本空间等分为n层,使每层样本维度为6维,且每个维度中的元素随机排列。在采样基础上,进一步给定空间目标的轨道根数上界eu=[au eu iuωuωuθu]和轨道根数下界el=[al el ilωlωlθl],生成的满足界限的n组空间目标轨道根数表示为:
22、e=es·(eu-el)+el (4)
23、其中,es表示n×6维的拉丁超立方采样结果,符号“·”表示点乘。
24、利用式(3)中仅考虑地球j2项引力摄动影响的空间目标二体动力学模型,以轨道根数在地心惯性坐标系下的位置向量r0和速度向量v0为积分初值,设定积分区间[t0,tf]和积分步长dt,通过积分获得多组空间目标位置向量和速度向量的轨道状态演化。计算并记录空间目标每组采样轨道的可见弧段,并求解各组采样轨道中各可见弧段的观测量与状态量。给定一组观测量区间上下界初值ou0、ol0和状态量区间上下界初值su0、sl0,比较每次求解结果并不断更新,获得观测量区间上下界ou和ol,以及状态量区间上下界su和sl。
25、为实现空间目标超短弧初始轨道智能确定,考虑以观测量为输入,以状态量为标签,并引入两者区间上下界,构建样本数据集。
26、步骤3.2:考虑以步骤2.1表示的观测量和状态量分别为输入和输出,搭建用于空间目标超短弧初始轨道智能确定的长短期记忆网络模型;结合多层感知机模型以及线性函数和非线性激励函数,设计观测量嵌入层,提取7维观测量输入的特征;设计状态量嵌入层,提取s维状态量输入的特征;设计状态量解码层,提取状态量嵌入层输出作为输入的特征,并获得2维状态量输出。
27、设定空间目标超短弧初始轨道智能确定的长短期记忆网络模型的输入特征维度为7维,隐藏层状态维度为h维,网络堆叠层数为l层,批处理维度为b维。
28、为表征和提取7维观测量特征信息,利用多层交替的线性函数和非线性激励函数,设计观测量嵌入层。第一层的线性函数将7维观测量输入扩展为ko维,中间层的多个线性函数进行多次特征处理,最后一层的线性函数将特征最终映射为do维。每两层线性函数之间使用激活函数,通过引入非线性因素,使得神经网络可以任意逼近任何非线性函数。选用leakyrelu函数作为观测量嵌入层的非线性激励函数,表示为:
29、
30、其中,λ为很小的正常数。从而减少后续网络训练时梯度消失与梯度爆炸的可能,具有计算复杂度低、收敛速度快等优点,且相对于relu函数在负数区域更偏向激活而不是神经元坏死。
31、为获得最终的2维状态量,设计与观测量嵌入层结构相似的状态量嵌入层和状态量解码层。同样利用多层交替的线性函数和式(5)的leakyrelu非线性激励函数,状态量嵌入层将s维状态量映射为ds维;状态量解码层将状态量嵌入层输出的ds维特征作为输入,并通过多次处理后映射为2维状态量。
32、长短期记忆网络以隐藏层状态h(t)和神经元状态c(t)表示记录之前状态的变量,并随着新输入x(t)改变。隐藏层状态h(t)记录更近的信息,变化速度较快;神经元状态c(t)则记录更远的信息,变化速度较慢。为求解空间目标超短弧初始轨道确定问题,设网络初始隐藏层状态h0的维度为网络堆叠层数×批处理维度×隐藏层状态维度,即(l×b×h)维;初始神经元状态c0则为与初始隐藏层状态h0同维的零张量。
33、步骤四:按照预定比例,将用于空间目标超短弧初始轨道智能确定的样本数据集划分为训练集与验证集;为便于数据处理,加快求解速度并提高精度,利用步骤3.1中更新的观测量与状态量两者区间上下界,分别归一化训练集和测试集中的观测量与状态量。关注状态量输出,设计以均方差表示的损失函数;考虑过高或过低的恒定学习率在训练后期可能导致损失函数发散或收敛缓慢的问题,基于指数函数设计不断降低的学习率;设置一定数量的轮次,通过前向传播、损失计算、梯度清零、反向传播、参数更新,训练搭建的长短期记忆网络模型,并在不计算梯度和更新参数的情况下进行验证;学习观测量和状态量之间的非线性关系,从而利用超短弧观测量和模型参数更新来确定空间目标初始轨道。
34、步骤4.1:按照一定比例,将用于空间目标超短弧初始轨道智能确定的样本数据集划分为训练集与验证集,0.8:0.2可作为优选;为便于数据处理,加快求解速度并提高精度,利用步骤3.1中更新的观测量与状态量两者区间上下界,分别归一化训练集和测试集中的观测量与状态量。
35、为选择最优长短期记忆网络模型以实现空间目标超短弧初始轨道智能确定,按照一定比例将样本数据集划分为训练集与验证集。训练集用于训练网络模型并确定模型权重,验证集用于评估网络模型并确定模型结构以及调整模型超参数。0.8:0.2可作为划分比例优选。
36、由于空间目标超短弧轨道确定的观测量与状态量具有不同的量纲和数量级,考虑让不同维度之间的特征在数值上可比较、可加权,对训练集和测试集的数据进行归一化处理,保证结果的可靠性,有利于加快最优解求解速度并提高精度。利用观测量和状态量两者区间上下界,使用min-max归一化方法对样本数据集中的原始观测量和状态量数据进行线性变换,使结果落到[0,1]区间。归一化后的观测量与状态量分别表示为:
37、
38、其中,下标n代表归一化。
39、步骤4.2:关注状态量输出,设计以均方差表示的损失函数;考虑过高或过低的恒定学习率在训练后期可能导致损失函数发散或收敛缓慢的问题,基于指数函数设计不断降低的学习率;设置一定数量的轮次,通过前向传播、损失计算、梯度清零、反向传播、参数更新,训练步骤3.2搭建的长短期记忆网络模型,并在不计算梯度和更新参数的情况下进行验证;学习观测量和状态量之间的非线性关系,从而利用超短弧观测量和模型参数更新来确定空间目标初始轨道。
40、考虑空间目标超短弧初始轨道智能确定问题中关注的状态量输出,以状态量预测值和状态量真实值s之间的均方差为线索,通过最小化这一指标寻找最优权重参数,具有便于梯度下降法且收敛速度快的优点。设计长短期记忆网络模型的损失函数,表示为:
41、
42、其中,n表示样本个数,li表示第i个样本的损失值。
43、由于过高的恒定学习率在训练后期可能导致损失函数发散的问题,而过低的恒定学习率又将导致损失函数收敛缓慢的问题,设计逐渐降低的学习率,使得用于空间目标超短弧初始轨道智能确定的损失函数稳定收敛。选用指数函数实现学习率衰减,即先使用较大学习率快速获得较优解,再随着训练轮次的迭代逐步减小学习率,使网络模型在训练后期更加稳定。基于指数函数不断更新的学习率表示为:
44、lr=lr0×γepoch (8)
45、其中,lr0表示初始学习率,γ表示[0,1]区间的指数衰减率,epoch表示训练轮次。
46、设置一定数量的轮次上限ne,训练和验证用于空间目标超短弧初始轨道智能确定的长短期记忆网络模型。在每个轮次中,利用训练集数据,首先进行前向传播,通过向网络模型传入观测量输入预测状态量输出;其次根据状态量预测值与状态量真实值,计算损失函数;之后将梯度初始化为0,清零过往梯度;然后将损失值向输入侧进行反向传播,计算当前梯度;最后根据梯度,更新所有网络模型参数。利用验证集数据,前向传播并计算损失函数,但不进行反向传播计算梯度,因此不更改训练后的网络模型参数,仅用于评估训练效果。通过训练网络模型,学习观测量输入和状态量输出之间的非线性关系,从而利用超短弧观测量和模型参数更新来确定空间目标初始轨道。
47、步骤五:根据训练损失和验证损失,调整搭建的长短期记忆网络模型结构以及设置的动态变化学习率、训练轮次等超参数,检验模型收敛情况并避免出现欠拟合或过拟合现象;并以状态量估计值与真实值之差为误差指标,对每个轮次中整个验证集的所有误差进行均值与标准差统计;选取训练损失不断下降过程中验证损失最小的轮次,若相应轮次的误差统计值低于给定阈值,则将该轮次的网络模型作为用于空间目标超短弧初始轨道智能确定的最优长短期记忆网络模型。
48、根据每个轮次计算的训练损失函数和验证损失函数随轮次的变化,调整用于空间超短弧初始轨道智能确定的长短期记忆网络模型,包括隐藏层状态维度、批处理维度,观测量嵌入层、状态量嵌入层和状态量解码层的结构;并调整设置的动态变化学习率、训练轮次等超参数。使得网络模型的损失函数快速稳定收敛,且避免出现欠拟合或过拟合现象。
49、为评估长短期记忆网络对空间目标超短弧初始轨道确定的效果,以验证过程中的状态量预测值与状态量真实值之差为误差指标,表示为:
50、
51、根据每个轮次中整个验证集的所有误差,进行均值与标准差统计。误差的均值errormean越小,说明空间目标超短弧观测条件下的初始轨道预测结果越接近真实结果,整体预测效果越好;误差的标准差errorstd越小,说明对应不同观测量的空间目标超短弧初始轨道预测结果与真实结果的离散程度越小,预测分布越集中。下标mean和std分别代表均值和标准差。
52、综合利用损失函数和误差指标,选择最优长短期记忆网络模型,以实现空间目标超短弧初始轨道智能确定。在训练损失不断下降的过程中,寻找非欠拟合或过拟合的验证损失最小的轮次,最优模型的判定标准表示为:
53、
54、其中,thmean和thstd分别表示误差均值阈值与误差标准差阈值。当且仅当判定标准的两项不等式均成立时,该轮次的网络模型被选为用于空间目标超短弧初始轨道智能确定的最优长短期记忆网络模型。
55、还包括步骤六,利用步骤五中获得的最优长短期记忆网络模型,确定超短弧空间目标初始轨道,并将其作为初值进行精细化轨道估计,进而快速得到高精度空间目标轨道状态,提升轨道预报精度,有利于为后续的目标选择、目标抵近规划制导控制提供基础信息并提高效率与效果。
56、有益效果:
57、1、本发明公开的一种空间目标超短弧初始轨道智能确定方法,基于人工智能技术实现空间目标超短弧初始轨道确定,对复杂非线性问题没有严苛的要求,不仅能够完成考虑二体运行规律的空间目标超短弧初始轨道确定问题的求解,并且能够发展更复杂摄动情况和多体运行规律下的初始轨道确定,覆盖范围更广。
58、2、本发明公开的一种空间目标超短弧初始轨道智能确定方法,随机生成多组目标轨道并计算各可见弧段的观测量与状态量,构建超大容量的样本数据集,有助于神经网络利用丰富的样本学习观测量与状态量之间的非线性关系,并产生良好的预测效果,鲁棒性强且可靠性高。
59、3、本发明公开的一种空间目标超短弧初始轨道智能确定方法,搭建并训练长短期记忆网络模型,通过设计和调整超参数确定最优网络模型权重参数,可以根据观测获得未知空间目标超短弧初始轨道的快速预测解,能够解决收敛性难题,相比于传统初始轨道求解方法,求解效率更高。
60、4、本发明公开的一种空间目标超短弧初始轨道智能确定方法,通过考虑不同输入和输出,能够满足更多空间目标超短弧初始轨道确定任务场景,以预测解为初值还能够进一步实现精密轨道确定,适用于后续多种任务场景,灵活性强且拓展性高。
- 还没有人留言评论。精彩留言会获得点赞!