空中机群红外序列配准方法、多尺度目标测谱方法及系统
本发明属于光电图像处理,更具体地,涉及一种空中机群红外序列配准方法、多尺度目标测谱方法及系统。
背景技术:
1、随着航空领域技术的高速发展,对空领域安全有了更高要求,对空目标的识别也变得非常重要。利用传统的图像处理方法无法单纯从红外图像中区分目标类型,需要应用图谱关联识别方法与设备,即结合目标的红外图像与光谱数据来进行光谱识别。在图谱关联识别方法中,将视场中心的一部分区域作为测谱光阑,该光阑中的所有能量被设备接收,生成相应的宽波段光谱数据。
2、实际场景下,光阑吸收的能量为目标与背景的混合能量,为获得目标真实光谱,须对混合光谱进行光谱解混,即计算目标在光阑内占比,减去混合能量中背景部分,得到目标光谱。因光阑吸收该部分所有能量,所以光阑位置在红外图像中不成像,无法从单帧图像中计算出目标占比,但空中机群在某一时间窗具有姿态上的稳定性,可以通过图像配准的思想,将前几帧未进入光阑时的目标变换到下几帧目标在光阑内的图像中。
3、图像配准是指将同一场景下的不同图像“对齐”或者进行广义的匹配,以消除存在的几何畸变。对同一场景使用相同或不同的传感器,在不同条件下获取的两个或多个图像一般都会有差异。同一场景的多次成像的差别可以表现在:不同的分辨率、不同的灰度属性、不同的位置、不同的尺度、不同的非线性变换等。
4、现有图像配准方法大致分为三类,第一类是基于图像灰度;第二类是基于图像特征;第三类是基于图像的理解和解释。现有图像配准方法多为可见光图像配准,可见光图像信噪比高,噪声干扰小,容易完成目标特征的提取与匹配。而在高帧率红外探测器中,其成像积分时间短,图像具有噪声大、信噪比低、非均匀性等特点。现有图像配准方法极易受图像质量影响,造成特征点混淆。而且在空中动目标编队机群的场景下,飞机尺度变化大,目标多,且背景多为云或天空,图像提取到的特征点大多为编队飞机或噪声的特征点,而多架飞机的特征点极其相似,在特征匹配时会造成特征点配准的交叉,无法得到正确图像变换关系。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种空中机群红外序列配准方法、多尺度目标测谱方法及系统,旨在解决现有图像配准方法对空中动目标机群红外图像的配准准确性较低的问题。
2、为实现上述目的,第一方面,本发明提供了一种空中机群红外序列配准方法,包括:
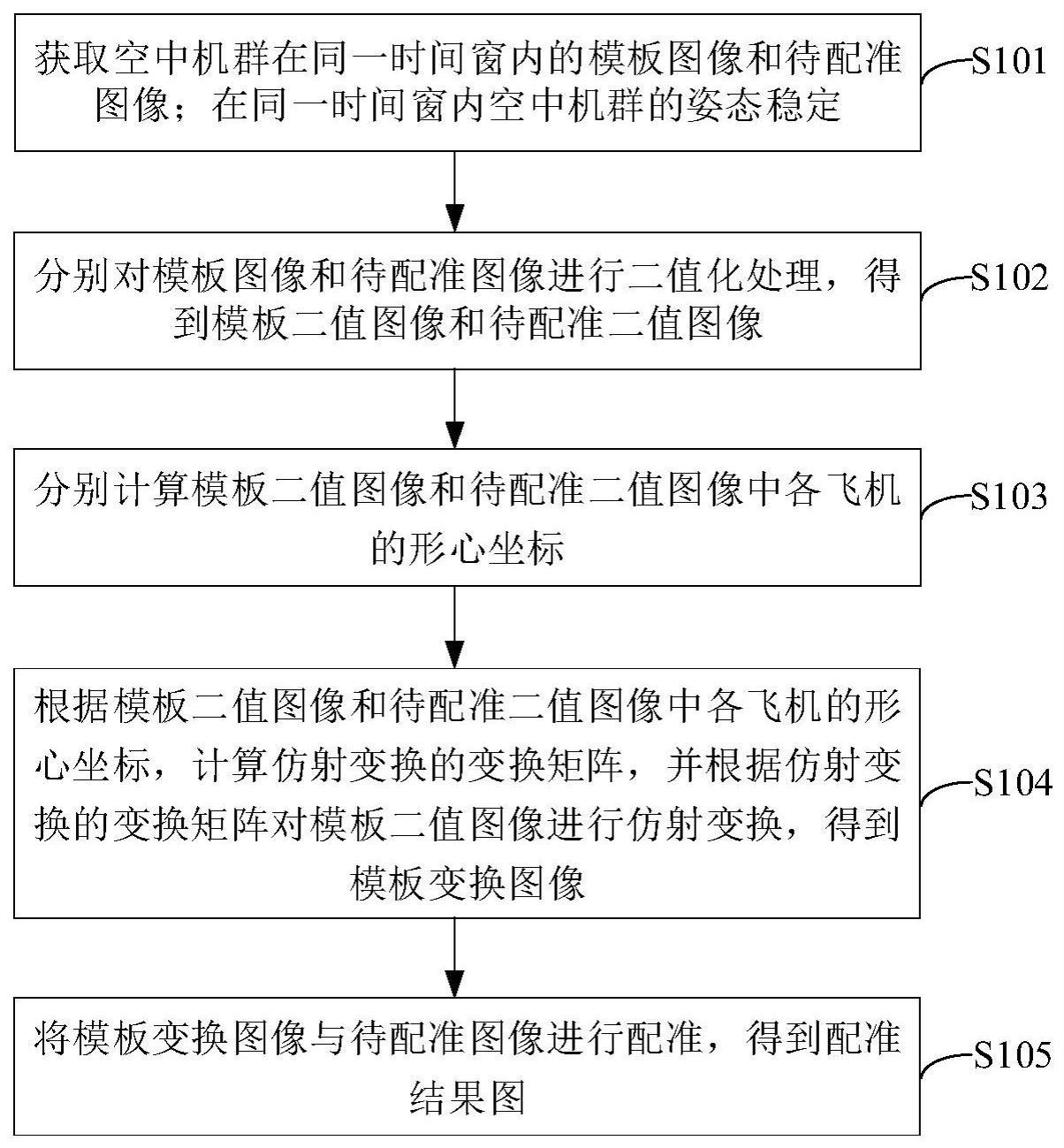
3、s101获取空中机群在同一时间窗内的模板图像和待配准图像;在所述同一时间窗内空中机群的姿态稳定;
4、s102分别对所述模板图像和所述待配准图像进行二值化处理,得到模板二值图像和待配准二值图像;
5、s103分别计算所述模板二值图像和所述待配准二值图像中各飞机的形心坐标;
6、s104根据所述模板二值图像和所述待配准二值图像中各飞机的形心坐标,计算仿射变换的变换矩阵,并根据仿射变换的变换矩阵对所述模板二值图像进行仿射变换,得到模板变换图像;
7、s105将所述模板变换图像与所述待配准图像进行配准,得到配准结果图。
8、在一个可选的示例中,s104具体包括:
9、分别从所述模板二值图像和所述待配准二值图像中各飞机的形心坐标中选取不同的形心坐标组合;
10、根据所述模板二值图像对应的形心坐标组合和所述待配准二值图像对应的形心坐标组合,计算对应的候选变换矩阵;
11、根据各候选变换矩阵对所述模板二值图像进行仿射变换,得到各候选模板变换图像;
12、计算待配准二值图像与所述各候选模板变换图像的交并比,将交并比最大的候选变换矩阵作为所述变换矩阵,将交并比最大的候选模板变换图像作为所述模板变换图像。
13、在一个可选的示例中,所述二值化处理包括阈值分割和连通域检测。
14、第二方面,本发明提供了一种多尺度目标测谱方法,包括:
15、s201对空中机群进行图像采集,并对空中机群中的目标进行目标跟踪和测谱;
16、s202在同一时间窗内,获取目标未进入光阑区域时的第一红外图像和光阑区域的背景光谱,以及获取目标进入光阑区域时的第二红外图像和光阑区域的混合光谱;
17、s203将所述第一红外图像作为模板图像,所述第二红外图像作为待配准图像,并根据如第一方面所述的空中机群红外序列配准方法进行配准,得到配准结果图;
18、s204根据所述配准结果图,获得目标在光阑区域中所占的像素数以及光阑区域的像素数并计算目标在光阑中占比;
19、s205根据所述目标在光阑中占比以及所述背景光谱,对所述混合光谱进行光谱解混,得到目标光谱。
20、在一个可选的示例中,所述目标为整个机群、某一飞机或某一飞机部位。
21、第三方面,本发明提供了一种空中机群红外序列配准系统,包括:
22、图像获取模块,用于获取空中机群在同一时间窗内的模板图像和待配准图像;在所述同一时间窗内空中机群的姿态稳定;
23、图像二值化模块,用于分别对所述模板图像和所述待配准图像进行二值化处理,得到模板二值图像和待配准二值图像;
24、形心计算模块,用于分别计算所述模板二值图像和所述待配准二值图像中各飞机的形心坐标;
25、仿射变换模块,用于根据所述模板二值图像和所述待配准二值图像中各飞机的形心坐标,计算仿射变换的变换矩阵,并根据仿射变换的变换矩阵对所述模板二值图像进行仿射变换,得到模板变换图像;
26、图像配准模块,用于将所述模板变换图像与所述待配准图像进行配准,得到配准结果图。
27、在一个可选的示例中,所述仿射变换模块具体用于:
28、分别从所述模板二值图像和所述待配准二值图像中各飞机的形心坐标中选取不同的形心坐标组合;
29、根据所述模板二值图像对应的形心坐标组合和所述待配准二值图像对应的形心坐标组合,计算对应的候选变换矩阵;
30、根据各候选变换矩阵对所述模板二值图像进行仿射变换,得到各候选模板变换图像;
31、计算待配准二值图像与所述各候选模板变换图像的交并比,将交并比最大的候选变换矩阵作为所述变换矩阵,将交并比最大的候选模板变换图像作为所述模板变换图像。
32、在一个可选的示例中,所述图像二值化模块中的所述二值化处理包括阈值分割和连通域检测。
33、第四方面,本发明提供了一种多尺度目标测谱系统,包括:
34、图谱采集模块,用于对空中机群进行图像采集,并对空中机群中的目标进行目标跟踪和测谱;
35、图谱获取模块,用于在同一时间窗内,获取目标未进入光阑区域时的第一红外图像和光阑区域的背景光谱,以及获取目标进入光阑区域时的第二红外图像和光阑区域的混合光谱;
36、图像配准模块,用于将所述第一红外图像作为模板图像,所述第二红外图像作为待配准图像,并根据如第一方面所述的空中机群红外序列配准方法进行配准,得到配准结果图;
37、占比计算模块,用于根据所述配准结果图,获得目标在光阑区域中所占的像素数以及光阑区域的像素数并计算目标在光阑中占比;
38、光谱解混模块,用于根据所述目标在光阑中占比以及所述背景光谱,对所述混合光谱进行光谱解混,得到目标光谱。
39、在一个可选的示例中,所述图谱获取模块中的所述目标为整个机群、某一飞机或某一飞机部位。
40、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
41、本发明提供一种空中机群红外序列配准方法、多尺度目标测谱方法及系统,通过获取空中机群在同一姿态稳定的时间窗内的模板图像和待配准图像,并分别进行二值化处理,分别计算模板二值图像和待配准二值图像中各飞机的形心坐标,由此计算仿射变换的变换矩阵,将模板二值图像变换到待配准二值图像上再与原始的待配准图像进行叠加,从而实现了空中机群红外图像序列的快速准确配准,可以消除待配准图像中存在的目标残缺,为后续获取目标光谱数据提供了坚实的技术基础。
- 还没有人留言评论。精彩留言会获得点赞!