一种运输车辆定位展示方法、装置、存储介质及设备与流程
本技术涉及定位,具体而言,涉及一种运输车辆定位展示方法、装置、存储介质及设备。
背景技术:
1、铁水运输是钢厂物流系统与生产联系最紧密的环节,高炉到炼钢厂之间往往有数公里的距离,为了提升运行效率,调度人员需要得知每辆机车和每个罐车的实时位置与去向。然而,在现有铁水运输环境中,地图图形采用工位点全列出的展示方式,只能呈现机车、罐车运输任务完成后的最终位置效果,现场调度人员只能通过对讲机或电话沟通的方式获悉行进机车、罐车在厂内的具体地点。若任务执行过程中出现异常情况,机车及罐车最终目的地可能发生变更,这会导致机车、罐车最终位置无法与实际位置对应,造成运输、调度困难,影响生产效率。
技术实现思路
1、本技术实施例的目的在于提供一种运输车辆定位展示方法、装置、存储介质及设备,旨在解决相关技术中存在的调度人员只能通过对讲机或电话沟通的方式获悉行进机车、罐车在厂内的具体地点,影响生产效率的问题。
2、第一方面,本技术实施例提供的一种运输车辆定位展示方法,包括:
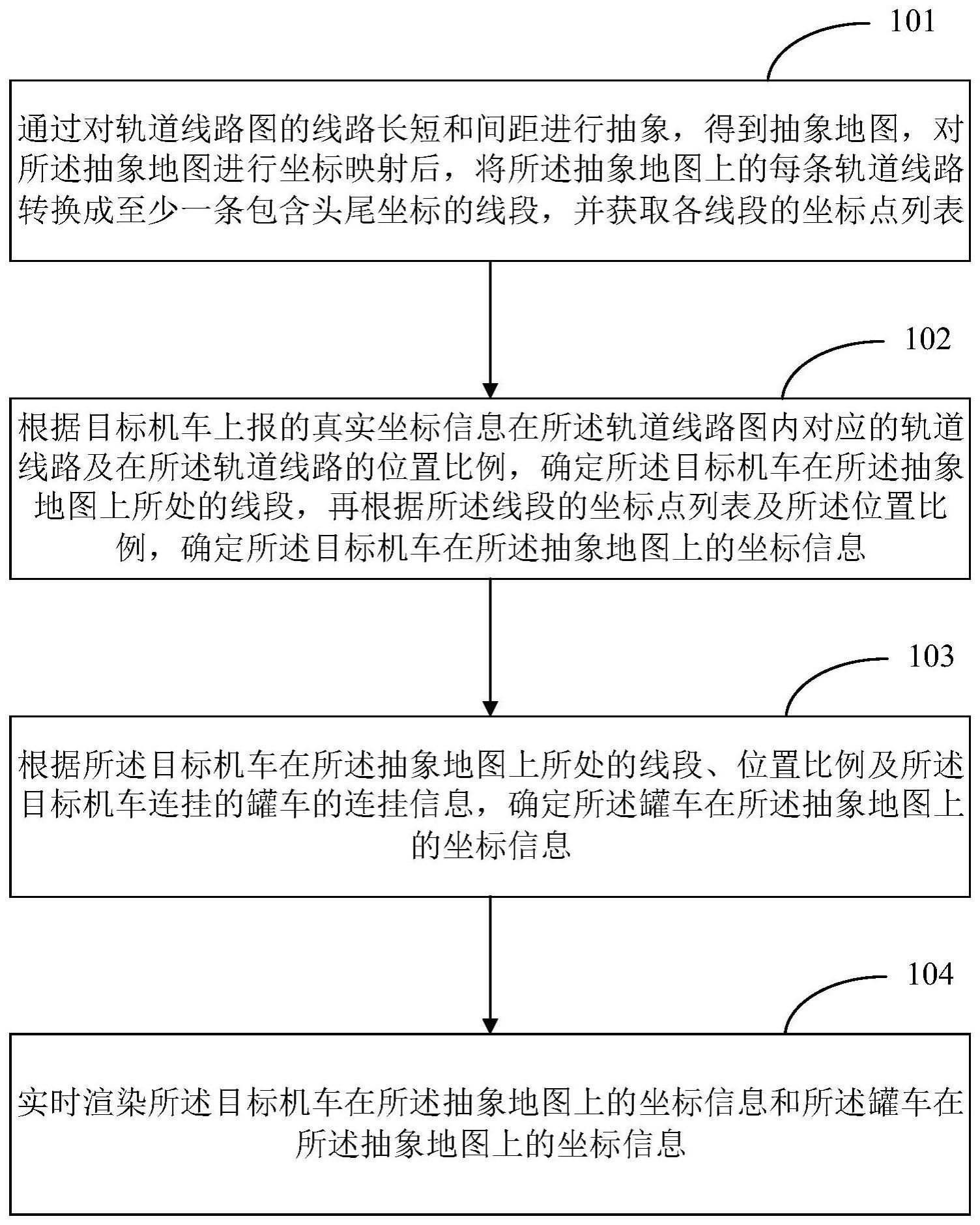
3、通过对轨道线路图的线路长短和间距进行抽象,得到抽象地图,对所述抽象地图进行坐标映射后,将所述抽象地图上的每条轨道线路转换成至少一条包含头尾坐标的线段,并获取各线段的坐标点列表;
4、根据目标机车上报的真实坐标信息在所述轨道线路图内对应的轨道线路及在所述轨道线路的位置比例,确定所述目标机车在所述抽象地图上所处的线段,再根据所述线段的坐标点列表及所述位置比例,确定所述目标机车在所述抽象地图上的坐标信息;
5、根据所述目标机车在所述抽象地图上所处的线段、位置比例及所述目标机车连挂的罐车的连挂信息,确定所述罐车在所述抽象地图上的坐标信息;
6、实时渲染所述目标机车在所述抽象地图上的坐标信息和所述罐车在所述抽象地图上的坐标信息。
7、在上述实现过程中,将轨道线路图进行抽象化处理,得到抽象地图,将该抽象地图上的每条轨道线路转换成线段并获取各线段的坐标点列表,之后,根据目标机车上报的真实坐标信息在轨道线路图内对应的轨道线路及在该轨道线路的位置比例,结合线段的坐标点列表,确定目标机车在抽象地图上的坐标信息,并根据目标机车在抽象地图上所处的线段、位置比例及连挂信息,确定罐车在抽象地图上的坐标信息,从而在利于观察的抽象地图上,实时渲染机车和罐车的位置信息。如此,便于调度人员获悉行进机车、罐车在厂内的具体地点并进行调度安排,有效提升了生产效率。
8、进一步地,在一些实施例中,所述将所述抽象地图上的每条轨道线路转换成至少一条包含头尾坐标的线段,包括:
9、针对所述抽象地图上的直轨道线路,存储所述直轨道线路对应的线段的头尾两个端点在所述抽象地图上的坐标信息;
10、针对所述抽象地图上的包含道岔和弯道的曲轨道线路,根据道岔点和拐点将所述曲轨道线路分为若干个线段,并存储各线段的头尾两个端点在所述抽象地图上的坐标信息。
11、在上述实现过程中,提供一种将轨道线路转换成线段的具体方式。
12、进一步地,在一些实施例中,所述获取各线段的坐标点列表,包括:
13、根据每条线段的头尾坐标,计算每条线段的长度;
14、将所述线段等比切割,计算每个切割点的坐标信息,基于所述线段上的所有切割点的坐标信息形成所述线段的坐标点列表。
15、在上述实现过程中,根据线段的头尾坐标,利用勾股定理和切割的方式,快速、准确地获取线段的坐标点列表。
16、进一步地,在一些实施例中,所述方法还包括:
17、通过为同一轨道线路设置相同的标识,建立所述轨道线路图和所述抽象地图之间的映射关系;
18、所述根据目标机车上报的真实坐标信息在所述轨道线路图内对应的轨道线路及在所述轨道线路的位置比例,确定所述目标机车在所述抽象地图上所处的线段,包括:
19、将目标机车上报的真实坐标信息转换成所述轨道线路图使用的数据格式,确定所述真实坐标信息在所述轨道线路图内对应的轨道线路标识及在所述轨道线路的位置比例;
20、通过所述轨道线路标识和所述映射关系,确定所述目标机车在所述抽象地图上所处的轨道线路,再根据所述位置比例,确定所述目标机车在所述抽象地图上所处的线段。
21、在上述实现过程中,通过在轨道线路图与抽象地图间建立一一对应的映射关系,为确定目标机车在抽象地图上所处的线段奠定好基础。
22、进一步地,在一些实施例中,所述连挂信息包括连挂方向和罐车位序;所述根据所述目标机车在所述抽象地图上所处的线段、位置比例及所述目标机车连挂的罐车的连挂信息,确定所述罐车在所述抽象地图上的坐标信息,包括:
23、根据所述目标机车在所述抽象地图上所处的线段、位置比例及所述目标机车连挂的罐车的连挂方向和罐车位序,确定所述罐车在所述抽象地图上所处的线段及位置比例,再根据所述线段的坐标点列表及所述位置比例,确定所述罐车在所述抽象地图上的坐标信息。
24、在上述实现过程中,提供一种确定罐车在抽象地图上的坐标信息的具体方式。
25、进一步地,在一些实施例中,所述方法还包括:
26、若所述罐车是鱼雷罐,获取所述罐车在所述抽象地图上的坐标信息的前一个坐标点及后一个坐标点,基于所述前一个坐标点及后一个坐标点计算出所述罐车移动路径的斜率,并基于所述斜率计算出所述罐车在移动时的倾斜角度。
27、在上述实现过程中,若罐车为鱼雷罐,在渲染时一并计算罐车移动时的倾斜角度,方便对鱼雷罐实时位置信息的跟踪和展示。
28、进一步地,在一些实施例中,所述方法还包括:
29、在所述抽象地图上基于第一颜色的光带渲染机车任务路径对应的线段,以及基于第二颜色的光带渲染占压铁路线段。
30、在上述实现过程中,使用不同颜色的光带区分渲染机车任务路径对应的线段和占压铁路线段,从而更好地指导用户进行生产作业。
31、第二方面,本技术实施例提供的一种运输车辆定位展示装置,包括:
32、地图抽象模块,用于通过对轨道线路图的线路长短和间距进行抽象,得到抽象地图,对所述抽象地图进行坐标映射后,将所述抽象地图上的每条轨道线路转换成至少一条包含头尾坐标的线段,并获取各线段的坐标点列表;
33、机车定位模块,用于根据目标机车上报的真实坐标信息在所述轨道线路图内对应的轨道线路及在所述轨道线路的位置比例,确定所述目标机车在所述抽象地图上所处的线段,再根据所述线段的坐标点列表及所述位置比例,确定所述目标机车在所述抽象地图上的坐标信息;
34、罐车定位模块,用于根据所述目标机车在所述抽象地图上所处的线段、位置比例及所述目标机车连挂的罐车的连挂信息,确定所述罐车在所述抽象地图上的坐标信息;
35、渲染展示模块,用于实时渲染所述目标机车在所述抽象地图上的坐标信息和所述罐车在所述抽象地图上的坐标信息。
36、第三方面,本技术实施例提供的一种电子设备,包括:存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一项所述的方法的步骤。
37、第四方面,本技术实施例提供的一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,使得所述计算机执行如第一方面任一项所述的方法。
38、第五方面,本技术实施例提供的一种计算机程序产品,所述计算机程序产品在计算机上运行时,使得计算机执行如第一方面任一项所述的方法。
39、本技术公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本技术公开的上述技术即可得知。
40、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!