基于计算机视觉的配网带电作业引流线夹定位方法
本技术涉及电网引流线夹图像识别领域,具体涉及一种基于计算机视觉的配网带电作业引流线夹定位方法。
背景技术:
1、电网引流作业是在已有输电线路上搭接支线的作业。由于主线电压较高,电流较大,一旦断电会对居民生活和企业生产有较大影响,造成诸多不便,因此,电网引流作业大部分是带电作业,但是这种作业方式是在高压线路附近作业,存在很多安全隐患,比如高空坠落、高压触电等人员伤亡事故。
2、为了提高带电作业效率和带电作业自动化水平,保证带电作业人员人身安全,减轻作业人员的劳动强度,研制一种配网带电作业机器人具有十分重要的意义。但在某些特殊环境下,配网带电作业机器人依旧需要人工介入,特别是引导引流线进入通用线夹的孔位过程中,需要操作人员手动完成送线。要想实现引流线穿入线夹无人引导,精准的获取线夹孔洞位置是重要条件。
3、在作业过程中,引流线和母线所在的孔洞位置中心为锁紧螺杆,且孔洞的位置和螺杆的位置相对固定,若能确定中心螺杆的位置,就能间接确定线夹孔洞的位置。因此,中心螺杆的图像分割成为了实现线夹孔洞定位的方法。
4、目前,对于螺杆的图像分割方法主要有两种,第一种是螺纹参数的检测,先采用ncc(normalized cross correlation)归一化匹配算法,识别螺杆上的螺纹并找到螺杆上的中心位置,再通过roi裁剪设计,获得矩形图像,最后对螺纹进行特征提取,实现对螺纹得大径、小径以及对螺距的参数获取;第二种是螺纹缺陷的识别,先要将图片进行专业处理,如像素灰度调整及去噪等操作,最大力度使图片清晰化,再利用灰度的梯度矩阵进行计算,收集螺杆表面外螺纹的各项数据,与标准数据进行对比。
5、以上两种方法均是通过对螺杆上螺纹的数据采集,进而分析螺杆的具体情况。尽管螺纹检测技术能够有效保障其精确度,但对于检测系统的硬件构成要求较高,如其相机为像素较高的工业相机;镜头为较为昂贵的定焦镜头。测量环境也是影响精确度的重要条件,在较为开放的环境中,光源并没有垂直照射到零件表面,造成零件上有大片阴影或者曝光过度,图像的质量大大降低。这些条件都会导致螺纹图像识别的结果不理想,进而影响中心螺杆的图像的分割,无法实现线夹孔洞定位。
技术实现思路
1、本发明的目的在于,提供一种基于计算机视觉的配网带电作业引流线夹定位方法,利用配网带电作业机器人包含的可远程传输图像的摄像头对引流线夹螺杆进行图像采集,通过deeplabv3+语义分割卷积神经网络模型对引流线夹中心螺杆进行自动化分割,实现对线夹孔洞的定位,克服了现有技术对镜头像素以及光源有较高依赖性的缺陷,适用于户外作业。
2、本发明采取的技术方案是:一种基于计算机视觉的配网带电作业引流线夹定位方法,包括如下步骤:
3、s100:将收集到的将引流线夹图像数据随机打乱,平均分成五组;
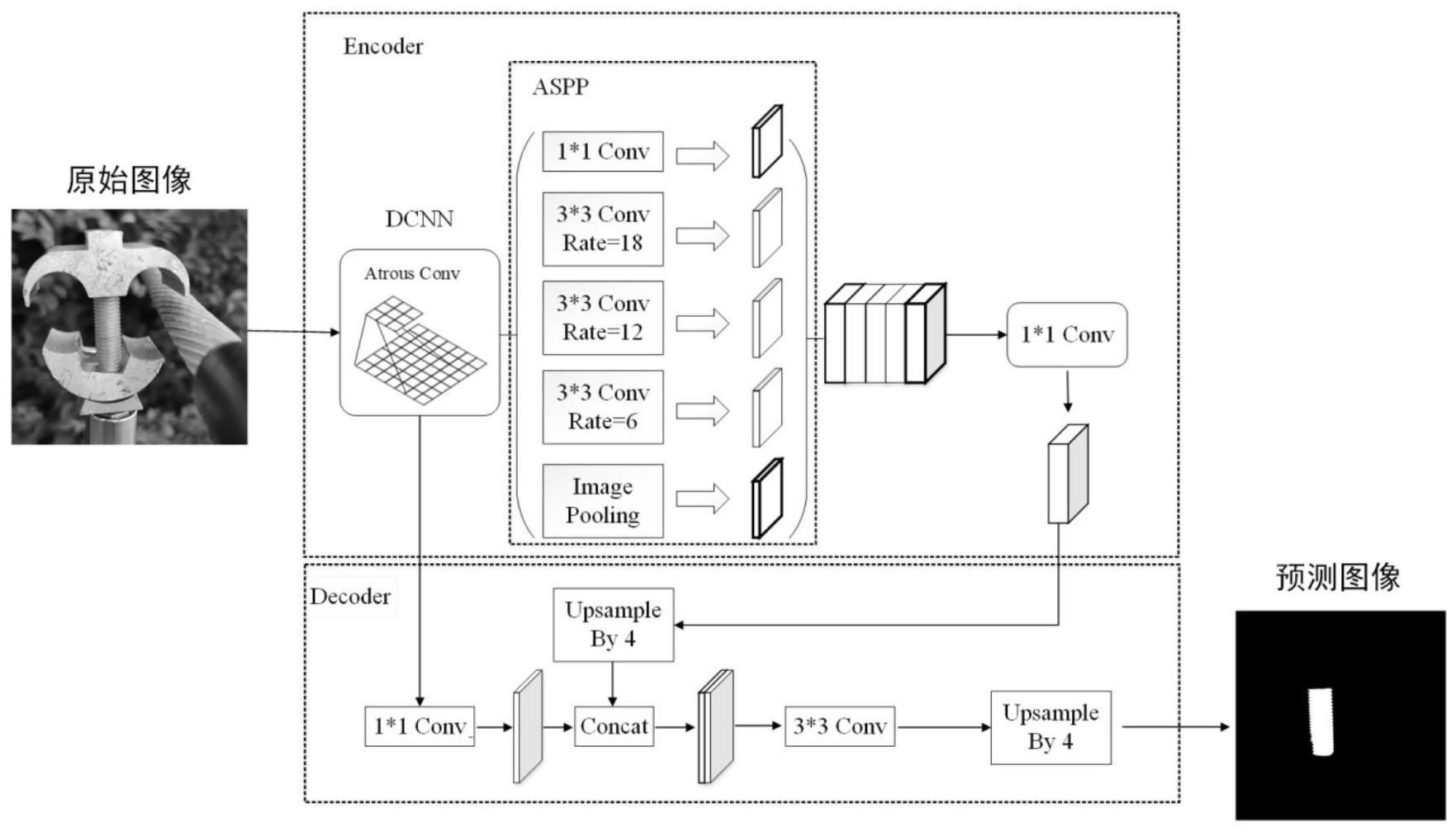
4、s200:构建deeplabv3+语义分割卷积神经网络模型,所述deeplabv3+语义分割卷积神经网络模型包括编码部分和解码部分;编码部分包括dcnn网络、aspp网络和第一卷积层;所述dcnn网络使用改进的xception网络作为基网络,所述改进的xception网络使用具有跨步的空洞卷积替代原xception网络中的最大池化操作,dcnn网络用于进行特征通道数扩增;所述aspp网络包括五个支路,第一支路为卷积,第二至第四支为深度可分离卷积与空洞卷积的结合,第五支路是全局平均池化,aspp网络用于输出五个特征层,第一卷积层用于进行五个特征层级联;解码部分包括第二卷积层、第三卷积层、第一4倍上采样模块和第二4倍上采样模块,特征通道数扩增的特征层和五个特征层分别通过第二卷积层和第一4倍上采样模块处理后进行级联,再依次经过第三卷积层和第二4倍上采样模块进行处理;
5、s300:采用五重交叉验证法对所述deeplabv3+语义分割卷积神经网络模型进行训练,将其中一组引流线夹图像数据作为测试集,剩余四组引流线夹图像数据通过图像增强技术进行扩充,将扩充后的引流线夹图像数据中的10%作为验证集,其余为训练集;将训练集输入deeplabv3+语义分割卷积神经网络模型进行训练,训练过程包括编码过程和解码过程;
6、编码过程由deeplabv3+语义分割卷积神经网络模型的编码部分进行处理,dcnn网络进行下采样以及池化操作将网络的特征通道数进行扩增,再经过aspp网络处理得到五个特征层,将五个特征层级联进行级联,通过第一卷积层进行卷积处理,得到特征图像;
7、解码过程由deeplabv3+语义分割卷积神经网络模型的解码部分进行处理,将编码过程中得到的五个特征层通过第一4倍上采样模块进行4倍上采样处理,将处理后特征层与经过dcnn网络进行特征通道数扩增的特征层进行级联,并通过第三卷积层细化特征,最后通过第二4倍上采样模块进行处理,得到引流线夹中心螺杆的预测图像;
8、s400:使用验证集对训练后的deeplabv3+语义分割卷积神经网络模型的识别效果进行验证,完成对deeplabv3+语义分割卷积神经网络模型的训练;
9、s500:使用训练完成的deeplabv3+语义分割卷积神经网络模型对采集的引流线夹图像的中心螺杆进行定位识别。
10、进一步地,所述步骤s300中通过图像增强技术对引流线夹图像数据进行扩充的具体方法如下:
11、(1)将图像进行随机旋转,旋转角度为0~40°;
12、(2)将图像在水平或垂直方向上进行随机平移,平移范围为图像长度或图像高度的-20%~20%;
13、(3)将图像进行随机错切变换,图像倾斜的角度为[-0.2°,0.2°];
14、(4)将图像进行随机缩放,缩放比例为0.8~1.2倍;
15、(5)将图像中随机将一半的图像进行水平翻转;
16、(6)采用最近邻插值算法在图像上随机填充新创建的像素。
17、进一步地,所述空洞卷积通过在卷积核中插入空洞来增加卷积核大小,加入空洞后的卷积核有效大小k’为:
18、k'=k+(k-1)×(d-1)
19、其中,k为加入空洞前的卷积核大小,d为膨胀率;
20、空洞卷积的感受野为:
21、fi+1=(2i+2-1)*(2i+2-1)
22、其中,fi+1表示i+1层的感受野,i为感受野的层数。
23、本发明的有益效果在于:通过deeplabv3+语义分割卷积神经网络模型对引流线夹孔洞图像进行识别,在deeplabv3+语义分割卷积神经网络模型中加入了深度可分离卷积,对分割网络的速度进行优化,降低卷积计算量;并且采用并行空洞卷积,在不损失信息的情况下,加大了感受野,使详细空间信息更加确定,可以获得更多数据细节,提高识别精准率;整个识别过程包括编码和解码过程,使线夹与复杂背景分割的更容易,与现有的pspnet、u-net和segnet网络相比,本发明在敏感性、dice相似性、iou和pa指标上都不同程度的提高,分隔性能更加稳定,在引流线夹边缘细节部分处理的精确性较好,使的对中心螺杆分割能力的显著增强,并且本技术的模型损失值最低,具有良好的拟合效果和鲁棒性;本发明所述的方法成功实现了引流线夹与复杂背景的分割,无需过度依赖高清摄像头或者光源即可达到自动定位的目的,为电网引流作业的智能化提供了有力的技术保障。
- 还没有人留言评论。精彩留言会获得点赞!