一种采集模块的制作方法
1.本实用新型涉及智能仓储技术领域,尤其涉及一种物料智能仓储管理系统内的采集模块。
背景技术:
2.电子元件作为电子厂家及企业生产加工的电子产品的原料,在企业的运作中起着重要的作用。电子元件常储存在仓库中,仓库管理是企业的中转站,连接销售、财务、采购、研发的重要节点,为工厂的生产及研发提供物料,保证共产的进度和企业研发的项目完成。
3.编带贴片物料由于数量体积小、规格精度、种类较多,在电子产品生产加工过程中,会出现较多的不确定因素从而影响物料数据的准确性,例如贴片机故障导致物料用量增加、物料运输过程中物料遗失等现象,都会造成物料用量数据不准确,剩余物料重新录入库存时仓库的库存数据与真实物料库存不符,会给仓库管理增加工作量,同时也会增加企业其他部门的工作量,实际物料库存少于服务器数据库内的数据时,企业还要花费较多的资金购买物料,增加了企业的经济损失。
技术实现要素:
4.本实用新型的目的在于提供一种物料智能仓储管理系统内的采集模块,用于采集物料盘的数据,给整个智能仓储管理系统提供数据基础,从而能解决上述背景技术中提出的问题。
5.为实现上述目的本实用新型所采用的技术方案是一种采集模块,用于采集物料盘的信息,包括表面测量结构和图像识别结构,表面测量结构设于物料盘的侧面位置,用于测量物料盘各个位置的半径,图像识别结构包括垂直扫描装置、水平扫描装置,水平扫描装置设于物料盘的侧面位置,用于扫描物料盘侧面影像,垂直扫描装置设于物料盘的上方位置,用于扫描物料盘的俯视图。
6.进一步地,采集模块内的表面测量结构和图像识别结构均被固定到装置主体上。
7.进一步地,垂直扫描装置、水平扫描装置为摄像机。
8.进一步地,物料盘包括编带,表面测量结构包括可伸缩的推杆,推杆能伸缩,推杆能在伸出状态下与物料盘上的物料编带抵接。
9.进一步地,推杆上设有泡沫条,推杆能在伸出状态下通过泡沫条与物料盘上的物料编带抵接。
10.进一步地,还包括用于驱动物料盘旋转的电机。
11.进一步地,电机的转轴连接有转盘,转盘上固定有物料盘,转盘的旋转中心与物料盘的中心重合。
12.进一步地,转盘上设有一根轴,该轴穿过物料盘中心。
13.进一步地,转盘上设有卡盘,卡盘用于固定物料盘。
14.进一步地,物料盘上设有标签。
15.综上所述,本实用新型的有益效果是:智能仓储管理系统内的采集模块能实现物料盘数据的精准采集,且不会对入库的物料盘造成损害,不会伤害到编带上的元器件;同时,本实用新型解决了利用光学设备对物料盘外部轮廓测量时,物料编带口位置测量不准确的问题,提高了计算精准度。
附图说明
16.图1为一种智能仓储管理系统中采集模块的结构示意图;
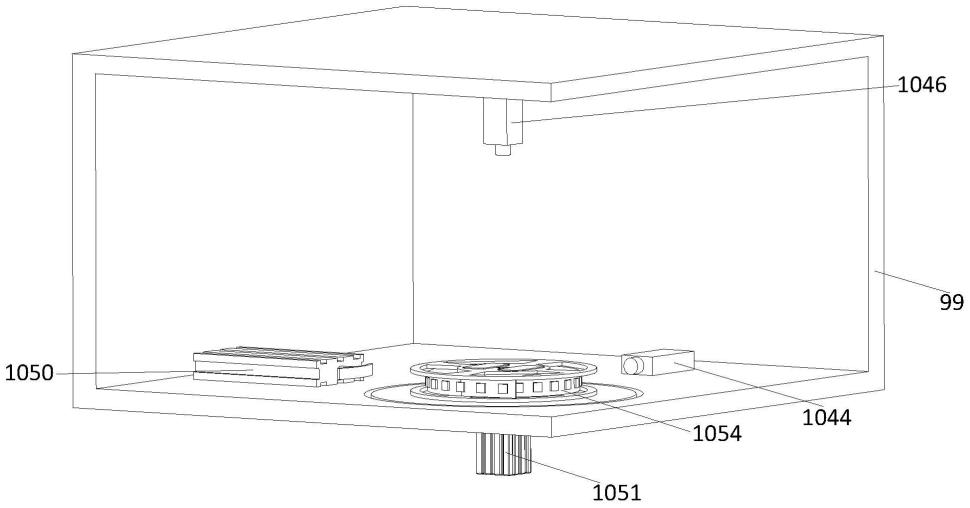
17.图2为图1隐去密闭空间后的结构示意图;
18.图3为智能仓储管理系统中的模块示意图;
19.图4为物料盘的俯视图;
20.图5为俯视图与侧视图一一对应时的示意图;
21.图6为缠绕较紧的物料盘中编带口超过编带起初位置的示意图;
22.图7为图6的外轮廓示意图;
23.图8为图6的物料盘被划分为两个部分时的示意图;
24.图9为图8中的物料盘近似模型示意图;
25.图10为缠绕较紧的物料盘中编带口未及编带起初位置的示意图;
26.图11为图10的外部轮廓示意图;
27.图12为图10的物料盘被划分为两个部分时的示意图;
28.图13为图12的物料盘近似模型示意图;
29.图14为缠绕较松的物料盘中编带口超过编带起初位置的示意图;
30.图15为图14的外轮廓示意图;
31.图16为图14的物料盘被划分为两个部分时的示意图;
32.图17为图16的物料盘近似模型示意图;
33.图18为一种缠绕较松的物料盘中编带口未及编带起初位置的示意图;
34.图19为图18的外轮廓示意图;
35.图20为图18的物料盘被划分为两个部分时的示意图;
36.图21为图20的物料盘近似模型示意图;
37.图22为另一种缠绕较松的物料盘中编带口未及编带起初位置的示意图;
38.图23为图22的外轮廓示意图;
39.图24为图22的物料盘被划分为两个部分时的示意图;
40.图25为图24的物料盘近似模型示意图;
41.图26为物料编带上有空物料时的示意图;
42.图27为物料编带断裂口位置的示意图;
43.图28为物料编带上物料的示意图。
具体实施方式
44.以下结合附图对本实用新型的实施方式做进一步详细描述,应当指出的是,实施例只是对本实用新型的详细阐述,不应视为对本实用新型的限定,本实用新型的实施例中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以
外,均能够以任何方式组合。
45.本实施例提供一种物料智能仓储管理系统,包括管理服务器101、采集模块104、运算模块103、通信模块102,管理服务器101能用于显示物料类别、物料库存,同时控制整个系统的工作与否,当系统开始工作时,管理服务器101通过通信模块102发送信号给采集模块104,采集模块104开始采集物料盘1045的信息,并通过通信模块102将信息传输至运算模块103,运算模块103根据采集模块104采集到的信息进行逻辑运算,得到物料盘1045上的物料类型以及数量,运算模块103再通过通信模块102将物料信息反馈至管理服务器101,并更新管理服务器101内的数据。
46.管理服务器
47.管理服务器101能用于显示物料信息或是输入物料信息,物料信息包括但不限于物料类别、物料库存;其中,物料类别包括但不限于0402、0603、0805和1206等元器件的封装。物料被固定在物料盘1045上。
48.管理服务器101可以是erp(企业资源计划系统,enterprise resource planning)、mes(制造执行系统,manufacturing execution system)或scm(供应链管理,supply chain management)等。
49.采集模块
50.采集模块104用于采集物料盘1045的信息,包括物料盘表面测量结构1050和图像识别结构,物料盘表面测量结构设于物料盘的侧面位置,表面测量结构1050用于测量物料盘1045各个位置的半径,并将所测得的数据通过通信模块102发送给运算模块103。图像识别结构包括垂直扫描装置1046、水平扫描装置1044,参照附图1、附图2,水平扫描装置1044设于物料盘1045的侧面位置,用于扫描物料盘侧面影像,即扫描编带口所在的侧视图。为了能获得物料盘1045完整的侧视图,物料盘1045能被电机驱动而旋转,或者水平扫描装置1044能绕着物料盘1045进行旋转,旋转一周,即可让水平扫描装置1044扫描物料盘的整个侧面形成完整的侧视图。在本实施例中,采用电机1051驱动物料盘1045旋转的方式,电机1051的转轴连接有转盘1052,转盘1052上固定有物料盘1045,转盘1052的旋转中心与物料盘1045的中心重合,转盘1052固定物料盘1045的方式有多种可选,例如通过一根轴穿过物料盘1045,或是通过卡盘(例如三角卡盘)的方式固定物料盘1045。
51.优选的,为了图像识别结构在识别图像时不受外界环境的干扰,采集模块104在封闭环境下进行,且设备的封闭环境内设有独立光源,确保图像识别结构能正常工作。
52.表面测量结构1050包括可伸缩的推杆1053,表面测量结构1050在工作时,推杆1053会伸出与物料盘1045上的物料编带1054抵接,测得此时推杆1053伸出的长度l1,而表面测量结构1050与物料盘1045中心之间的距离是确定的,为l,那么此时物料盘1045上的物料编带1054的l2半径为l2=l-l1,通过启动电机1051驱动物料盘1045旋转,表面测量结构1050就能测得物料盘1045上每个位置的半径l2。表面测量结构1050能将数据通过通信模块102传送给运算模块103。
53.优选的,推杆1053在与物料编带1054抵接的过程中,推杆1053的力不能过大,避免推杆1053对物料编带1054上的物料造成损坏。进一步地,推杆1053上设有一条泡沫条1055,泡沫条1055能避免物料编带1054上的物料损坏。泡沫条1055具有一定的厚度,因此在计算物料盘1045上每个位置的半径l2时,需要减去泡沫条1055的厚度,泡沫条1055呈条状弧形,
它的设置能让推杆1053的运动更为顺滑,不会卡入到相邻物料之间的空隙,同时,由于物料盘1045的物料编带口位置容易翘起,如果直接利用光学设备对物料盘1045进行测量外部轮廓,极有可能出现物料编带口位置测量不准确的问题,而设有泡沫条1055的推杆1053,能使在测量时,物料编带口位置的物料编带1054会与物料盘1045贴近,从而避免外部轮廓测量的误差,如果不能消除这个误差的问题,会极大的影响运算模块对物料的计数。
54.水平扫描装置1044能将扫描完成的侧视图图像发送给运算模块。垂直扫描装置1046的安装位置位于物料盘1045的上方位置,它能对物料盘1045贴有标签一面进行水平扫描,标签上直接标注有信息,或是通过二维码、条形码等方式存储有信息,垂直扫描装置1046对物料盘1045的扫描不但能形成俯视图,还能读取标签上的信息,根据标签的内容,管理服务器101能自动识别出该卷物料盘1045的物料类型,能得到物料的宽度l1、相邻物料间隔l2、物料盘中心圆的半径r、编带的厚度h等参数;同时垂直扫描装置1046也能将扫描得到的俯视图发送给运算模块,运算模块结合俯视图、侧视图能够计算出物料编带口第一颗物料在俯视图上的位置,为了后面方便运算模块的描述,定义物料编带口第一颗物料为第二节点b,定义物料编带口断裂口位置为第三节点d。
55.优选的,针对一些标签发生磨损或是缺失而导致管理服务器101无法识别的物料盘1045,运算模块能够根据水平扫描装置1044扫描得到侧视图图像进行数据运算,得到物料的宽度l
1*
、相邻物料间隔l
2*
等参数,再用识别到的物料的宽度l
1*
、相邻物料间隔l
2*
等参数与预先存在管理服务器101内的不同物料的物料的宽度参数、相邻物料间隔参数等参数进行对比,得到参数最接近的物料种类,从而将该卷标签无法识别的物料盘1045标记为该物料种类,其物料数量与同一种类能够被识别标签的物料盘上的物料数量计在一起。进一步的,管理服务器101对标签无法识别的物料盘1045进行标记,该物料盘1045虽通过运算模块计算其高概率的物料种类,但是仍存在计算出错的可能,管理服务器101对该物料盘进行标记后,方便操作人员通过人工的方式对该物料盘的物料类型进行确认,若发现物料种类识别出错,方便管理服务器101直接对该物料盘上的物料数量进行扣除,保持库存数据的高准确率。
56.优选的,采集模块内的表面测量结构和图像识别结构均被固定到装置主体99上,这使得采集模块整个为一个整体,在出厂时就安装调试完毕,需要该套系统的工厂只需在购买配套的设备以及系统后,直接将物料盘安装到装置主体99上的指定位置,即可开始物料盘信息的采集。
57.优选的,垂直扫描装置、水平扫描装置为摄像机。
58.优选的,垂直扫描装置的轴线穿过物料盘的中心,水平扫描装置的轴线穿过物料盘的中心,两个不同轴线之间的夹角为90
°
。
59.优选的,表面测量结构1050上延推杆延伸方向所在直线与垂直扫描装置的轴线或是水平扫描装置的轴线之间构成的夹角均为90
°
。
60.运算模块
61.运算模块103能进行逻辑运算,例如运算模块利用俯视图、侧视图计算出物料编带口第一颗物料在俯视图上的位置。由于侧视图是扫描物料盘1045一周所得到的图像,因此其初始扫描图像与最后扫描到的图像是一样的,侧视图能构成一个类似附图5中的环形结构1061,而此时由垂直扫描装置1046拍摄到的俯视图1062应能与环形结构1061相对应,即
每一个环形结构1061(侧视图)上的点都能在俯视图1062的外轮廓上一一对应,从而只要在环形结构1061(侧视图)上找到第一颗物料的位置,那么也相应的在俯视图1062上找到。能将上述原理运用到计算机算法中,来实现俯视图上的第一颗物料的位置定位:具体的,通过让侧视图上的像素一一与仰视图上的像素对应,再通过图像识别的方式定位侧视图上第一颗物料的位置,再利用该位置的像素与仰视图上的像素对应,实现俯视图上的第一颗物料的位置定位。
62.关于如何识别出侧视图上第一颗物料的位置,可以包括以下步骤:
63.1.参照附图5、附图27,当采集模块扫描到物料编带1054上的断裂口1041时,图像上会显示出一根线条;当采集模块扫描到物料编带1054上的空物料时,采集模块扫描到的侧视图影像上出现空白的图像;当采集模块扫描到物料编带1054上的物料时,侧视图影像上出现的是黑色的长方形。
64.2.当一个物料盘上有空物料时:第二节点b的位置为断裂口往空物料方向一侧的第一颗黑色长方形所在位置;当一个物料盘上没有空物料时,断裂口附近会识别到两个黑色长方形,在形成的侧视图中编带最外层形成的黑色长方形更清晰,而倒数第二层形成的黑色长方形较为模糊,通过对比编带断裂口1041两侧的成像清晰度,来确定第二节点b的位置。
65.运算模块还能根据表面测量结构1050所测得物料盘1045上每个位置的半径l2进行绘制物料盘1045的外部轮廓。市面上的物料盘1045通常有两种形式:一种为编带缠绕的很紧,为附图6所示;另一种为编带缠绕的较松,如附图14所示。附图6中的物料盘1045的特点是,物料盘1045的编带在绕到编带起初位置附近的地方会向外突出,通过对物料盘1045的外轮廓绘制,如附图7所示,定义这个向外突出的位置为第一节点a,表面测量结构1050在测量物料盘1045的外轮廓时,测量到在第一节点a位置时,测量结果会在短时间内发生测量数据的迅速变化,这个变化是连续的,而当测量到第三节点d位置时,测量结果会在一瞬间内发生测量数据的突变,而在优弧ab段以及劣弧ab段,这两段它们的半径几乎是不变的,即呈圆弧状。起初位置可以理解为物料盘中心点与编带初始所在位置所连成的射线。
66.利用表面测量结构1050对采用缠绕很紧的绕卷方式的物料盘1045进行数据采集,运算模块根据所采集的数据进行分析,缠绕很紧的绕卷方式的物料盘1045具有两种具体情况:
67.如附图6、附图7所示,第一种为编带口超过编带起初位置,此时的运算模块能识别到的外轮廓上的第一节点a和第三节点d,第三节点d超出第一节点a位置。
68.如附图10、附图11所示,第二种为编带口未及编带起初位置,此时的运算模块能识别到的外轮廓上的第一节点a和第三节点d,第三节点d未及第一节点a位置。
69.关于如何区分编带口是超出编带起初位置还是未及编带起初位置,这与编带的绕卷方向有关,现定义物料盘1045外轮廓的逆时针方向上存在半径逐渐变大的点或者区间时,物料盘1045为正放;即对应的,物料盘1045外轮廓的逆时针方向上存在半径逐渐变小的点或者区间时,物料盘1045为倒放。当物料盘1045在正放状态下,如果第三节点d与第一节点a在逆时针方向上的距离大于第一节点a与第三节点d在逆时针方向上的距离时,即附图6、附图7中的状态,第三节点d为超过编带起初位置;如果第三节点d与第一节点a在逆时针方向上的距离小于第一节点a与第三节点d在逆时针方向上的距离时,即附图10、附图11中
的状态,第三节点d为未及编带起初位置。当物料盘1045在倒放状态下,如果第三节点d与第一节点a在顺时针方向上的距离大于第一节点a与第三节点d在顺时针方向上的距离时,第三节点d为超过编带起初位置;如果第三节点d与第一节点a在顺时针方向上的距离小于第一节点a与第三节点d在顺时针方向上的距离时,第三节点d为未及编带起初位置。
70.另一种为编带缠绕的较松,例如附图14,它的物料盘1045的特点是,这种物料盘1045的编带在绕到编带起初位置附近的地方不会突然向外突出,而是在之前一段位置就开始缓慢的向外突出,如附图14所示,定义开始向外突出的位置为第四节点c,结束向外突出的位置为第五节点e,表面测量结构1050测量物料盘1045位于弧ce段位置的半径,其半径逐渐增大,c位置半径最小,直到a位置其半径来到最大;测量物料盘1045位于弧ed段位置的半径几乎不变;而当测量到在第三节点d位置时,测量结果会在一瞬间内发生测量数据的突变;测量物料盘1045位于弧dc段位置的半径几乎不变。
71.利用表面测量结构1050对较松绕卷方式的物料盘1045进行数据采集,运算模块根据所采集的数据进行分析,较松绕卷方式的物料盘1045具有三种具体情况:
72.第一种情况,如附图14所示,编带口超过编带起初位置,此时的运算模块能识别到物料盘1045的外轮廓上有两个长半径与短半径的交界点(图15中的c、e两点),以及一个测量数据突变点(点d),数据突变点不位于两个交界点之间;
73.第二种情况,编带口未及编带起初位置,如附图18所示,此时的运算模块能识别到物料盘1045的外轮廓上有两个长半径与短半径的交界点(图19中的c、e两点),以及一个测量数据突变点(点d),数据突变点位于两个交界点之间;
74.第三种情况,编带口未超过编带起初位置,如附图22所示,此时的运算模块能识别到物料盘1045的外轮廓上有两个长半径与短半径的交界点(图23中的c、e两点),以及一个测量数据突变点(点d),且数据突变点不位于两个交界点之间。
75.在上述运算模块通过表面测量结构1050对物料盘1045的外轮廓进行数据采集过程中,通过表面测量结构1050测得的第三节点d与通过图像识别结构得到的第三节点d能进行比对,实现对第三节点d的二次确认,提高系统算法的准确率。一般情况下,第三节点d的位置与第二节点b的位置较为靠近,如果确保第三节点d的位置不会识别错误,也能极大的保证第二节点b的位置不会识别错误,而第二节点b的位置涉及物料数量的统计,十分重要,下文会详细描述。
76.运算模块能根据表面测量结构1050测得的外轮廓数据计算出物料的数量,具体的,编带缠绕很紧的物料盘1045与编带缠绕较松的物料盘1045由于其缠绕的松紧度不同,算法略有差异。下面详细介绍运算模块的算法原理,以便于本领域的技术人员更好的理解本实用新型的技术方案:
77.参照附图6-附图7、附图11-附图12,在编带缠绕很紧的物料盘1045中:其在第一节点a以及以前(内侧)的编带(附图8中的阴影部分、附图12中的阴影部分)可以近似于一个一个圆环编带的和(附图9中的圆环部分、附图13中的圆环部分),假设第一节点a在测得数据发生迅速变化过程中,较小的半径为r,物料盘上一共绕卷了n层编带,则上述阴影部分的编带长度为:
78.l1=2π[(r+h)+(r+2h)+
……
+(r+nh)]
[0079]
化简为:
[0080]
l1=πn
·
(2r+n+nh)
[0081]
其中,
[0082][0083]
所以,
[0084][0085]
参照附图14-附图15、附图18-附图19、附图22-附图23,在编带缠绕较松的物料盘1045中:其在第五节点e以及以前(内侧)的编带(附图16中的阴影部分、附图20中的阴影部分、附图21中的阴影部分),这些阴影部分虽然不能像缠绕的很紧的物料盘1045的那样直接等同于一个一个圆环编带的和,但是可以在略微形变后,进行转化,例如将阴影部分以圆心与第五节点e的连线作为分割线,将分割线上下两侧的编带相向移动此时形变后的阴影部分可以近似于一个一个圆环编带的和(附图17中的圆环部分、附图21中的圆环部分、附图25中的圆环部分),假设第五节点e附近所测得的最大的半径为r,阴影部分的编带一共绕卷了n层,则上述阴影部分的编带长度为:
[0086][0087]
化简为:
[0088]
l1=πn
·
(2r+2h+nh)
[0089]
其中,
[0090][0091]
所以,
[0092][0093]
参照附图6、附图10、附图14、附图18、附图22,物料除了阴影部分的物料外,还有部分超出阴影部分的物料,上面已经求得阴影部分的编带的长度,还需要求得超出部分的编带长度。
[0094]
参照附图9、附图13,在编带缠绕很紧的物料盘1045中,由于第一节点a与第二节点b均能被精准定位,因此第一节点a与第二节点b在物料盘的外轮廓上所呈夹角θ是能被运算模块精准计算的,所以超出部分的编带长度为:
[0095][0096]
参照附图在编带缠绕较松的物料盘1045中,由于第五节点e与第二节点b均能被精准定位,因此第五节点e与第二节点b在物料盘的外轮廓上所呈夹角θ是能被运算模块精准计算的,所以超出部分的编带长度为:
[0097][0098]
需要注意的是,因为第一节点a与第二节点b或是第五节点e与第二节点b所呈夹角θ有优角(大于180
°
小于360
°
)、劣角(大于0
°
小于180
°
)以及正角(逆时针旋转的角)、负角(顺时针方向旋转而成的角)之分,什么时候θ取优角,什么时候θ取劣角,什么时候θ取正角,什么时候θ取负角,这些都会影响到运算模块对物料数量的计算。这就涉及物料盘的正放、倒放,上面已经详细描述了关于如何区分物料盘的正放、倒放状态,因此这里参照附图8、附图12、附图16、附图20给出结论,当物料盘正放时,θ为从第一节点a逆时针到第二节点b的正角,或是从第五节点e逆时针到第二节点b的正角;当物料盘倒放时,θ为从第一节点a逆时针到第二节点b的负角,或是从第五节点e逆时针到第二节点b的负角。根据物料盘的实际情况,θ可能为优角或是劣角。
[0099]
编带的总长度可表示为:
[0100]
l
总
=l1+l2[0101]
其中,编带缠绕很紧的物料盘1045的总长度为,
[0102][0103]
编带缠绕较松的物料盘1045的总长度为,
[0104][0105]
物料的实际数量等于编带总长度除以相邻物料之间同一侧的距离,
[0106][0107]
即,编带缠绕很紧的物料盘1045上物料的数量t
(x)
为:
[0108][0109]
编带缠绕较松的物料盘1045上物料的数量t
(x)
为:
[0110][0111]
优选的,为了提高对物料识别的精准度,上述物料计数时算入补充系数k,即,在算出的物料数量t
(x)
的基础上再加上系数k,系数k可以为正数也可以为负数,它可以与物料的层数进行匹配,当运算模块计算出上述的参数n后,会自动匹配到一个系数k,对其结果进行修正,系数k可以由操作人员根据现实中的物料盘1045的状况进行设置,例如n=3时,k=+1;n=6时,k=+3。系数k的引入后使得物料的数量统计更为精准。系数k尤其适用于编带缠绕较松的物料盘1045,在编带缠绕很紧的物料盘1045上可以不引入系数k。
[0112]
优选的,关于如何确定第二节点b位于断裂口1041的哪一侧,除了上述的通过对比编带断裂口1041两侧的成像清晰度来进行区分,还能通过在物料盘的正放、倒放来进行判
断,当物料盘正放时,第二节点b位于断裂口1041顺时针方向一侧(基于俯视图方向);当物料盘倒放时,第二节点b位于断裂口1041逆时针方向一侧。
[0113]
通信模块
[0114]
通信模块102用于各个模块之间的数据传输及信号传输,例如管理服务器101通过通信模块102发送信号给采集模块104;采集模块104通过通信模块102将信息传输至运算模块103;运算模块103通过通信模块102将信息发送至管理服务器101等。通信模块可以是线缆通信、2g、3g、4g、5g通信模块、wifi通信模块、zigbee协议、nb-iot通信和蓝牙通信。
[0115]
需要注意的是,本实用新型中如果没有特指,顺时针方向、逆时针方向均是基于物料盘俯视图方向进行判断的。以上所述,仅为实用新型的具体实施方式,但实用新型的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在实用新型的保护范围之内,因此,实用新型的保护范围应该以权利要求书所限定的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1