道路边界的识别方法及装置、存储介质、终端与流程
本发明涉及一种自动驾驶,特别是涉及一种道路边界的识别方法及装置、存储介质、终端。
背景技术:
1、在自动驾驶车辆的运行过程中,需要识别车辆周围的障碍物,以划分行驶区域。对城市中行驶的乘用车,障碍物的特征也比较明显,但对于矿区的宽体车,由于行驶的环境比较复杂,且在装料和卸料泊车的时候,需要对后方较大范围内的挡墙进行精准识别,才能够避免渣土缷倒至挡墙内侧,或车辆与挡墙发生碰撞的问题,因此,矿区宽体车对道路边界识别的精准度有着更高的要求。
2、现有的道路边界识别方法,以栅格为提取道路边界点云的最小单元,使道路边界的提取受限于栅格的尺寸及点云在栅格中的分布情况,导致道路边界的识别精度较低,同时,在进行梯度计算时,使用体素滤波进行降采样,这使得最终的计算结果仅能体现平均值,当挡墙的梯度不明显或栅格内的点云线束较少时,易发生挡墙漏识别,进一步降低道路边界的识别精度。
技术实现思路
1、有鉴于此,本发明提供一种道路边界的识别方法及装置、存储介质、终端,主要目的在于解决后向道路边界的识别精度较低的问题。
2、依据本发明一个方面,提供了一种道路边界的识别方法,包括:
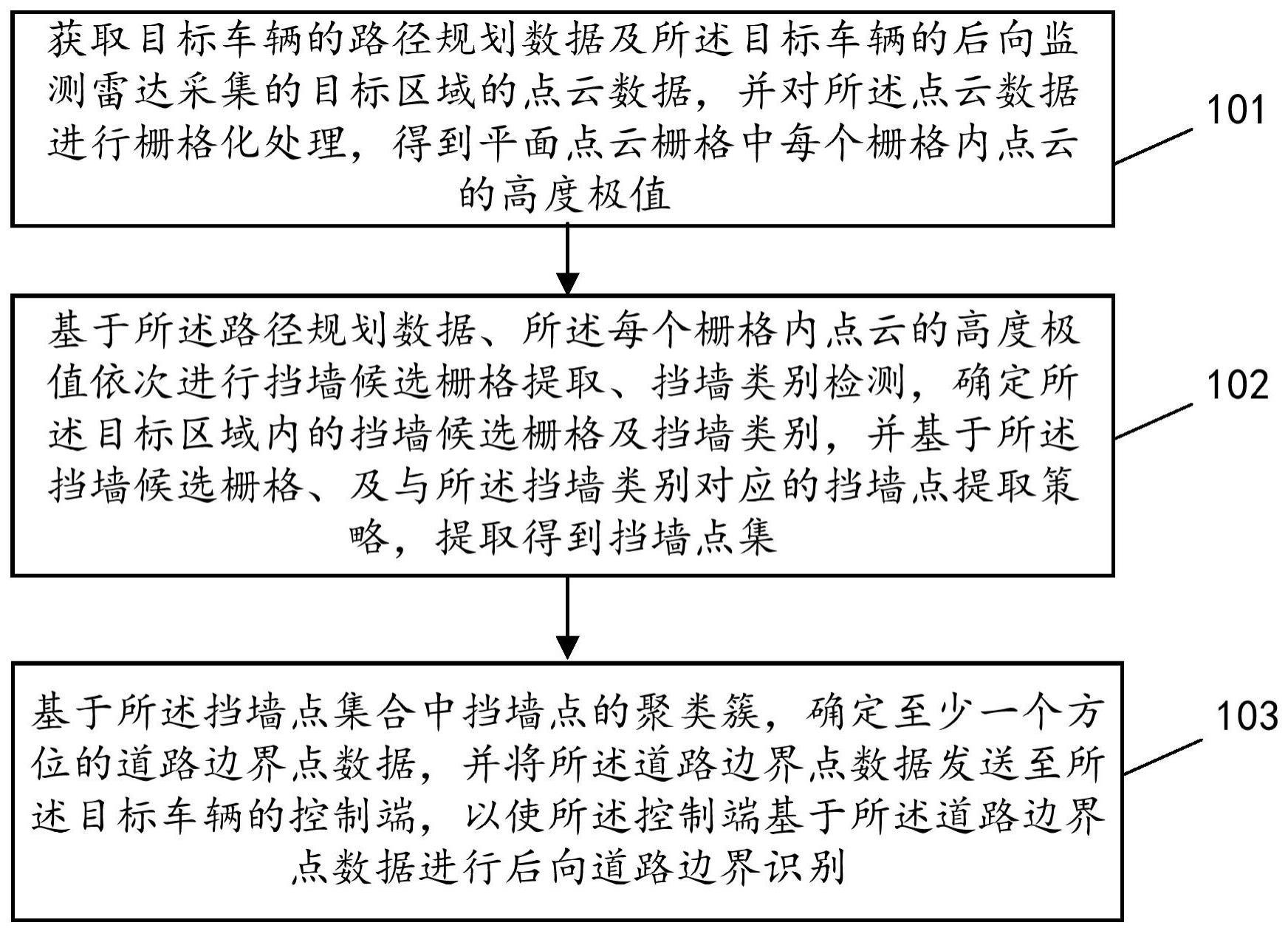
3、获取目标车辆的路径规划数据及所述目标车辆的后向监测雷达采集的目标区域的点云数据,并对所述点云数据进行栅格化处理,得到平面点云栅格中每个栅格内点云的高度极值;
4、基于所述路径规划数据、所述每个栅格内点云的高度极值依次进行挡墙候选栅格提取、挡墙类别检测,确定所述目标区域内的挡墙候选栅格及挡墙类别,并基于所述挡墙候选栅格、及与所述挡墙类别对应的挡墙点提取策略,提取得到挡墙点集合;
5、基于所述挡墙点集合中挡墙点的聚类簇,确定至少一个方位的道路边界点数据,并将所述道路边界点数据发送至所述目标车辆的控制端,以使所述控制端基于所述道路边界点数据进行后向道路边界识别。
6、进一步地,所述基于所述候选栅格、及与所述挡墙类别对应的挡墙点提取策略,提取得到挡墙点集合包括:
7、通过对所述候选栅格的第一参照点云进行平面拟合得到第一参照点云平面,并计算所述第一参照点云平面的法向量与所述目标车辆的车底平面之间的第一夹角;
8、基于所述第一夹角与预设夹角阈值的比对结果,从所述候选栅格中确定出挡墙栅格,所述预设夹角阈值为基于所述挡墙类别确定的;
9、通过对所述挡墙栅格中每个扫描点的第二参照点云进行平面拟合得到第二参照点云平面,并计算所述第二参照点云平面的法向量与所述目标车辆的车底平面之间的第二夹角;
10、基于所述第二夹角与所述预设夹角阈值的比对结果,确定出所述挡墙栅格中的挡墙点,并基于全部所述挡墙栅格中的挡墙点构建得到挡墙点集合。
11、进一步地,所述通过对所述候选栅格的第一参照点云进行平面拟合得到第一参照点云平面之前,所述方法还包括:
12、计算得到所述候选栅格中点云的质心点,并以所述质心点为圆心、第一关联点云划分参数为半径进行关联点云划分,得到第一关联点云;
13、计算所述第一关联点云中每个扫描点与所述质心点的第一高度差值,并基于所述第一高度差值与第一预设高度差值阈值的比对结果从所述第一关联点云中提取得到第一参照点云;
14、所述通过对所述挡墙栅格中每个扫描点的第二参照点云进行平面拟合得到第二参照点云平面之前,所述方法还包括:
15、以所述挡墙栅格中每个目标扫描点为圆心、第二关联点云划分参数为半径进行关联点云划分,得到第二关联点云;
16、计算所述第二关联点云中每个扫描点与所述目标扫描点的第二高度差值,并基于所述第二高度差值与第二预设高度差值阈值的比对结果从所述第二关联点云中提取得到第二参照点云。
17、进一步地,所述挡墙类别包括山体挡墙、非山体挡墙,所述基于所述第一夹角与预设夹角阈值的比对结果,从所述候选栅格中确定出挡墙栅格包括:
18、若所述挡墙类别为山体挡墙,则基于所述第一夹角与第一预设夹角阈值的比对结果确定挡墙栅格;
19、若所述挡墙类别为非山体挡墙,则基于所述第一夹角与所述第二预设夹角阈值、第三预设夹角阈值的比对结果确定挡墙栅格。
20、进一步地,所述高度极值包括高度最大值、高度最小值,所述对所述点云数据进行栅格化处理,得到每个栅格内点云的高度极值包括:
21、基于预设平面栅格的栅格尺寸参数,计算所述点云数据中每个扫描点在所述预设平面栅格中的栅格坐标,所述预设平面栅格中每个栅格配置有原子锁;
22、为所述点云数据中的不同点云分配对应的线程,并基于所述线程将所述不同点云中的扫描点并行写入与所述扫描点的栅格坐标相匹配的栅格中,得到所述点云数据的点云栅格;
23、基于所述点云栅格中每个栅格中全部扫描点的高度值,确定每个栅格中的高度最大值、高度最小值,所述高度值为所述扫描点在所述预设平面栅格的法线方向上的高度。
24、进一步地,所述基于所述路径规划数据、所述每个栅格内点云的高度极值依次进行挡墙候选栅格提取、挡墙类别检测,确定所述目标区域内挡墙的候选栅格及挡墙类别包括:
25、基于所述每个栅格内点云的高度极值计算得到每个栅格的第一高度差值,若所述第一高度差值小于第三预设高度阈值,则将所述栅格确定为所述目标区域内挡墙的候选栅格,所述第三预设高度阈值为基于目标矿区中的挡墙高度配置的;
26、将所候选栅格作为遍历的头栅格,按照预设遍历参数确定遍历的尾栅格,所述预设遍历参数包括在所述点云栅格中遍历的距离参数、遍历的方向参数;
27、基于所述头栅格的高度极值、所述尾栅格的高度极值,计算得到第二高度差值,若所述第二高度差值大于第四预设高度阈值,则确定所述目标区域内挡墙的挡墙类别为山体挡墙,所述第四预设高度阈值为基于目标矿区中的山体高度配置的。
28、进一步地,所述基于所述挡墙点集合中挡墙点的聚类簇,确定至少一个方位的道路边界点数据包括:
29、基于所述聚类簇在目标车辆坐标系内水平坐标轴向、垂直坐标轴向上的投影值、所述聚类簇中扫描点的水平坐标值,将所述挡墙点集合中的挡墙点划分为至少一个方位的挡墙点,所述目标车辆坐标系为以所述目标车辆的后轴线中心点为中心,车辆右侧为水平坐标轴正向,车头方向为垂直坐标轴正向构建的平面坐标系;
30、针对每个方位的挡墙点,分别计算所述挡墙点的凹包数据,并将所述凹包数据配置为对应方位的道路边界点数据。
31、依据本发明另一个方面,提供了一种道路边界的识别装置,包括:
32、获取模块,用于获取目标车辆的路径规划数据及所述目标车辆的后向监测雷达采集的目标区域的点云数据,并对所述点云数据进行栅格化处理,得到平面点云栅格中每个栅格内点云的高度极值;
33、提取模块,用于基于所述路径规划数据、所述每个栅格内点云的高度极值依次进行挡墙候选栅格提取、挡墙类别检测,确定所述目标区域内的挡墙候选栅格及挡墙类别,并基于所述挡墙候选栅格、及与所述挡墙类别对应的挡墙点提取策略,提取得到挡墙点集合;
34、确定模块,用于基于所述挡墙点集合中挡墙点的聚类簇,确定至少一个方位的道路边界点数据,并将所述道路边界点数据发送至所述目标车辆的控制端,以使所述控制端基于所述道路边界点数据进行后向道路边界识别。
35、进一步地,所述提取模块包括:
36、第一拟合单元,用于通过对所述候选栅格的第一参照点云进行平面拟合得到第一参照点云平面,并计算所述第一参照点云平面的法向量与所述目标车辆的车底平面之间的第一夹角;
37、第一确定单元,用于基于所述第一夹角与预设夹角阈值的比对结果,从所述候选栅格中确定出挡墙栅格,所述预设夹角阈值为基于所述挡墙类别确定的;
38、第二拟合单元,用于通过对所述挡墙栅格中每个扫描点的第二参照点云进行平面拟合得到第二参照点云平面,并计算所述第二参照点云平面的法向量与所述目标车辆的车底平面之间的第二夹角;
39、第二确定单元,用于基于所述第二夹角与所述预设夹角阈值的比对结果,确定出所述挡墙栅格中的挡墙点,并基于全部所述挡墙栅格中的挡墙点构建得到挡墙点集合。
40、进一步地,所述装置还包括:
41、第一划分模块,用于计算得到所述候选栅格中点云的质心点,并以所述质心点为圆心、第一关联点云划分参数为半径进行关联点云划分,得到第一关联点云;
42、第一计算模块,用于计算所述第一关联点云中每个扫描点与所述质心点的第一高度差值,并基于所述第一高度差值与第一预设高度差值阈值的比对结果从所述第一关联点云中提取得到第一参照点云;
43、第二划分模块,用于以所述挡墙栅格中每个目标扫描点为圆心、第二关联点云划分参数为半径进行关联点云划分,得到第二关联点云;
44、第二计算模块,用于计算所述第二关联点云中每个扫描点与所述目标扫描点的第二高度差值,并基于所述第二高度差值与第二预设高度差值阈值的比对结果从所述第二关联点云中提取得到第二参照点云。
45、进一步地,所述确定模块包括:
46、第三确定单元,用于若所述挡墙类别为山体挡墙,则基于所述第一夹角与第一预设夹角阈值的比对结果确定挡墙栅格;
47、第四确定单元,用于若所述挡墙类别为非山体挡墙,则基于所述第一夹角与所述第二预设夹角阈值、第三预设夹角阈值的比对结果确定挡墙栅格。
48、进一步地,所述获取模块包括:
49、第一计算单元,用于基于预设平面栅格的栅格尺寸参数,计算所述点云数据中每个扫描点在所述预设平面栅格中的栅格坐标,所述预设平面栅格中每个栅格配置有原子锁;
50、分配单元,用于为所述点云数据中的不同点云分配对应的线程,并基于所述线程将所述不同点云中的扫描点并行写入与所述扫描点的栅格坐标相匹配的栅格中,得到所述点云数据的点云栅格;
51、第五确定单元,用于基于所述点云栅格中每个栅格中全部扫描点的高度值,确定每个栅格中的高度最大值、高度最小值,所述高度值为所述扫描点在所述预设平面栅格的法线方向上的高度。
52、进一步地,所述确定模块包括:
53、第六确定单元,用于基于所述每个栅格内点云的高度极值计算得到每个栅格的第一高度差值,若所述第一高度差值小于第三预设高度阈值,则将所述栅格确定为所述目标区域内挡墙的候选栅格,所述第三预设高度阈值为基于目标矿区中的挡墙高度配置的;
54、遍历单元,用于将所候选栅格作为遍历的头栅格,按照预设遍历参数确定遍历的尾栅格,所述预设遍历参数包括在所述点云栅格中遍历的距离参数、遍历的方向参数;
55、第二计算单元,用于基于所述头栅格的高度极值、所述尾栅格的高度极值,计算得到第二高度差值,若所述第二高度差值大于第四预设高度阈值,则确定所述目标区域内挡墙的挡墙类别为山体挡墙,所述第四预设高度阈值为基于目标矿区中的山体高度配置的。
56、进一步地,所述确定模块包括:
57、划分单元,用于基于所述聚类簇在目标车辆坐标系内水平坐标轴向、垂直坐标轴向上的投影值、所述聚类簇中扫描点的水平坐标值,将所述挡墙点集合中的挡墙点划分为至少一个方位的挡墙点,所述目标车辆坐标系为以所述目标车辆的后轴线中心点为中心,车辆右侧为水平坐标轴正向,车头方向为垂直坐标轴正向构建的平面坐标系;
58、第三计算单元,用于针对每个方位的挡墙点,分别计算所述挡墙点的凹包数据,并将所述凹包数据配置为对应方位的道路边界点数据。
59、根据本发明的又一方面,提供了一种存储介质,所述存储介质中存储有至少一可执行指令,所述可执行指令使处理器执行如上述道路边界的识别方法对应的操作。
60、根据本发明的再一方面,提供了一种终端,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
61、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行上述道路边界的识别方法对应的操作。
62、借由上述技术方案,本发明实施例提供的技术方案至少具有下列优点:
63、本发明提供了一种道路边界的识别方法及装置、存储介质、终端,本发明实施例通过获取目标车辆的路径规划数据及所述目标车辆的后向监测雷达采集的目标区域的点云数据,并对所述点云数据进行栅格化处理,得到平面点云栅格中每个栅格内点云的高度极值;基于所述路径规划数据、所述每个栅格内点云的高度极值依次进行挡墙候选栅格提取、挡墙类别检测,确定所述目标区域内的挡墙候选栅格及挡墙类别,并基于所述挡墙候选栅格、及与所述挡墙类别对应的挡墙点提取策略,提取得到挡墙点集合;基于所述挡墙点集合中挡墙点的聚类簇,确定至少一个方位的道路边界点数据,并将所述道路边界点数据发送至所述目标车辆的控制端,以使所述控制端基于所述道路边界点数据进行后向道路边界识别,大大减少了栅格对挡墙点提取的限制,大大提高了挡墙点提取精度,同时,针对不同挡墙类别基于不同的挡墙点策略进行提取,从而有效提高挡墙点识别的准确度,进而提高道路边界识别准确度。
64、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!