环视投影方法、装置、计算机设备、存储介质与流程
本公开涉及计算机视觉,特别是涉及一种环视投影方法、装置、计算机设备、存储介质。
背景技术:
1、随着计算机视觉技术的快速发展和移动硬件处理能力的不断提升,计算机视觉在自动驾驶方面得到不断的应用,并逐渐发挥出愈加重要的作用。
2、在自动驾驶中最广泛的应用是利用多个相机拍摄到的图像构建环视全景图像,用于辅助驾驶。
3、然而,传统技术中的车载环视技术主要存在以下问题:具有2d拼接的环视影像,虽然可以将车身周围信息及时反馈给驾驶员,但是其具有可视范围小,畸变过大的缺点,驾驶员在观察画面时,不能及时显示车身在真实环境下的处境。特别是未加入融合环境信息的2d环视,未对画面的光照进行处理,不能保证画面的一致性,视角感受较差。另外,碗状建模的3d环视影像,基本可以呈现出车辆的真实驾驶路况,但是碗状模型一般为固定模型,立体物体由于投影原理限制(曲面投影)和视差在交界处容易出现非常突兀的过渡区域,在远处也易形成较大的错位。
4、另外,目前的车载环视技术由于其环视影像上立体物体的畸变过大,影响图像中的物体投影的立体感和真实感,并且各种区域之间容易形成错位,会影响用户对障碍物判断的准确性。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种改善环视影像上立体物体的畸变效果,保证物体投影成像的立体感和真实感的环视投影方法、装置、计算机设备、存储介质。
2、第一方面,本公开提供了一种环视投影方法。所述方法包括:
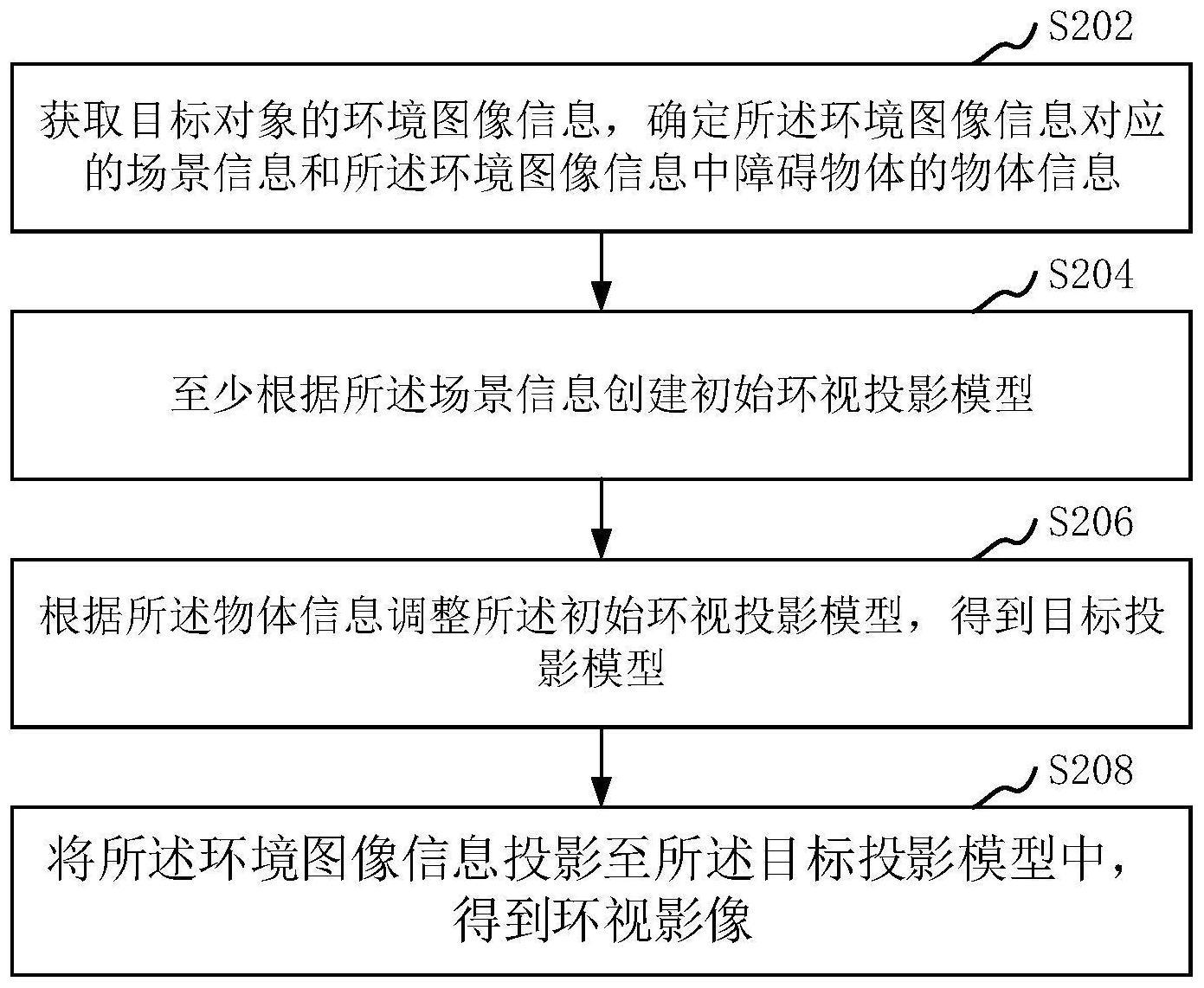
3、获取目标对象的环境图像信息,确定所述环境图像信息对应的场景信息和所述环境图像信息中障碍物体的物体信息;
4、至少根据所述场景信息创建初始环视投影模型;
5、根据所述物体信息调整所述初始环视投影模型,得到目标投影模型;
6、将所述环境图像信息投影至所述目标投影模型中,得到环视影像。
7、在其中一个实施例中,所述根据所述物体信息调整所述初始环视投影模型,包括:
8、根据所述物体信息中障碍物至目标对象的距离信息和方位信息,调整所述初始环视投影模型中空间部分的坡度数据和所述初始环视投影模型中起始距离。
9、在其中一个实施例中,所述初始环视投影模型中包括多个区域,各所述区域对应的曲面表面上的曲线光滑连续,所述区域是根据区域划分信息划分所述初始环视投影模型得到的;其中,所述区域划分信息包括:传感器的检测信息和/或所述物体信息中的物体范围信息。
10、在其中一个实施例中,所述根据所述物体信息调整所述初始环视投影模型,还包括:
11、根据所述物体信息对所述初始环视投影模型的多个区域进行合并,并根据所述物体信息调整多个区域进行合并后的所述初始环视投影模型中空间部分的坡度数据和所述初始环视投影模型中起始距离。
12、在其中一个实施例中,所述根据所述物体信息中距离信息和方位信息,调整所述初始环视投影模型中空间部分的坡度数据和所述初始环视投影模型中起始距离,包括:
13、响应于所述距离信息处于预设的第一范围信息中,根据所述方位信息调整所述初始环视投影模型中与所述障碍物体对应的一侧的空间部分的坡度数据和起始距离;
14、响应于所述距离信息小于预设的第一阈值时,调整所述初始环视投影模型中空间部分的坡度数据和起始距离为预设的坡度数据和预设的起始距离。
15、在其中一个实施例中,所述根据所述物体信息对所述初始环视投影模型的多个区域进行合并,包括:
16、响应于所述多个区域中相邻的区域未存在障碍物体,将未存在障碍物体的所述相邻的区域合并,得到第一区域;
17、响应于多个区域中的相邻的区域存在所述障碍物体,将存在所述障碍物体的所述相邻的区域合并,得到第二区域;
18、其中,所述第一区域和所述第二区域为不相同的区域。
19、在其中一个实施例中,所述根据所述物体信息对所述初始环视投影模型的多个区域进行合并,包括:
20、响应于所述多个区域中相邻的区域未存在所述障碍物体,确定所述多个区域中存在所述障碍物体的区域;
21、响应于所述存在所述障碍物体的区域之间间隔的区域的数量小于预设的数量阈值,将所述存在所述障碍物体的区域和间隔的区域合并。
22、在其中一个实施例中,所述至少根据所述场景信息创建初始环视投影模型,包括:
23、至少根据所述场景信息确定初始环视投影模型的模型类型和参数信息;
24、根据所述初始环视投影模型的模型类型和参数信息创建初始环视投影模型。
25、在其中一个实施例中,所述方法还包括:在调整所述初始环视投影模型的过程中,利用样条曲线或三次曲线对所述初始环视投影模型的空间部分和底部平面部分进行渐变方式的调整,且所述初始环视投影模型的底部平面部分的形状在预设范围内进行调整。
26、第二方面,本公开还提供了一种环视投影装置。所述装置包括:
27、数据获取模块,用于获取目标对象的环境图像信息,确定所述环境图像信息对应的场景信息和所述环境图像信息中障碍物体的物体信息;
28、模型创建模块,用于至少根据所述场景信息创建初始环视投影模型;
29、模型调整模块,用于根据所述物体信息调整所述初始环视投影模型,得到目标投影模型;
30、投影模块,用于将所述环境图像信息投影至所述目标投影模型中,得到环视影像。
31、第三方面,本公开还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一方法实施例的步骤。
32、第四方面,本公开还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一方法实施例的步骤。
33、第五方面,本公开还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任一方法实施例的步骤。
34、上述各实施例中,通过获取环境图像信息,确定环境图像信息对应的场景信息和物体信息,能够确定当前需要投影的环境场景当前场景中障碍物体对应的物体信息。可以根据场景信息来构建初始的初始环视投影模型。使构建的初始环视投影模型能够符合当前的环境场景,并且后续调整均以该初始环视投影模型为基础,保证与当前的场景信息适配,提高环境图像投影的准确性。并且根据障碍物体的物体信息进行调整初始环视投影模型,能够改善环境图像信息中立体物体在投影时的畸变效果,将环境图像信息投影至所述目标投影模型中后,得到环视影像可以提升物体投影成像的立体感和真实感。
技术特征:
1.一种环视投影方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述物体信息调整所述初始环视投影模型,包括:
3.根据权利要求1所述方法,其特征在于,所述初始环视投影模型中包括多个区域,各所述区域对应的曲面表面上的曲线光滑连续,所述区域是根据区域划分信息划分所述初始环视投影模型得到的;其中,所述区域划分信息包括:传感器的检测信息和/或所述物体信息中的物体范围信息。
4.根据权利要求3所述的方法,其特征在于,所述根据所述物体信息调整所述初始环视投影模型,还包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述物体信息中距离信息和方位信息,调整所述初始环视投影模型中空间部分的坡度数据和所述初始环视投影模型中起始距离,包括:
6.根据权利要求4所述的方法,其特征在于,所述根据所述物体信息对所述初始环视投影模型的多个区域进行合并,包括:
7.一种环视投影装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本公开涉及一种环视投影方法、装置、计算机设备、存储介质。所述方法包括:获取目标对象的环境图像信息,确定所述环境图像信息对应的场景信息和所述环境图像信息中障碍物体的物体信息;至少根据所述场景信息创建初始环视投影模型;根据所述物体信息调整所述初始环视投影模型,得到目标投影模型;将所述环境图像信息投影至所述目标投影模型中,得到环视影像。采用本方法能够改善环视影像上立体物体的畸变效果,提升物体投影成像的立体感和真实感。
技术研发人员:李帅帅,公海峰,张健
受保护的技术使用者:蔚来汽车科技(安徽)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!