一种轮对踏面多边形检测系统的制作方法
1.本实用新型涉及轨道车辆检测技术领域,尤其涉及一种轮对踏面多边形检测方法及系统。
背景技术:
2.车轮是关系到列车运行安全的关键部分,它把车辆的载荷传给钢轨,并在钢轨上转动来完成列车的运行,是列车运行的最终受力部件。铁路车辆在长时间的运行过程中,车轮踏面会产生不均匀磨耗造成车轮不圆,车轮不圆将会使得车辆前后轮易发生高频轮轨冲击振动,引发轴箱等连接部位振动加剧以及踏面出现磨耗超限、擦伤、剥离、磕伤等表面缺陷质量问题,这些问题可能会直接导致脱轨事故的发生,影响列车运行安全。因此,需要对车轮踏面进行日常动态检测,保障列车运行安全。
3.国内外在车轮多边形测量的原理及方法上开展了一系列的研究,例如利用激光非接触测量方式进行轮对自动测量的装置应用十分广泛,但此类型的装置仅适用于轮对分解后,在专用检测设备上完成。目前,轮对运用检修作业时,是通过人工使用检器、内距尺、轮径尺、踏面检查仪等量具完成。由于检测方法和精度限制,这些量具难以辨别细微的车轮多边形变化,无法完全消除安全隐患。
4.综上所述,现有的轮对踏面多边形检测方法存在不便于检测,检测结果可靠性低的问题。
技术实现要素:
5.本实用新型的目的是提供一种轮对踏面多边形检测方法及系统,解决了现有轮对踏面多边形检测方法存在不便于检测,检测结果可靠性低的问题,可达到方便准确检测轮对踏面多边形的效果。
6.为达到上述实用新型目的,本实用新型采用的技术方案是,一种轮对踏面多边形检测方法,包括以下步骤:步骤sl:采集列车轮对的踏面径向跳动数据;s2:提取所述轮对踏面多边形数据对应的轮对表面点云数据;s3:直角坐标系下,提取x方向距车轮内侧端面70mm处的圆截面的z数据,为轮对踏面名义滚动圆;s4:提取出轮对踏面图像;s5:基于所述轮对踏面图像和轮对踏面名义滚动圆,生成轮对踏面三维点云图、轮对踏面圆周坐标图和轮对踏面极坐标图;s6:基于所述轮对踏面圆周坐标图和轮对踏面极坐标图,展平轮对踏面三维点云图,生成轮对缺陷区域。
7.可选地,所述s1包括:激光位移传感器、编码器、单片机、第二蓝牙,对转动中轮对踏面实时扫描采集径向跳动数据。
8.可选地,所述s2包括:获取转动的轮对踏面径向跳动数据,为激光位移传感器到轮对踏面的距离差值,构建所述轮对踏面多边形数据与轮对表面点云数据的映射关系。
9.可选地,所述s5包括:轮对踏面三维点云图,其x轴为踏面横向坐标,y轴为轮对周长方向,即编码器采样间隔,z轴方向为踏面轮廓到激光位移传感器的距离。
10.可选地,生成轮对尺寸包括:生成所述轮对踏面三维点云图后,基于轮对轮径方向,提取多条轮对踏面外形轮廓曲线并计算出所述轮对踏面尺寸。
11.可选地,生成缺陷区域包括:生成所述轮对踏面三维点云图后,展平三维点云图,进行所述轮对踏面三维点云图和所述轮对踏面多边形数据差异判别,通过差异检测生成轮对缺陷区域。
12.可选地,所述差异检测是基于图像边缘点聚类分块算法,对聚集在一起的数据点连通编号,得到轮对踏面的伤损缺陷,计算其深度、面积以及位置。
13.相应地,本发明提供,一种轮对踏面多边形检测系统,包括:激光位移传感器单元,用于采集轮对踏面多边形数据;数据处理单元,基于所述轮对踏面表面点云数据和激光位移传感器单元参数生成轮对踏面三维点云图,并基于所述轮对踏面三维点云图生成轮对踏面尺寸和轮对踏面缺陷区域。
14.上述的一种轮对踏面多边形检测系统,所述激光位移传感器单元包括激光位移传感器、编码器、单片机、第二蓝牙和永磁靠件,激光位移传感器、编码器、单片机、第二蓝牙都固定在永磁靠件上,永磁靠件吸附在钢轨上,编码器紧贴在轮对踏面上。
15.上述的一种轮对踏面多边形检测系统,所述激光位移传感器为线激光位移传感器,但不仅限于线激光位移传感器。
16.上述的一种轮对踏面多边形检测系统,所述数据处理单元包括上位机和第一蓝牙,上位机和第一蓝牙连接,数据处理单元生成轮对踏面三维点云图后,基于轮对轮径方向,提取多条轮对外形轮廓曲线并计算出所述轮对尺寸,并通过展平轮对踏面三维点云图,进行所述轮对踏面三维点云图和所述轮对踏面多边形数据差异判别,通过差异检测生成轮对踏面缺陷区域,基于图像边缘点聚类分块算法,对聚集在一起的数据点连通编号,得到轮对踏面的伤损缺陷,计算其深度、面积以及位置。
17.本实用新型的首要改进之处为提供的一种轮对踏面多边形检测方法,通过激光位移传感器、编码器、单片机、第二蓝牙实时获取转动的轮对踏面径向跳动数据,构建轮对踏面多边形数据与轮对踏面表面点云数据的映射关系,进而通过轮对踏面三维点云图和轮对踏面多边形数据的差异判别,实现轮对踏面尺寸的准确提取和缺陷区域精准计算。该检测方法不需要将轮对分解,即可实现对轮对踏面多边形检测,检测方法“精确、方便、快捷”,解决了现有轮对踏面多边形检测方法存在不便于检测,检测结果可靠性低的问题,可达到方便准确检测轮对踏面多边形的效果。
附图说明
18.图1为本实用新型的一种轮对踏面多边形检测方法的简化流程图;
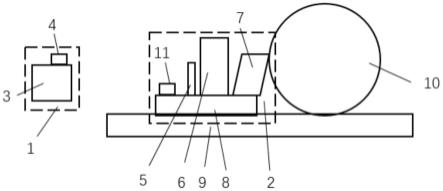
19.图2为本实用新型的一种轮对踏面多边形检测系统的示意图;
20.图3为本实用新型的轮对圆周坐标、轮对极坐标示例图。
21.图中1.数据处理单元,2.激光位移传感器单元,3.上位机,4.第一蓝牙,5.单片机,6.激光位移传感器, 7.编码器,8.永磁靠件,9.钢轨,10.轮对,11.第二蓝牙。
具体实施方式
22.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合附图和具
体实施例对本实用新型作进一步的详细说明。
23.如图1、图2所示,一种轮对踏面多边形检测方法,包括:
24.sl:采集轮对踏面多边形数据。
25.进一步的,所述sl包括:编码器7紧贴在轮对10踏面上,轮对10转动时编码器7随着规律转动,激光位移传感器6接收编码器7传输的脉冲信号,对应一个脉冲信号一组数据值,采集的数据为激光位移传感器6到轮对10踏面的距离。
26.s2:提取所述轮对踏面径向跳动数据对应的轮对表面点云数据。
27.进一步的,所述s2包括:激光位移传感器6获取的数据传递到单片机5,进而通过第一蓝牙4将数据以无线方式传递到第二蓝牙11上,构建轮对踏面多边形数据与轮对表面点云数据的映射关系,由上位机3 通过第二蓝牙11进行轮对表面点云数据的提取。
28.s3:直角坐标系下,提取x方向距车轮内侧端面70mm处的圆截面的z数据,为轮对踏面名义滚动圆。
29.进一步的,所述s3包括:通过上位机3提取到的轮对表面点云数据,提取出轮对踏面名义滚动圆。
30.s4:提取出轮对踏面图像。
31.进一步的,所述s4包括:在轮对踏面名义滚动圆基础上,取得转动所有数据平均值的参考值,后续每扫描线以此值作差作为表面粗糙度的跳动值,从而提取出轮对踏面图像。
32.s5:基于所述轮对踏面图像和轮对踏面名义滚动圆,生成轮对踏面三维点云图、轮对踏面圆周坐标图和轮对踏面极坐标图。
33.进一步的,所述s5包括:采用mat图像结构,采集的数据赋值到该图像中,形成轮对踏面三维数据,其x轴为踏面横向坐标,y轴为轮对周长方向,即编码器7采样间隔,z轴方向为踏面轮廓到激光位移传感器6的距离,进而生成轮对三维点云图、轮对踏面圆周坐标图和轮对踏面极坐标图。
34.s6:基于所述轮对踏面圆周坐标图和轮对踏面极坐标图,展平轮对踏面三维点云图,生成轮对踏面缺陷区域。
35.进一步的,如图3所示,为轮对踏面圆周坐标图和轮对踏面极坐标图,生成轮对尺寸包括:生成所述轮对踏面三维点云图后,基于轮对轮径方向,提取多条轮对踏面外形轮廓曲线并计算出所述轮对尺寸。
36.更进一步的,生成缺陷区域包括:生成所述轮对踏面三维点云图后,展平轮对踏面三维点云图,进行所述轮对踏面三维点云图和所述轮对踏面多边形数据差异判别,通过差异检测生成轮对缺陷区域。
37.更进一步的,所述差异检测是基于图像边缘点聚类分块算法,对聚集在一起的数据点连通编号,得到轮对踏面的伤损缺陷,计算其深度、面积以及位置。
38.由于现有的轮对踏面多边形检测方法存在不便于检测,检测结果可靠性低的问题,本发明提供的一种轮对踏面多边形检测方法,通过激光位移传感器、编码器、单片机、第二蓝牙实时获取转动的轮对踏面多边形数据,构建轮对踏面多边形数据与轮对踏面点云数据的映射关系,进而通过轮对踏面三维点云图和轮对踏面多边形数据的差异判别,实现轮对尺寸的准确提取和缺陷区域精准计算。该检测方法不需要将轮对分解,即可实现对轮对踏面多边形检测,检测方法“精确、方便、快捷”,解决了现有轮对踏面多边形检测方法存在
不便于检测,检测结果可靠性低的问题,可达到方便准确检测轮对踏面多边形的效果。
39.相应的,如图2所示,本实用新型提供,一种轮对踏面多边形检测系统,包括:激光位移传感器单元 2,用于采集列车轮对的踏面径向跳动数据;数据处理单元1,构建轮对踏面多边形数据与轮对踏面点云数据的映射关系,进而通过轮对踏面三维点云图和轮对踏面多边形数据的差异判别,实现轮对踏面尺寸的准确提取和缺陷区域精准计算。其中,激光传感器单元和数据处理单元连接。
40.进一步的,所述激光位移传感器单元2,激光位移传感器6、编码器7、单片机5、第二蓝牙11都固定在永磁靠件8上,永磁靠件8吸附在钢轨9上,采集时编码器7紧贴在轮对10踏面上,轮对10转动时编码器7随着规律转动,激光位移传感器6与编码器7连接并接收编码器7传输的脉冲信号,对应一个脉冲信号一个数据值进行采集,激光位移传感器6和单片机5连接,采集的数据传输到单片机5中,单片机 5连接第二蓝牙11,进而通过第二蓝牙11与上位机通信。
41.进一步的,所述数据处理单元1,上位机3与第一蓝牙4连接,第一蓝牙4通过无线方式接收第二蓝牙11传输来的数据,进而传递到上位机3中进行数据处理。
42.以上对本实用新型实施例所提供的一种轮对踏面多边形检测方法及系统进行了详细介绍。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。应当指出,实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围,凡根据依据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1