基于体素的点云高精地图融合偏差消除方法及系统与流程
本发明涉及高精地图建图的,具体地,涉及基于体素的点云高精地图融合偏差消除方法及系统。
背景技术:
1、高精地图作为自动驾驶的必要辅助手段,其应用的关键点在于建图精度要高,而大范围建图时往往需要将多段采集数据融合到一起,多段采集数据中会存在一些重合的建图路线,一般而言,由于传感器误差及环境因素的影响,同一个位置多次采集数据建图后,每一次建图的点坐标会存在一定程度的偏差,这会影响建图的精度。融合建图会将不一致的偏差消除,但建图数据融合前后的位姿会发生变化,制作地图人员需要根据建图数据融合后的位姿变化,重新修改由融合前的建图数据制作好的地图,增加了建图成本和周期。
2、在公开号为cn115526914a的专利文献中公开了一种基于多传感器的机器人实时定位和彩色地图融合映射方法,快速采集周边环境信息,并实时构建彩色全局地图。视觉、激光、惯性传感器采集模块通过读取传感器的信息,对激光点云数据进行累加,形成点云扫描帧,然后进行预处理,得到提取后的特征点云,同时对不同传感器采集到的数据进行时间同步。利用采集到的激光和惯性数据实时对机器人进行自定位,同时构建单帧点云地图。利用视觉传感器采集到的rgb信息,对构建的全局点云地图进行纹理和颜色渲染,构建单帧彩色地图。
3、针对上述中的相关技术,发明人认为现有技术中制作地图人员根据建图数据融合后的位姿变化重新修改由融合前的建图数据制作好的地图,增加了建图成本和周期。因此,需要提出一种新的技术方案以改善上述技术问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于体素的点云高精地图融合偏差消除方法及系统。
2、第一方面,本发明提供的一种基于体素的点云高精地图融合偏差消除方法,包括如下步骤:
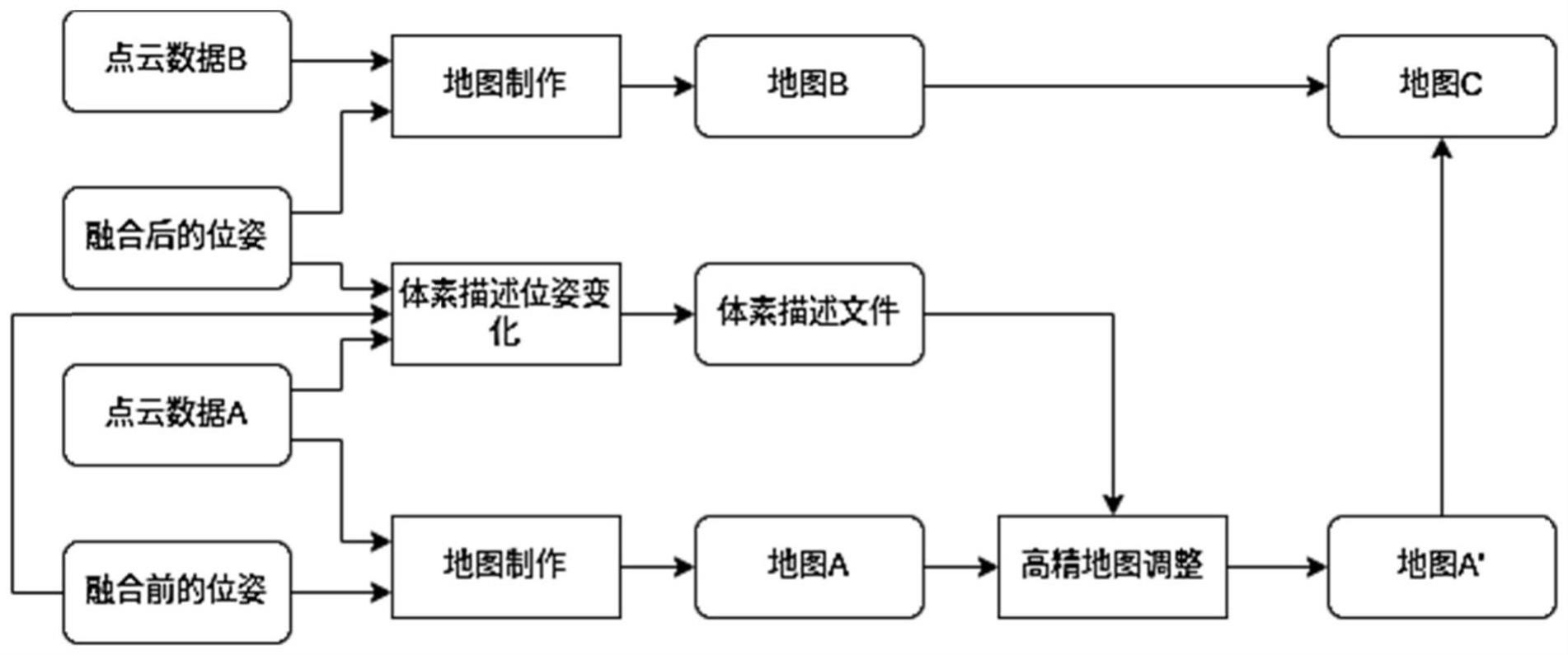
3、步骤s1:采集待构建地图a的点云数据,得到点云数据集a;
4、步骤s2:将点云数据集a根据融合前的位姿进行地图制作,生成地图a;
5、步骤s3:采集待构建地图b的点云数据,得到点云数据集b;且地图a和地图b之间有线路重合,将点云数据集a和点云数据集b进行融合,生成融合后的位姿;
6、步骤s4:将点云数据集b根据融合后的位姿进行地图制作,生成地图b;
7、步骤s5:对点云数据集a和融合前后的位姿计算位姿变化,并根据体素坐标,生成体素描述文件;
8、步骤s6:点云数据集a通过查询体素描述文件进行调整,根据调整后的点云数据集a和融合后的位姿,对地图a进行调整,得到地图a';
9、步骤s7:将地图a'和地图b进行叠加融合,得到地图c。
10、优选地,所述步骤s1中采用激光雷达采集地图a的点云数据,并通过slam建图优化,获取融合前的位姿。
11、优选地,所述步骤s3中点云数据集a和点云数据集b融合后,通过slam建图,对地图a和地图b进行拼接和优化,获取融合后的位姿。
12、优选地,所述步骤s4中的点云数据集b包括与点云数据集a融合的部分以及与点云数据集a非融合的部分。
13、优选地,所述步骤s5中的点云数据集a包括与点云数据集b融合的部分以及与点云数据集b非融合部分。
14、优选地,所述步骤s5包括:
15、步骤s5.1:对点云数据集a中的每帧点云,分别根据融合前的位姿和融合后的位姿进行投影;
16、步骤s5.2:根据两次投影结果,计算投影坐标偏移量;
17、步骤s5.3:根据每帧点云的utm坐标计算体素坐标,并将偏移量存储在该体素中;
18、步骤s5.4:遍历所有帧点云,对每个体素中的偏移量进行统计,并计算偏移量均值;
19、步骤s5.5:扩展点云计算范围,对点云覆盖不到的体素也计算其偏移量,最后将所有体素及其对应的偏移量保存成体素描述文件。
20、优选地,所述步骤s5.5中体素描述文件根据地图的版本迭代而进行相应的版本迭代,点云数据集a查询体素描述文件的版本进行调整,版本关系用来判断地图调整前的版本是否对应符合体素描述文件的版本,若符合,则使用该体素描述文件进行地图调整;若不符合,则不使用该体素描述文件进行地图调整。
21、第二方面,本发明还提供一种基于体素的点云高精地图融合偏差消除系统,包括如下模块:
22、模块m1:采集待构建地图a的点云数据,得到点云数据集a;
23、模块m2:将点云数据集a根据融合前的位姿进行地图制作,生成地图a;
24、模块m3:采集待构建地图b的点云数据,得到点云数据集b;且地图a和地图b之间有线路重合,将点云数据集a和点云数据集b进行融合,生成融合后的位姿;
25、模块m4:将点云数据集b根据融合后的位姿进行地图制作,生成地图b;
26、模块m5:对点云数据集a和融合前后的位姿计算位姿变化,并根据体素坐标,生成体素描述文件;
27、模块m6:点云数据集a通过查询体素描述文件进行调整,根据调整后的点云数据集a和融合后的位姿,对地图a进行调整,得到地图a';
28、模块m7:将地图a'和地图b进行叠加融合,得到地图c。
29、优选地,所述模块m1中采用激光雷达采集地图a的点云数据,并通过slam建图优化,获取融合前的位姿。
30、优选地,所述模块m3中点云数据集a和点云数据集b融合后,通过slam建图,对地图a和地图b进行拼接和优化,获取融合后的位姿。
31、优选地,所述模块m4中的点云数据集b包括与点云数据集a融合的部分以及与点云数据集a非融合的部分。
32、优选地,所述模块m5中的点云数据集a包括与点云数据集b融合的部分以及与点云数据集b非融合部分。
33、优选地,所述模块m5包括:
34、模块m5.1:对点云数据集a中的每帧点云,分别根据融合前的位姿和融合后的位姿进行投影;
35、模块m5.2:根据两次投影结果,计算投影坐标偏移量;
36、模块m5.3:根据每帧点云的utm坐标计算体素坐标,并将偏移量存储在该体素中;
37、模块m5.4:遍历所有帧点云,对每个体素中的偏移量进行统计,并计算偏移量均值;
38、模块m5.5:扩展点云计算范围,对点云覆盖不到的体素也计算其偏移量,最后将所有体素及其对应的偏移量保存成体素描述文件。
39、优选地,所述模块m5.5中体素描述文件根据地图的版本迭代而进行相应的版本迭代,点云数据集a查询体素描述文件的版本进行调整,版本关系用来判断地图调整前的版本是否对应符合体素描述文件的版本,若符合,则使用该体素描述文件进行地图调整;若不符合,则不使用该体素描述文件进行地图调整。
40、与现有技术相比,本发明具有如下的有益效果:
41、1、本发明根据点云融合前后的位姿变化,将点云变化通过体素进行描述,高精地图的点可以通过查询体素中的偏移,自动化调整已经建好的地图;通过这种方式,不需要对已经建好的高精地图进行反复修改,能够较大程度缩短高精地图的制图成本和周期;
42、2、本发明通过根据建图数据融合前后的位姿,生成可以调整高精地图的文件,通过使用该文件可以达到让已经建好的地图要素自动调整位置的目的,减少人工投入和地图维护的难度;
43、3、本发明的输入为激光雷达传感器得到的点云数据集和与之对应的点云融合前后的位姿,高精地图通过查询体素描述文件完成自动调整。
- 还没有人留言评论。精彩留言会获得点赞!