时空结合降噪方法、装置、电子设备和存储介质与流程
本发明涉及图像处理,特别涉及一种时空结合降噪方法、装置、电子设备和存储介质。
背景技术:
1、在医学影像检查中,x射线成像技术是使用最为广泛的技术之一。对于实时透视图像(即x射线图像),通常使用多帧图像叠加(时域降噪)的方法来降低图像噪声。然而,当被拍摄物(例如,受试者的各种自主和非自主运动)或者成像设备本身发生运动时,多帧叠加会带来明显的运动伪影,少叠加或者不叠加又会造成图像中存在较大的噪声。为此,现有技术中常常根据运动情况在图像的不同区域使用不同的叠加权重以减小运动伪影。但是,不同的叠加权重往往造成一幅图像不同区域的噪声水平存在差异,图像质量有待进一步提高。
2、需要说明的是,公开于该发明背景技术部分的信息仅仅旨在加深对本发明一般背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于针对现有技术中存在的在对实时透视图像进行降噪时同一图像不同区域噪声水平存在差异的问题,提供一种时空结合降噪方法、装置、电子设备和存储介质,以使得实时透视图像的噪声水平趋于一致,提高图像质量。
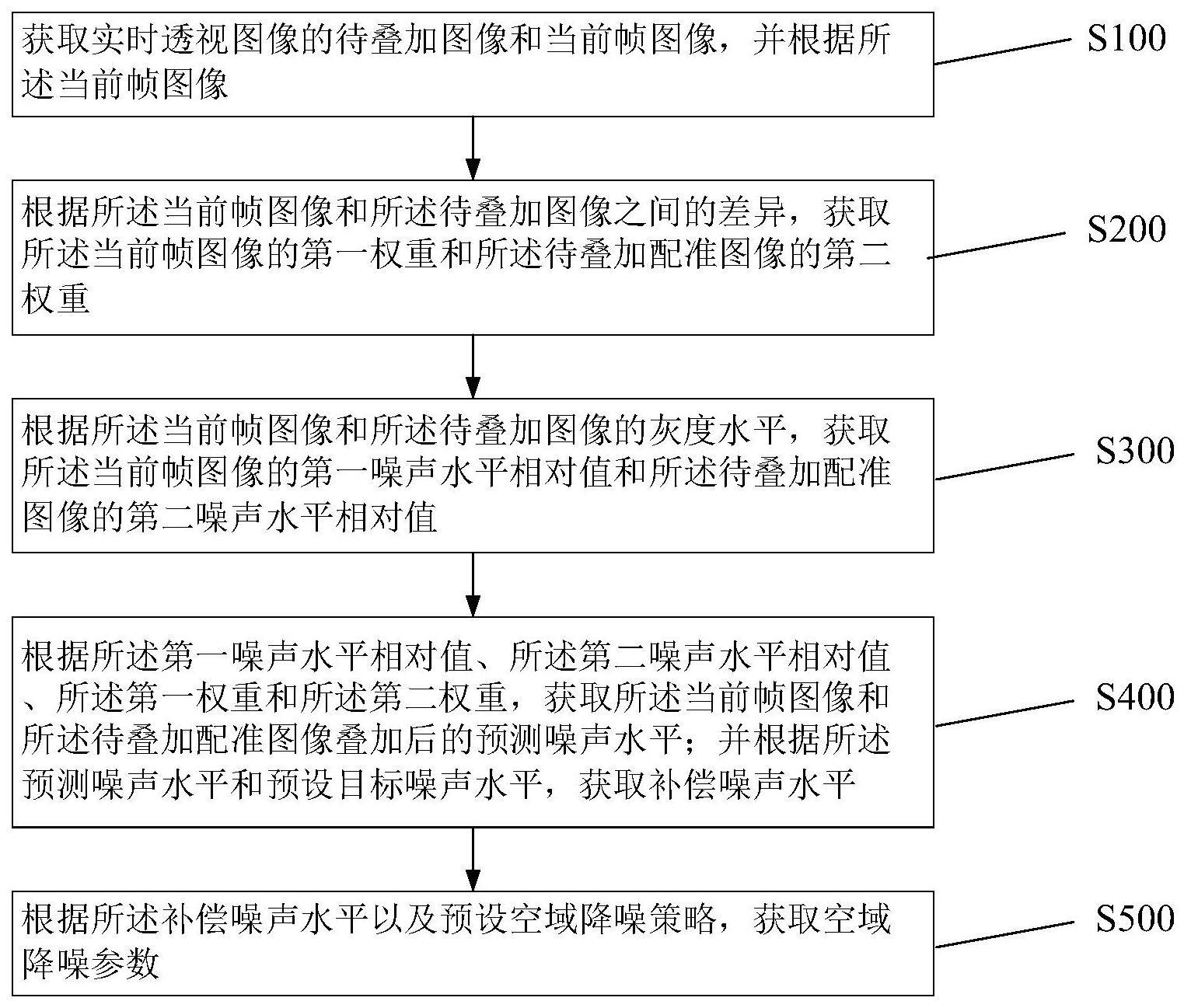
2、为达到上述目的,本发明通过以下技术方案实现:一种时空结合降噪方法,包括:
3、获取实时透视图像的待叠加图像和当前帧图像;
4、根据所述当前帧图像和所述待叠加图像之间的差异,获取所述当前帧图像的第一权重和所述待叠加图像的第二权重;
5、根据所述当前帧图像和所述待叠加图像的灰度水平,获取所述当前帧图像的第一噪声水平相对值和所述待叠加图像的第二噪声水平相对值;
6、根据所述第一噪声水平相对值、所述第二噪声水平相对值、所述第一权重和所述第二权重,获取所述当前帧图像和所述待叠加图像叠加后的预测噪声水平;并根据所述预测噪声水平和预设目标噪声水平,获取补偿噪声水平;
7、根据所述补偿噪声水平以及预设空域降噪策略,获取空域降噪参数。
8、可选地,所述时空结合降噪方法还包括:
9、对所述待叠加图像进行运动补偿,并使用运动补偿后的所述待叠加图像作为所述待叠加图像。
10、可选地,所述时空结合降噪方法,包括:
11、根据所述当前帧图像的每一个像素点的像素值与所述待叠加图像对应位置的像素点的像素值的差异,计算所述当前帧图像的每一个像素点的第一权重;并根据所述第一权重,计算所述待叠加图像的每一个像素点的第二权重;
12、或
13、根据所述当前帧图像和所述待叠加图像之间的图像相似度,确定所述当前帧图像的第一权重;并根据所述第一权重,确定所述待叠加图像的第二权重。
14、可选地,所述时空结合降噪方法,还包括对所述第一权重归一化至0-1之间;并根据下式计算所述第二权重:
15、wa=1-wb
16、式中,wb为所述第一权重,wa为所述第二权重;
17、获取所述当前帧图像中图像灰度小于预设灰度阈值的灰度区域;并根据所述灰度区域的图像灰度,减小所述灰度区域对应的所述第一权重。
18、可选地,所述时空结合降噪方法,还包括:获取所述当前帧图像中与所述待叠加图像之间的差异大于预设差异阈值的运动区域;并根据所述当前帧图像中所述运动区域与所述待叠加图像对应区域之间的差异,增大所述运动区域对应的所述第一权重。
19、可选地,所述时空结合降噪方法包括:
20、根据所述当前帧图像和所述待叠加图像的灰度水平,采用噪声模型获取所述当前帧图像的第一噪声水平相对值和所述待叠加图像的第二噪声水平相对值。
21、可选地,所述补偿噪声水平通过下式计算得到:
22、nt=ndst-nc
23、式中,nt为所述补偿噪声水平,ndst为所述预设目标噪声水平,nc为所述预测噪声水平。
24、为了实现上述目的,本发明还提供了一种时空结合降噪装置,所述时空结合降噪装置包括:
25、图像帧获取单元,配置为获取实时透视图像的待叠加图像和当前帧图像,并根据所述当前帧图像;
26、图像权重获取单元,配置为根据所述当前帧图像和所述待叠加图像之间的差异,获取所述当前帧图像的第一权重及所述待叠加图像的第二权重;
27、噪声水平相对值获取单元,配置为根据所述当前帧图像和所述待叠加图像的灰度水平,获取所述当前帧图像的第一噪声水平相对值和所述待叠加图像的第二噪声水平相对值;
28、补偿噪声水平获取单元,配置为根据所述第一噪声水平相对值、所述第二噪声水平相对值、所述第一权重和所述第二权重,获取所述当前帧图像和所述待叠加图像叠加后的预测噪声水平;并根据所述预测噪声水平和预设目标噪声水平,获取补偿噪声水平;
29、空域降噪参数获取单元,配置为根据所述补偿噪声水平以及预设空域降噪策略,获取空域降噪参数。
30、为了实现上述目的,本发明还提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现上述任一项所述的时空结合降噪方法。
31、为了实现上述目的,本发明还提供了一种可读存储介质,所述可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时,实现上述任一项所述的时空结合降噪方法。
32、与现有技术相比,本发明提供的时空结合降噪方法、装置、电子设备和存储介质具有以下优点:
33、本发明提供的时空结合降噪方法,首先获取实时透视图像的待叠加图像和当前帧图像;然后根据所述当前帧图像和所述待叠加图像之间的差异,获取所述当前帧图像的第一权重和所述待叠加图像的第二权重;接着根据所述当前帧图像和所述待叠加图像的灰度水平,获取所述当前帧图像的第一噪声水平相对值和所述待叠加图像的第二噪声水平相对值;再根据所述第一噪声水平相对值、所述第二噪声水平相对值、所述第一权重和所述第二权重,获取所述当前帧图像和所述待叠加图像叠加后的预测噪声水平;并根据所述预测噪声水平和预设目标噪声水平,获取补偿噪声水平;最后根据所述补偿噪声水平以及预设空域降噪策略,获取空域降噪参数。由此可见,本发明提供的时空结合降噪方法,根据时域降噪后不同区域的噪声水平估算需要的空域降噪强度,从而补偿时域降噪不同区域权重不同造成的噪声水平的差异,能够使得实时透视图像的噪声水平趋于一致,提升图像质量。
34、进一步地,本发明提供的时空结合降噪方法,还包括根据所述灰度区域的图像灰度,减小所述灰度区域对应的所述第一权重,和/或根据所述当前帧图像中所述运动区域与所述待叠加图像对应区域之间的差异,增大所述运动区域对应的所述第一权重。由此可见,本发明提供的时空结合降噪方法,通过根据灰度和运动情况对叠加权重进一步加权,能够减少运动模糊,提高图像对比度,从而更进一步地提升图像质量。
35、由于本发明提供的时空降噪结合装置、电子设备和存储介质,与本发明提供的时空结合降噪方法属于同一发明构思,因此,本发明提供的时空降噪结合装置、电子设备和存储介质至少具有本发明提供的时空结合降噪方法的所有优点,更详细的内容请参见上文时空结合降噪方法相关的描述,在此,不再一一赘述。
- 还没有人留言评论。精彩留言会获得点赞!