一种基于随机连续仿真场景的预期功能安全验证方法与流程
本发明涉及汽车自动驾驶,具体涉及一种基于随机连续仿真场景的预期功能安全验证方法。
背景技术:
1、随着自动驾驶技术的发展,主机厂或用户对于车辆安全性的要求越来越高,自动驾驶汽车的安全性问题也受到社会的广泛关注。目前汽车行业内将车辆的安全问题分为三大类:功能安全问题、预期功能安全问题、信息安全问题。对于功能安全和信息安全问题都有较为明确的验证方法,但是预期功能安全如何确定验证方法,制定何种验证目标或风险可接受准则,成为了目前行业内的一大难题。为了验证自动驾驶汽车的安全性,亟需一种预期功能安全验证方法来指导主机厂。
2、目前行业内还没有较为权威的预期功能安全验证方法,部分专家提出的预期功能安全验证方法是通过实车长期测试实现的,车辆实车测试一定的里程数,在此段历程内没有出现事故,则证明自动驾驶车辆比人驾驶车辆要安全。上述方法存在以下缺点:一是实车测试的方法需要测试几十万公里的测试里程,且中途不能发生事故,否则需要重新加测试里程,导致测试周期太长,不具备实用的意义;二是实车测试时由于区域的限定,很难遇到较为危险的场景,一辆车测试不具备代表性,但若通过增加多辆车来增加场景的遍历,又会造成成本过高。
3、目前行业内也出现了通过仿真测试实现预期功能安全验证的技术,例如,中国专利授权公告号:cn110333730b,公开了一种自动驾驶算法预期功能安全的验证方法、平台及存储介质,包括:在matlab/simulink软件中建立自动驾驶功能算法,并通过虚拟场景建模软件建立自动驾驶功能算法相应的虚拟自动驾驶场景;由carsim建立实车动力学模型,并在硬件dspace scalexio系统里运行;将matlab/simulink软件中建立的自动驾驶功能算法在硬件dspace microautobox中实现快速原型;以上的闭环控制过程形成一个自动驾驶hil测试系统,在该系统中根据sotif危险场景进行虚拟建模,对dspace microautobox中的自动驾驶功能算法进行sotif的mil和hil验证。虽然上述专利实现了通过仿真进行预期功能安全的测试,但缺乏量化的确定的预期功能安全测试验证指标,仍然存在不易实现的缺点,不具备实用的意义。
技术实现思路
1、本发明主要是为了解决传统的汽车预期功能安全验证方法测试周期长、不易实现、成本高的问题,提供了一种基于随机连续仿真场景的预期功能安全验证方法,首先定义预期功能安全风险可接受准则,然后在仿真平台中随机加载触发条件,记录在触发条件的影响下测试车辆在测试路段发生事故的次数,并与预期功能安全风险可接受准则进行比较,达到验证自动驾驶汽车预期功能安全性的目的。本发明测试周期短、容易实现、成本低,具有量化的确定的预期功能安全验证指标,实用性可观。
2、为了实现上述目的,本发明采用以下技术方案。
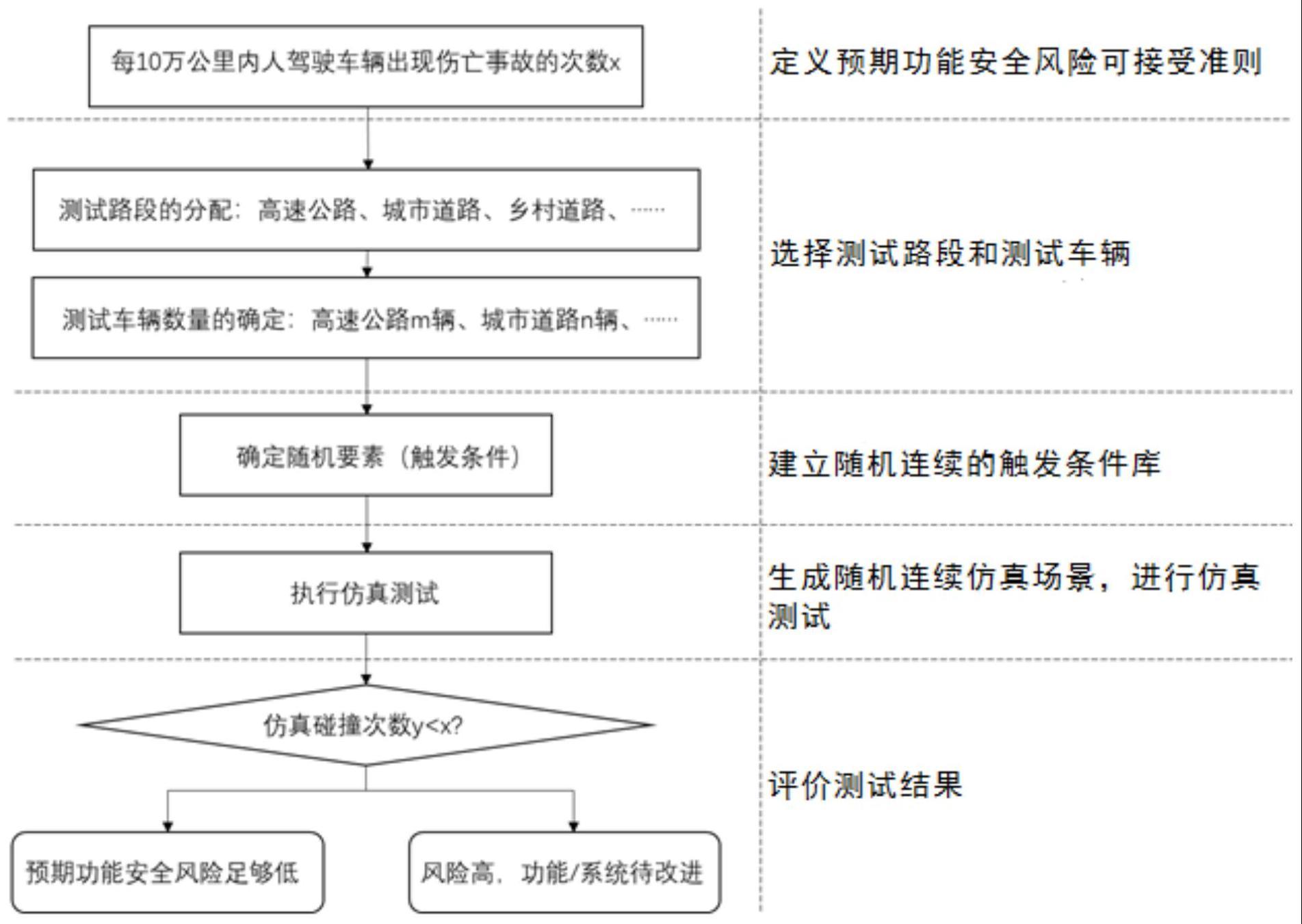
3、一种基于随机连续仿真场景的预期功能安全验证方法,包括以下步骤:
4、步骤s1:定义预期功能安全风险可接受准则;
5、步骤s2:选择测试路段和测试车辆;
6、步骤s3:建立随机连续的触发条件库;
7、步骤s4:生成随机连续仿真场景,进行仿真测试;
8、步骤s5:评价测试结果;
9、本发明提供了一种基于随机连续仿真场景的预期功能安全验证方法,首先定义预期功能安全风险可接受准则,然后选择测试路段和测试车辆,建立随机连续的触发条件(随机要素)库,接着在仿真平台中随机加载触发条件,记录在触发条件的影响下测试车辆在测试路段发生事故的次数,并与预期功能安全风险可接受准则进行比较,即可对自动驾驶汽车的安全性进行评价,达到验证自动驾驶汽车预期功能安全性的目的。本发明测试周期短、容易实现、成本低,具有量化的确定的预期功能安全验证指标,实用性可观。
10、作为优选,所述步骤s1的具体过程,包括以下步骤:
11、步骤s11:收集历史数据,获得人驾驶车辆一定距离出现的事故次数为x次;
12、步骤s12:定义自动驾驶车辆在一定距离内发生事故的次数为y次;
13、步骤s13:定义预期功能安全风险可接受准则为y<x;
14、本发明选取适当的数据来源,从中收集数据,获得人在驾驶汽车过程中,平均每10万公里(本发明一定距离可选10万公里)发生事故的次数为x次,假设自动驾驶车辆在10万公里内发生事故的次数为y次,只要y小于x,则说明自动驾驶汽车的预期功能安全风险可接受,所以预期功能安全风险可接受准则(即预期功能安全验证目标)为y<x。
15、作为优选,所述步骤s2的具体过程为:根据测试车辆设计运行域选择需要的测试路段类型,确定测试车辆数量并分配各个测试车辆对应的测试里程,所有测试车辆在所有的测试路段类型上的总测试里程等于所述一定距离;
16、本发明在仿真测试的10万公里中,选择测试路段类型,每个路段中分别用多辆车同时进行测试,以减少仿真测试的时间。例如,选择10辆车、3种路段类型测试10万公里,具体分配为:公路(高速公路、一级公路、二级公路等)测试4万公里(4辆车分别各仿真1万公里)、城市道路测试5万公里(5辆车分别各仿真1万公里)、乡村道路测试1万公里(1辆车仿真1万公里)。
17、作为优选,所述测试路段类型包括但不限于高速路段、城市道路或乡村道路。多个测试路段类型的选择,使得验证结果更具代表性。
18、作为优选,所述步骤s2中,可选择一个或多个车辆进行仿真测试。在各自的测试路段中,为减少测试历程和时间,可选择多个车辆同时进行测试。例如,城市道路分配的5万公里测试里程,可用5辆车,每辆车各测试1万公里进行代替。
19、作为优选,所述步骤s3的具体过程,包括以下步骤:
20、步骤s31:定义需要进行测试的预期功能安全的所有触发条件;
21、步骤s32:给每个触发条件编号,用于后续仿真测试;
22、先建立触发条件库(即随机要素库),用于仿真时生成随机场景。触发条件库可根据各公司现有的数据库进行选择。
23、作为优选,所述触发条件包括但不限于强光、大雨、行人横穿、标志牌或交通锥。连续随机的对象是触发条件。触发条件指的是引起预期功能安全问题的一些条件,例如强光、大雨、行人横穿、标志牌、交通锥等等。
24、作为优选,所述步骤s4的具体过程,包括以下步骤:
25、步骤s41:在仿真环境中搭建车辆模型以及基础路段模型;
26、步骤s42:编写触发条件注入的程序,在仿真过程中每隔设定距离产生一个触发条件;
27、步骤s43:测试在上述触发条件的影响下车辆是否会发生事故,记录车辆在所有测试路段发生事故的总次数为y次;
28、各公司可选取不同的仿真软件,仿真软件需能够搭建车辆模型、路段模型、触发条件模型。模型搭建完成后,编写随机要素(触发条件)注入的程序,开始测试,每隔500m(本发明设定距离可选500m)注入随机的触发条件,测试在该触发条件下车辆是否会发生事故,每发生事故一次记录次数+1。
29、作为优选,所述步骤s5的具体过程为:仿真完成后,将仿真环境中所有车辆在所有测试路段发生事故的总次数y与预期功能安全风险可接受准则进行比较,即可对自动驾驶汽车的预期功能安全性进行评价,
30、如果y<x,则认为自动驾驶汽车的预期功能安全风险低,是可接受的;
31、如果y≥x,则认为自动驾驶汽车的预期功能安全风险高,是不可接受的,需进一步完善车辆设计;
32、其中,x的值可来源于事故风险调研的统计数据。
33、因此,本发明的优点是:本发明首先定义预期功能安全风险可接受准则,然后在仿真平台中随机加载触发条件,记录在触发条件的影响下测试车辆在测试路段发生事故的次数,并与预期功能安全风险可接受准则进行比较,达到验证自动驾驶汽车预期功能安全性的目的,测试周期短、容易实现、成本低,具有量化的确定的预期功能安全验证指标,实用性可观。
- 还没有人留言评论。精彩留言会获得点赞!