一种关节角度预测方法、装置、设备及介质
本公开涉及数据处理,尤其涉及一种关节角度预测方法、装置、设备及介质。
背景技术:
1、近年来,脑卒中患者的发病率不断增加,对于大部分脑卒中患者采用合适的愈后康复治疗,能够恢复患者的运动机能。采用上肢康复机器人进行康复训练,能够缓解巨大的康复压力,通过实时测量机器人的运动参数、患者的生理参数等,能够实现康复训练的实时调整,提高康复效率与康复效果。
2、通常,与通过机器人机械式带动患者运动的被动康复模式相比,主动康复模式具有更好的康复效果。目前实现主动训练模式,关键在于如何正确理解人的运动意图,相较于视频、力矩、惯性传感器等,semg(surface electromyography,表面肌电信号)比肢体运动一般超前30~150ms产生,具有可穿戴、侵入性小、超前运动产生等优点,能够实现超期预测。相关技术中,基于semg信号的离散动作分类,只能预测少部分离散动作,采用离散动作预测结果无法实现机器人关节连续自如的活动。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开提供了一种关节角度预测方法、装置、设备及介质。
2、本公开实施例提供了一种关节角度预测方法,所述方法包括:
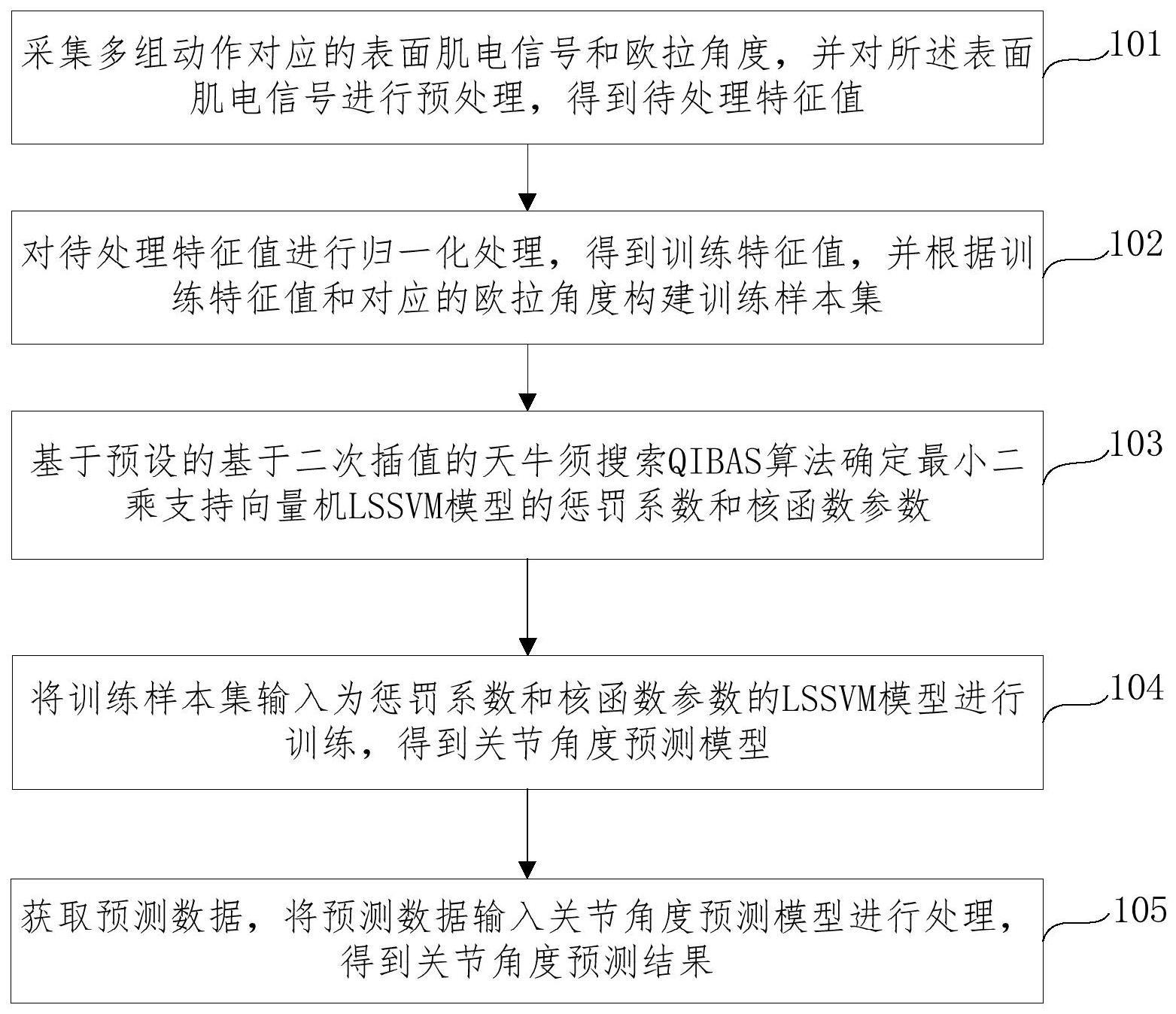
3、采集多组动作对应的表面肌电信号和欧拉角度,并对所述表面肌电信号进行预处理,得到待处理特征值;
4、对所述待处理特征值进行归一化处理,得到训练特征值,并根据所述训练特征值和对应的欧拉角度构建训练样本集;
5、基于预设的基于二次插值的天牛须搜索qibas(quadratic interpolationbeetle antennae search algorithm)算法确定最小二乘支持向量机lssvm(leastsquares support vector machine)模型的惩罚系数和核函数参数;
6、将所述训练样本集输入为所述惩罚系数和所述核函数参数的lssvm模型进行训练,得到关节角度预测模型;
7、获取预测数据,将所述预测数据输入所述关节角度预测模型进行处理,得到关节角度预测结果。
8、可选地,所述对所述表面肌电信号进行预处理,得到待处理特征值,包括:
9、对所述表面肌电信号进行滤波处理后,通过公式semgfull(n)=|semg(n)|对滤波处理后的表面肌电信号进行全波整流;其中,semg(n)为滤波后semg信号的第n个离散型采样样本,semgfull(n)为全波整流后semg信号的第n个样本;
10、通过公式对全波整流后的表面肌电信号进行降采样;其中,w为表面肌电信号的降采样次数,semgi(n)为第n个semg数据段的平均值;
11、对降采样后的表面肌电信号进行特征值计算,得到波形长度、平均绝对值、方差、积分肌电值、均方根值和过零点数;
12、将所述波形长度、所述平均绝对值、所述方差、所述积分肌电值、所述均方根值和所述过零点数中的一种或者多种作为所述待处理特征值。
13、可选地,所述对所述待处理特征值进行归一化处理,得到训练特征值,并根据所述训练特征值和对应的欧拉角度构建训练样本集,包括:
14、通过公式对所述待处理特征值进行归一化处理,得到训练特征值;其中,x和x'分别表示待处理特征值和训练特征值,xmax和xmin表示特征值的最大值和最小值;
15、根据所述训练特征值和对应的欧拉角度构建训练样本集为x=[x1,x2,...,xi],i=1,2,...,n和y=[y1,y2,...,yi],i=1,2,...,n;其中,xi为[xmav,xvar,...,xrms],表示第i组所有归一化之后的特征值的组合序列,n为标签个数。yi为[yyaw,ypitch,yroll],表示对应动作采样的欧拉角度,构建训练样本集为(xi,yi)。
16、可选地,所述基于预设的基于二次插值的天牛须搜索qibas算法确定最小二乘支持向量机lssvm模型的惩罚系数和核函数参数,包括:
17、初始化qibas算法的参数,所述参数包括甲虫的初始位置和初始方向,初始化迭代次数t=1,并初始化步长系数和[0,1]内的递减系数;
18、计算甲虫两个触须的位置,将初始的甲虫个体分别带入lssvm模型中,并计算两个触角的适应度值,根据所述两个触角的适应度值的比较结果更新甲虫的位置;
19、甲虫位置每更新一次,迭代次数加1,两个触角位置将作为新的二次插值区间,建立一个与目标值相差小于预设阈值的低阶多项式,基于所述低阶多项式确定目标解,并根据迭代的多个所述目标解和预设的设置精度值确定目标解区间,以及根据所述目标解区间和当前全局目标位置确定所述惩罚系数和所述核函数参数。
20、可选地,所述将所述训练样本集输入为所述惩罚系数和所述核函数参数的lssvm模型进行训练,得到关节角度预测模型,包括:
21、通过公式对所述训练样本集中的训练特征值进行计算,得到训练关节角度;其中,k(xi,xj)为核函数,αi为拉格朗日算子,c为偏移量;其中,为所述核函数参数;
22、根据所述训练关节角度、所述训练样本集中的欧拉角度和所述惩罚系数调整所述关节角度预测模型的模型参数,直到所述训练关节角度和所述欧拉角度的误差小于预设训练误差阈值,得到所述关节角度预测模型。
23、可选地,所述采集多组动作对应的表面肌电信号和欧拉角度,包括:
24、控制目标物体按照所述多组动作进行运动,在运动的过程中,获取所述目标物体上多个目标位置的表面肌电信号,并通过深度相机采集所述目标物体上多个目标关节的坐标信息;
25、根据所述坐标信息进行计算,得到所述欧拉角度。
26、可选地,所述的关节角度预测方法,还包括:
27、通过公式计算所述关节角度预测结果和所述实际关节角度的均方误差;
28、通过公式计算所述关节角度预测结果和所述实际关节角度的平均相对误差;
29、其中,为t时刻的关节角度预测结果,yt为t时刻的实际关节角度,l为样本总数;
30、基于所述均方误差、所述平均相对误差和预设的误差阈值确定所述关节角度预测模型的预测结果。
31、本公开实施例还提供了一种关节角度预测装置,所述装置包括:
32、采集模块,用于采集多组动作对应的表面肌电信号和欧拉角度,
33、处理模块,用于对所述表面肌电信号进行预处理,得到待处理特征值;
34、处理构建模块,用于对所述待处理特征值进行归一化处理,得到训练特征值,并根据所述训练特征值和对应的欧拉角度构建训练样本集;
35、确定模块,用于基于预设的基于二次插值的天牛须搜索qibas算法确定最小二乘支持向量机lssvm模型的惩罚系数和核函数参数;
36、训练模块,用于将所述训练样本集输入为所述惩罚系数和所述核函数参数的lssvm模型进行训练,得到关节角度预测模型;
37、预测模块,用于获取预测数据,将所述预测数据输入所述关节角度预测模型进行处理,得到关节角度预测结果。
38、本公开实施例还提供了一种电子设备,所述电子设备包括:处理器;用于存储所述处理器可执行指令的存储器;所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述指令以实现如本公开实施例提供的关节角度预测方法。
39、本公开实施例还提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行如本公开实施例提供的关节角度预测方法。
40、本公开实施例提供的技术方案与现有技术相比具有如下优点:本公开实施例提供的关节角度预测方案,采集多组动作对应的表面肌电信号和欧拉角度,并对所述表面肌电信号进行预处理,得到待处理特征值,对待处理特征值进行归一化处理,得到训练特征值,并根据训练特征值和对应的欧拉角度构建训练样本集,基于预设的基于二次插值的天牛须搜索qibas算法确定最小二乘支持向量机lssvm模型的惩罚系数和核函数参数,将训练样本集输入为惩罚系数和核函数参数的lssvm模型进行训练,得到关节角度预测模型,获取预测数据,将预测数据输入关节角度预测模型进行处理,得到关节角度预测结果。采用上述技术方案,通过提取运算简单的特征值,并采用lssvm模型实现关节角度预测,加速预测过程、以及采用qibas算法,缩短训练时间、加速模型收敛,从而能够提高关节角度预测效率和预测精度,实现采用semg对关节的欧拉角进行预测,能够充分发挥用户的主动运动意图,避免了运动信息测量的滞后,用户能够根据运动意愿自主选择康复动作,动作种类不会受到限制,满足用户使用需求。
- 还没有人留言评论。精彩留言会获得点赞!