一种基于优化积分参数的线性复杂结构高效时程分析方法
本发明属于土木工程学科中求解结构动力学离散时间运动方程领域,具体涉及一种基于优化积分参数的线性复杂结构高效时程分析方法。
背景技术:
1、在结构动力学中,偏微分方程的准确求解是对各种系统进行结构动力学分析的基础。结构系统的动力响应分析主要采用模态分解法和直接积分法两种方法,模态分解法由于具有高精度的特性,被广泛应用于简单线性结构动力分析,而对于大型的复杂结构瞬态响应分析,直接积分法具有避免高阶的数学分析和更易于计算的优点,具有更明显的适用性。因此,直接积分法被广泛应用于结构动力学分析,有限元分析和实时子结构试验等多种复杂土木工程问题的求解。
2、直接积分算法可以根据其特点分为显式积分算法和隐式积分算法两类。隐式积分算法具有无条件稳定和数值阻尼可控的优点,被广泛应用于低模态响应的线性系统;然而隐式方法需要对结构系统矩阵进行反复的构造和分解,直至满足特定的收敛准则,因此计算量大,不适用于复杂结构。显式算法则避免了不必要的矩阵分解和收敛的判定,具有计算效率高的优势,被广泛应用于各种结构体系的动力学分析。
3、然而,显式积分算法,如newmark法,并不是无条件稳定的,需要极小的时间步长来保证其稳定性,这显然增加了结构动力分析的计算量。为解决这一问题,近年来,国内外许多专家学者在开发新的显式积分算法方面取得了一定的成果,其中基于模型的积分算法备受关注,如chang算法和cr算法。目前基于模型的积分算法,虽然能够保证无条件稳定,但在高阶模态下没有数值阻尼,不能保证其计算精度。因此有必要开发一种新的基于模型的积分算法,能够保证计算效率、计算精度和适用性。
技术实现思路
1、为解决上述问题,本发明提出了一种基于优化积分参数的线性复杂结构高效时程分析方法,采用优化算法,考虑结构自身特性参数(质量和刚度),采用优化算法,得出积分迭代增益矩阵的最优积分参数,从而更新积分过程中的迭代增益矩阵。算法具有无条件稳定,高阶数值阻尼可控的特点,具有高精度、高计算效率和适用范围广的优势。对于线性复杂系统的结构动力学分析、有限元分析和实时子结构试验具有重要意义。
2、本发明的技术方案是:
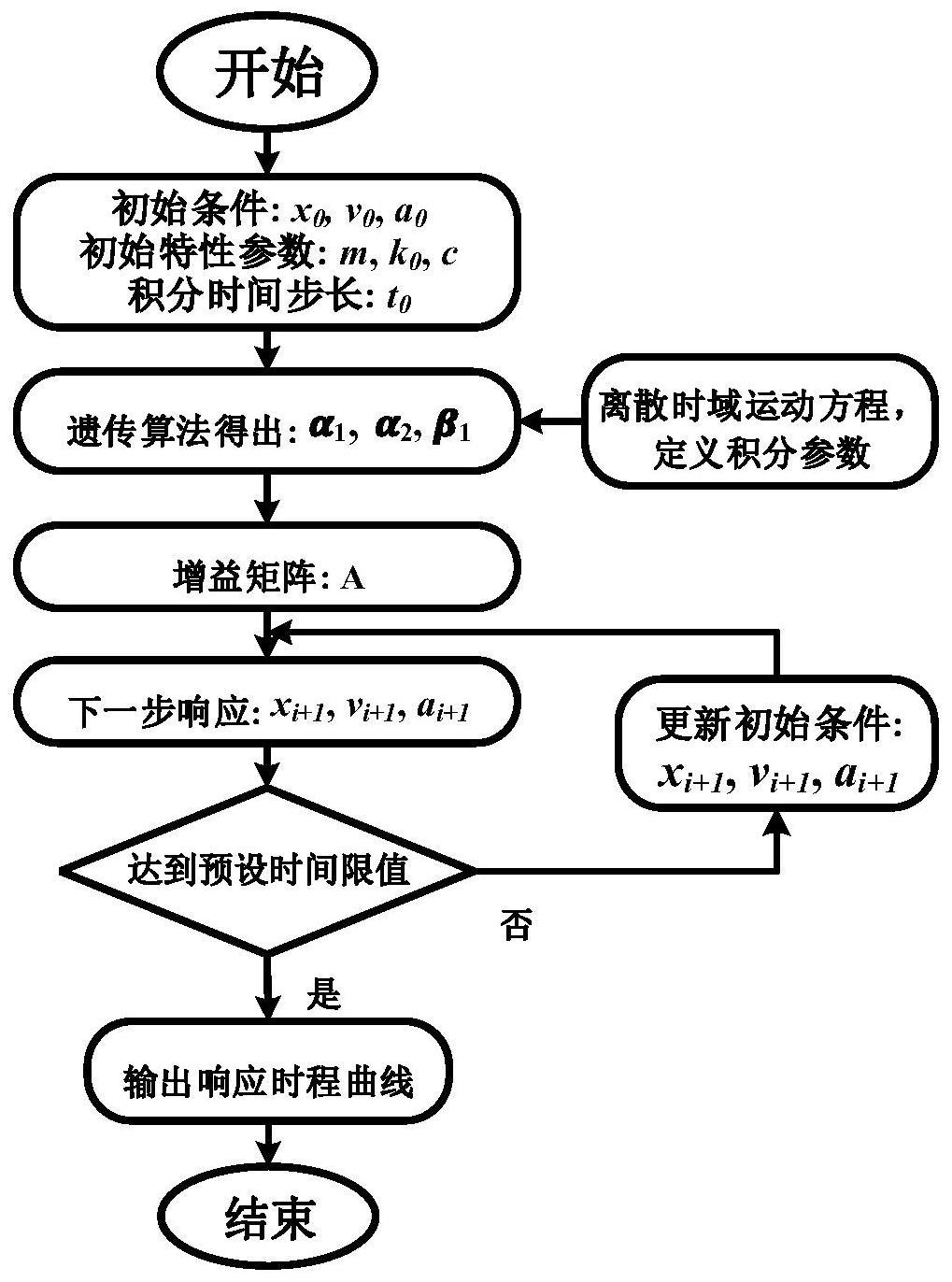
3、一种基于优化积分参数的线性复杂结构高效时程分析方法,首先,根据结构动力学方程离散时域公式,设定积分参数,建立积分算法的一般形式,进一步得出迭代增益矩阵。其次,根据结构自身特性得出初始参数和初始条件,同时设定积分时间步长;随后根据结构初始参数和初始条件,采用优化算法,得出最优积分参数;接下来,将得出的最优积分参数代入迭代增益矩阵,得出结构下一步的响应;然后,更新结构的初始条件,代入离散时域运动方程求解,直至达到预设时间,并输出结构的响应时程曲线。
4、具体步骤如下:
5、步骤一:设定积分参数,得出离散时域求解运动方程。
6、(1)根据结构动力平衡方程设定积分参数并得出增益矩阵。
7、对单自由度体系,根据动力平衡方程:
8、
9、其中k,c和m分别代表结构的刚度、粘滞阻尼和质量;fi+1=f(ti+1)代表外力,xi+1为第(i+1)步的位移,对应的,为速度,为加速度。设定离散时域求解运动方程为:
10、
11、
12、其中δt为时间间隔;α1,i、α2,i和βi是由优化得出的最优积分参数。整理得出离散时域求解运动方程的矩阵形式:
13、
14、
15、i={0 0 δt2/m}t
16、
17、
18、其中ω=ωδt;ξ=c/2mω;为结构自振频率,与质量和刚度相关;a为增益矩阵;而i为力的引导向量。
19、对于多自由度体系:
20、
21、
22、
23、其中m、c和k分别为多自由度体系的质量、阻尼和刚度矩阵,和
24、i可表示为以下形式:
25、
26、
27、
28、其中j=1,2,3,……,n为自由度数量。
29、步骤二:确定结构初始参数和初始条件。
30、(2.1)确定初始的结构特性参数(主要是质量m,刚度k和阻尼c),同时确定特定的时间步长δt。
31、(2.2)得到结构的初始状态,包括初始位移x0,初始速度v0以及初始加速度a0。
32、步骤三:优化目标的确定。
33、(3.1)定义优化目标为,自由振动条件下位移、速度和加速度与预期值的误差最小值,分别是:
34、
35、
36、
37、(3.2)采用线性加权模型对(3.1)中的三个优化目标进行处理,根据对不同优化目标的偏重设定可调的权重系数,得出综合优化目标函数:
38、
39、其中a,b和c为权重系数,a+b+c=1,具体数值可根据对不同优化目标的重要性需求具体设定。
40、步骤四:对算法的具体特性需求设定为优化过程中的约束条件,主要针对算法的稳定性,数值阻尼,周期畸变以及与精确解的误差
41、(4.1)为保证算法的稳定性,增益矩阵的谱半径必须保持在1以下,且自由振动响应必须保持正弦形式。
42、有增益矩阵a的特征方程为:
43、|a-λe|=λ3-2a1λ2+a2λ-a3
44、其中e为单位矩阵,λ为矩阵a的特征值;a1=1-1/4ω2α2,i-ξωβi为矩阵a迹的一半,a2=-1/2ω2α2,i+ω2α1,iβi-2ξωβi代表矩阵a的主项余子式之和,a3=0为矩阵a的行列式;特征方程的根为λ1,2=p±qi和伪根λ3=0。
45、因此,稳定性约束条件为:
46、ρ(a)=max|λ1,2|≤1
47、整理得出:
48、
49、同时为保证结构自由振动响应为正弦形式,需要特征方程的根λ1,2为复数,得到:
50、
51、(4.2)周期误差(period error,pe)和数值阻尼(amplitude decay,ad)一直以来是衡量时间离散积分算法的重要指标,将周期误差和数值阻尼设定为约束条件,同过设定不同的限值来满足不同结构动力计算的精度要求。
52、ad和pe分别可定义为:
53、
54、其中t=2πδt/ω分别为计算周期和真实周期;为计算频率,因此,pe可表示为:
55、
56、对于ad,常用等效阻尼比ξ表示,整理得出周期误差和数值阻尼相关的约束条件为:
57、
58、
59、其中p和q分别表示λ1,2的实部和虚部。需要特别注意的是,此处的limit可以根据结构动力计算精度需求自行设定。
60、(4.3)将算法响应(位移、速度和加速度)结果与精确解之间的误差(包括幅值误差和相位误差)限值设定为约束条件。
61、对自由振动体系,算法位移和精确解位移分别可表示为:
62、
63、
64、算法速度和精确解速度分别可表示为:
65、
66、
67、算法加速度和精确解加速度分别可表示为:
68、
69、
70、其中,
71、
72、
73、上式中,tn=nδt,x1和x2可由时域离散求解运动方程得出。假设a和ae分别代表算法幅值和精确幅值,θ和θe分别代表算法相位和精确相位,可整理得出约束条件:
74、a/ae-1≤limit
75、θ-θe≤limit
76、其中,
77、步骤五:采用优化算法,在约束条件下对优化目标寻求最小值。
78、(5.1)采用优化算法,如遗传算法(genetic algorithm,ga)、粒子群优化算法(particle swarm optimization,pso)等,根据计算精度和计算效率的平衡选取优化算法中迭代的次数和种群数目;同时参考其他基于模型的积分算法设定优化结果的上下限以及搜索速度。
79、(5.2)采用优化算法进行一次优化得出结构初始状态对应的最优积分参数α1、α2和β,进而得出对应的增益矩阵a。
80、步骤六:进行离散时域运动方程迭代求解,得出结构响应。
81、(6.1)将(5.2)中得出的增益矩阵a代入离散时域运动方程的矩阵形式,进行结构响应求解,得出下一步的响应。
82、(6.2)将(6.1)中的结构响应定义为结构新的初始状态对其进行更新,代入离散时域运动方程进行下一步求解,直至满足预先设定的时间条件,终止迭代并输出结构响应时程曲线。
83、依据以上整个流程,即可得出基于模型的最优积分参数,形成一种基于优化积分参数的线性复杂结构高效时程分析方法体系。
84、本发明的有益效果:该方法是一种完全显式的积分算法,具有无条件稳定的特性,由于优化过程中的约束条件可以自行设定,算法的在高阶模态下的数值阻尼是可控的;另一方面,算法的精度可以通过调整约束条件中的限值改变,因此,相比于传统的显式积分算法具有更广的适用范围;再者,确定的积分参数和对角形式的增益矩阵使其在复杂的线性结构中具有更高的计算效率。综上所述,本发明所提出的一种基于优化积分参数的线性复杂结构高效时程分析方法可以在系统的结构动力学分析、有限元分析和实时子结构试验中体现其优势。
- 还没有人留言评论。精彩留言会获得点赞!