一种林业图斑变化快速识别方法及系统与流程
本发明属于图斑监测,具体涉及一种林业图斑变化快速识别方法及系统。
背景技术:
1、林业图斑是指利用卫星遥感技术,获得某个时间内所监测的林业土地范围内用地情况的图像,结合gis地理信息系统技术,给所监测的林业土地用一定的规则进行分区编号,而这个编号就称为图斑。利用卫星遥感技术进行林业土地资源监测越来越普及,而林业图斑在划定的过程中由于受到了诸多人为因素的影响,忽略了质量指标以及空间分布的合理性,存在林业土地和普通的工业、农业用地重叠的情况,
2、目前,结合gis地理信息系统技术获得的林业图斑,将林业土地和普通的工业、农业用地进行空间叠加相交分析,从而获得两图层间重叠的林业图斑。现有技术,例如公开号为cn111797190a的发明专利提供了一种图斑提取方法及装置,依据约束条件选取目标重叠图斑,筛选因子满足约束条件的重叠图斑。将形状、面积、地类区域、以及地类区域的面积占比作为重叠图斑的筛选因子,依据约束条件,针对性地从各个重叠图斑中筛选出目标重叠图斑,但是,通过空间叠加相交分析之后,会产生碎小图斑、图斑形状狭长、图斑数量多等情况,无法识别出一些逐渐恶意占地,或者重叠边界的图斑区域,尤其是在一些区域经过时间较长的开发或者人为改变导致地形地貌发生改变、或者自然灾害、地质活动频繁的区域、人为恶意占地导致林业图斑无法准确的识别。
技术实现思路
1、本发明的目的在于提出一种林业图斑变化快速识别方法及系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、为了实现上述目的,根据本发明的一方面,提供一种林业图斑变化快速识别方法,所述方法包括以下步骤:
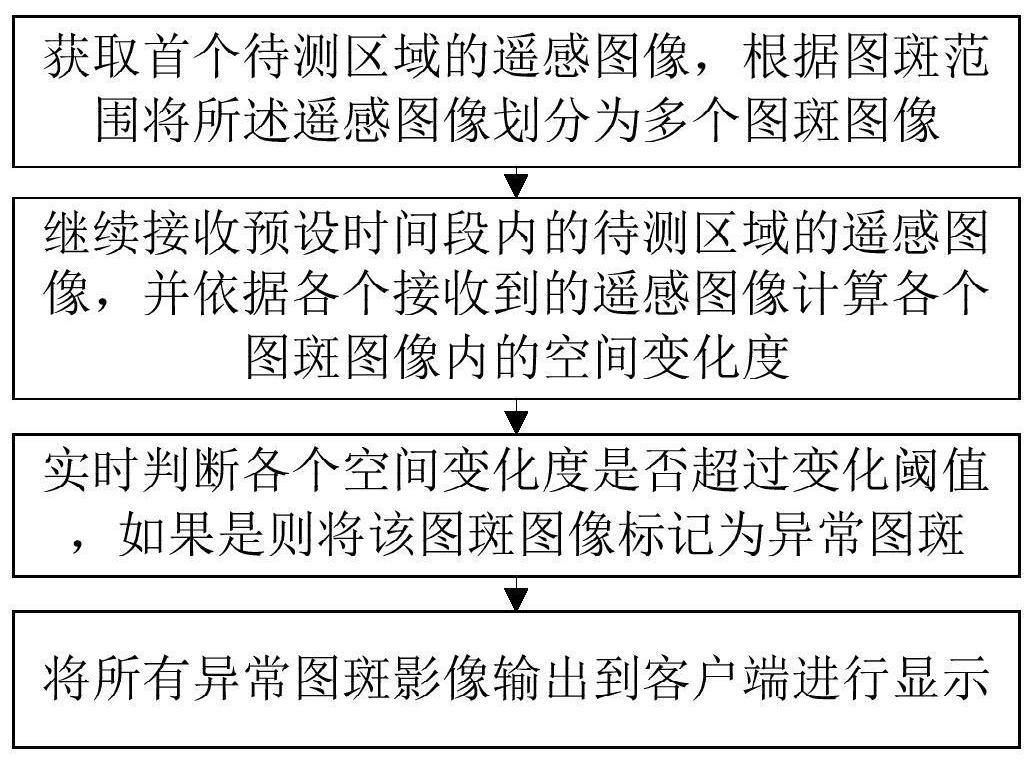
3、s100,获取首个待测区域的遥感图像,根据图斑范围将所述遥感图像划分为多个图斑图像;
4、s200,继续接收预设时间段内的待测区域的遥感图像,并依据各个接收到的遥感图像计算各个图斑图像内的空间变化度;
5、s300,实时判断各个空间变化度是否超过变化阈值,如果是则将该图斑图像标记为异常图斑;
6、s400,将所有异常图斑影像输出到客户端进行显示。
7、进一步地,在s100中,所述待测区域为林地,所述林地是生长有乔木、竹类、灌木、沿海红树林的土地,所述林地不包括居民绿化用地,以及铁路、公路、河流沟渠的护路、护草林。
8、进一步地,在s100中,根据图斑范围将所述遥感图像划分为多个图斑图像的方法为:将地貌、土地利用类型相同、水土流失类型一致的林业土地地块分为一类,以该一类林业土地地块作为图斑范围,以图斑范围内的林业土地地块作为基础调查单元,然后将图斑范围勾绘到遥感图像上成为图斑;(其中,遥感图像上的最小图斑面积不小于0.5cm2,实地面积0.5km2;最大不超过50cm2,实地面积50km2),通过图像分割或者矢量图套合,将整个遥感图像根据图斑划分成若干个小的区域,以所述区域作为图斑图像。
9、进一步地,在s200中,接收预设时间段内的待测区域的遥感图像为:以1~3天为时间间隔在预设时间段中进行采集待测区域的遥感图像;所述预设时间段为最近120~360天的时间,以1~3天为时间间隔进行采集待测区域的遥感图像;所述遥感图像通过无人机或卫星的机载遥感设备采集待测区域的遥感图像,所述机载遥感设备为sar遥感设备。
10、进一步地,在s200中,依据各个接收到的遥感图像计算各个图斑图像内的空间变化度的方法为:
11、以各个接收到的遥感图像构成的集合记为image={imgi1},imgi1是集合image中的第i1个遥感图像,i1是集合image中遥感图像的序号,sum1是集合image中遥感图像的总数;
12、取各个图斑图像在遥感图像上的对应区域的集合作为监测集合suv={suvyi2},suvyi2是集合suv中的第i2个图斑图像在遥感图像上的对应区域,i2是集合suv中图斑图像在遥感图像上的对应区域的序号,sum2是监测集合suv中元素的总数;
13、将image中所有遥感图像imgi1灰度化后经过边缘检测得到多个边缘线,由各个边缘线构成多个封闭区域;筛选出各个封闭区域中的封闭区域在遥感图像上的对应区域的几何重心和suvyi2的几何重心之间的欧氏距离最短的封闭区域记为suvyi2在遥感图像imgi1上的映射区域suvyi1,i2,则suvyi2在遥感图像imgi1上有一个对应的映射区域suvyi1,i2;
14、在i1∈[2,sum1-1]、i2∈[2,sum2-1]的范围内,遍历映射区域suvyi1,i2,如果首次遍历到映射区域suvyi1,i2、suvyi1-1,i2和suvyi1+1,i2之间存在补集,则以suvyi1,i2的几何重心为锚定点anchor,以补集区域的边缘线上的各个点中与anchor之间距离最大的点为pmax,以补集区域的边缘线上的各个点中与anchor之间距离最小的点为pmin,同时记对应的遥感图像imgi1的采集时间为t1,以t1到当前时间t0之间的时间段为空间变化时间tg;(补集区域是映射区域suvyi1,i2、suvyi1-1,i2和suvyi1+1,i2之间做求补集运算得到的区域);
15、其中,suvyi1-1,i2和suvyi1+1,i2分别是suvyi2在遥感图像imgi1-1上的映射区域和suvyi2在遥感图像imgi1+1上的映射区域;
16、对于在一些区域经过时间较长的开发或者人为改变导致地形地貌发生改变、或者自然灾害、地质活动频繁的区域、人为恶意占地发生变化后的待测区域,由于已经监测到地图的图斑区域(图斑也可以为根据行政界线,土地权属界线或线状地物所分割的地块)由于遥感图像中图斑边界发生了变化,所以在它们之间存在补集后(即图斑图像的邻接区域suvyi1,i2、suvyi1-1,i2和suvyi1+1,i2的边界发生变化后),点pmax和点pmin之间的线段的长度会随时间发生变化;
17、以点pmax和点pmin之间的线段为lp;记在空间变化时间tg内线段lp的长度为最大值时的线段为lpmax;记在空间变化时间tg内线段lp的长度为最小值时的线段为lpmin;则,以包含在线段lpmax中但是不包含在线段lpmin的线段为lpcha,即线段lpcha为在线段lpmax上删除线段lpmin后剩下的部分;
18、计算图斑图像suvyi2内的空间变化度spchai2:
19、
20、其中,spac(lpcha,i3)为suvyi2对应的线段lpcha上的第i3个点的空间弹性值,i3是变量,sum3是线段lpcha上点的数量,log指取对数;
21、suvyi2对应的线段lpcha上的第i3个点的空间弹性值spac(lpcha,i3)的计算方法为:
22、以在空间变化时间tg内面积最小的补集区域为参照区域a,以在空间变化时间tg内面积最大的补集区域为参照区域b;依次计算以参照区域a的边缘线上的各个点到锚定点anchor之间所有距离值的平均值为avgspa,依次计算以参照区域b的边缘线上的各个点到锚定点anchor之间所有距离值的平均值为avgspb,
23、spac(lpcha,i3)=(|avgspa-space(i3)|+|avgspb-space(i3)|)÷2;
24、其中,space(i3)为线段lpcha上的第i3个点到锚定点anchor之间的距离值。
25、有益效果为:根据空间变化度能够准确的监控到最近的图斑图像的邻接区域的细微的变化,能够准确的防止不明显的恶意占地,只是从遥感图像上监测位置变化,极大的减少了识别的误差率,平衡了图斑边界识别的灵敏性和地图上图斑边界变化的识别的准确性。
26、进一步地,在s300中,实时判断各个空间变化度是否超过变化阈值,如果是则将该图斑图像标记为异常图斑的方法为:在i2∈[1,sum2]的取值范围内,计算所有的图斑图像suvyi2内的空间变化度spchai2的算数平均值记为变化阈值,标记所有的空间变化度spchai2大于或等于变化阈值的的图斑图像为异常区域。
27、进一步地,在s400中,将所有异常图斑影像输出到客户端进行显示的方法为:
28、将所有异常图斑的在遥感图像上相应位置进行图像增强,然后将图像增强后的遥感图像传输到客户端的显示屏进行显示输出。
29、本发明还提供了一种林业图斑变化快速识别系统,所述一种林业图斑变化快速识别系统包括:处理器、存储器及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述一种林业图斑变化快速识别方法中的步骤,所述一种林业图斑变化快速识别系统可以运行于桌上型计算机、笔记本、掌上电脑及云端数据中心等计算设备中,可运行的系统可包括,但不仅限于,处理器、存储器、服务器集群,所述处理器执行所述计算机程序运行在以下系统的单元中:
30、图斑划分单元,用于获取首个待测区域的遥感图像,根据图斑范围将所述遥感图像划分为多个图斑图像;
31、变化计算单元,用于继续接收预设时间段内的待测区域的遥感图像,并依据各个接收到的遥感图像计算各个图斑图像内的空间变化度;
32、异常识别单元,用于实时判断各个空间变化度是否超过变化阈值,如果是则将该图斑图像标记为异常图斑;
33、图斑显示单元,用于将所有异常图斑影像输出到客户端进行显示。
34、本发明的有益效果为:本发明提供一种林业图斑变化快速识别方法及系统,根据空间变化度能够准确的监控到最近的图斑图像的邻接区域的细微的变化,能够准确的防止不明显的恶意占地,只是从遥感图像上监测位置变化,极大的减少了识别的误差率,平衡了图斑边界识别的灵敏性和地图上图斑边界变化的识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!